基于视觉的车辆自动控制的方法分析
2021-01-10 12:42唐文
内燃机与配件 2021年24期
唐文





摘要: 车辆无人驾驶为智能交通主要部分,主要目的就是设计辅助驾驶系统,代替驾驶员,完成车辆自动控制与驾驶,避免出现交通事故,使道路交通系统效率得到提高。所以,本文设计了基于视觉技术的车辆自动控制和驾驶系统,能够使改进模糊控制算法使智能车在道路中平稳、快速的运行,缩小转弯处超调。
Abstract: Unmanned vehicle is the main part of intelligent transportation. The main purpose is to design an auxiliary driving system to replace the driver, complete the automatic control and driving of the vehicle, avoid traffic accidents and improve the efficiency of the road traffic system. Therefore, this paper designs a vehicle automatic control and driving system based on vision technology, which can improve the fuzzy control algorithm, make the intelligent vehicle run smoothly and quickly on the road, and reduce the overshoot at the turn.
关键词: 视觉技术;车辆自动控制;汽车自动化
Key words: visual technology;automatic vehicle control;automotive automation
中图分类号:TP391.41 文獻标识码:A 文章编号:1674-957X(2021)24-0224-03
0 引言
在世界经济不断发展过程中,城市化进程也在不断加剧,汽车成为人们生活与生产中的主要交通工具。在汽车保有量不断增长的过程中,交通事故发生率也在不断提高,为人们财产、人身安全造成了严重损失。目前,国内外企业和科研机构都开始使用科技手段使车辆安全得到提高,比如辅助安全驾驶系统、疲劳预警等。虽然目前车辆智能化程度比较高,但是人们不满足现状,希望能够开发完全自动驾驶车辆,提高人们出行舒适性。智能车辆研究能够使交通运输能力得到提高,降低交通事故,促进汽车工业未来发展,所以备受重视。
1 车辆运动模型
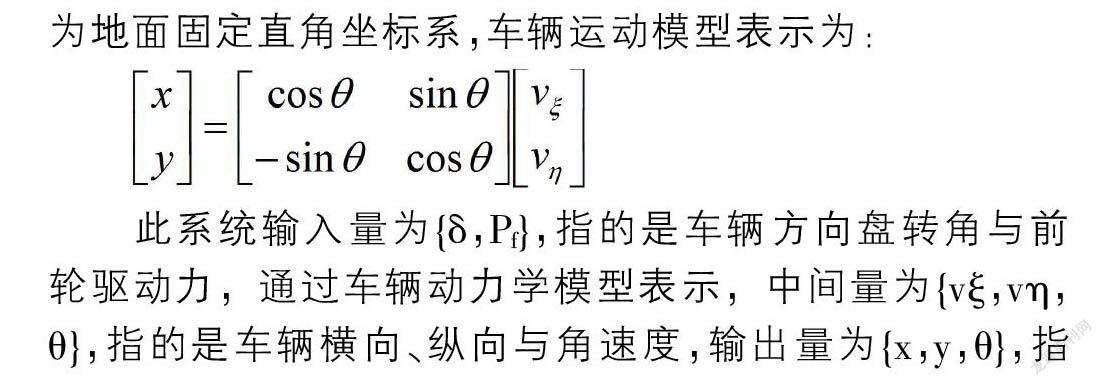
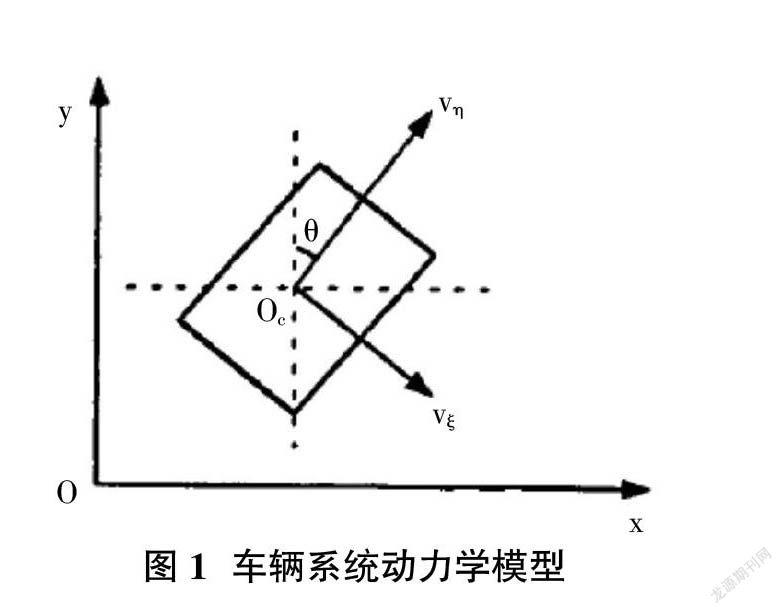
目前,世界各国家都在对智能交通运输系统进行研究,车辆无人驾驶为智能交通系统中的主要部分,主要目的就是开发高速公路与城市道路环境下辅助驾驶系统,帮助取代驾驶员,从而实现车辆自动驾驶,降低交通事故发生率,使道路交通系统效率得到提高。在计算机技术与图像处理技术不断发展的过程中,基于视觉导航与智能控制自动引导车为人们研究重点,标识线图像识别导航方法的引导路径设置与变更比较容易,并且技术成本比较低,和其他视觉方法对比具备图像处理速度快、控制实时性良好的特点,逐渐成为自动引导车导航主要发展方向。车辆运动过程比较复杂,本文使用车辆系统力学模型作为车辆自动驾驶控制被控对象。图1为车辆系统动力学模型,x、o、y为地面固定直角坐标系,车辆运动模型表示为:
此系统输入量为{δ,Pf},指的是车辆方向盘转角与前轮驱动力,通过车辆动力学模型表示,中间量为{vξ,vη,θ},指的是车辆横向、纵向与角速度,输出量为{x,y,θ},指的是车辆在地面固定x、o、y直角坐标系横坐标、纵坐标与车辆前进方向和y轴的夹角,系统输入量取值范围为:
假设在车辆中安装基于机器视觉的车辆导航系统,视觉系统主要包括内部微机主板图像采集卡与CCD摄像机。车载CCD摄像机以路边和路面的路径标志线,对路面图像动态摄取,通过车载计算机对路径标志线处理和识别,传输到执行机构中,利用本文提出控制方法在道路种行驶。
2 车辆自动控制算法
智能车控制指的是对车速度与方向控制,因为视觉控制在控制智能车运动方面存在一定优势,所以使用视觉控制算法具有良好效果。在横向方面,能够控制车的方向,使用拟合后中心线和车的夹角θ和偏差r与车当前的速度三个变量构成两个模糊控制器进行控制。在纵向方面,控制车的速度,设计基于智能车的当前速度与转角作为输入模糊控制角。
2.1 方向控制算法
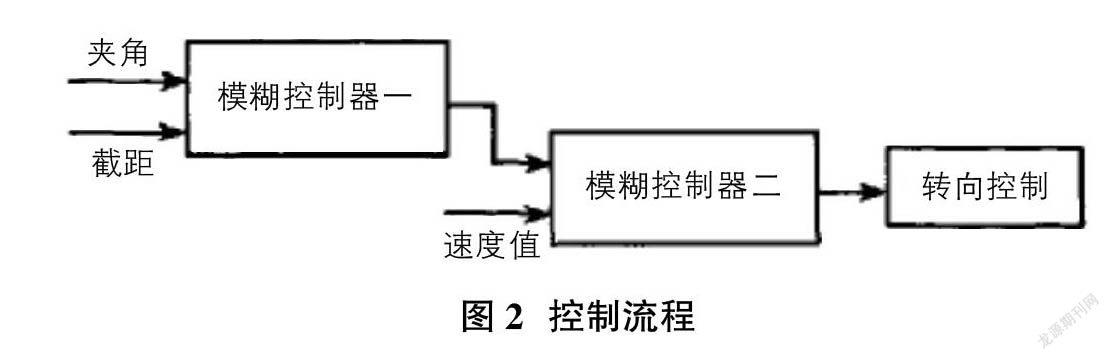
通过路径信息控制智能车的转向,本文使用截距和夹角作为模糊控制器输入,但是在世纪钟会导致拐弯处转向偏小或者偏大,主要是因为速度变化导致的。所以,要使用当前速度量构成闭环控制。在速度比较小的时候,基于原本基础减弱转向;在速度变化的时候,要加大转向,从而使智能车精准跟踪路径,图2为控制流程。
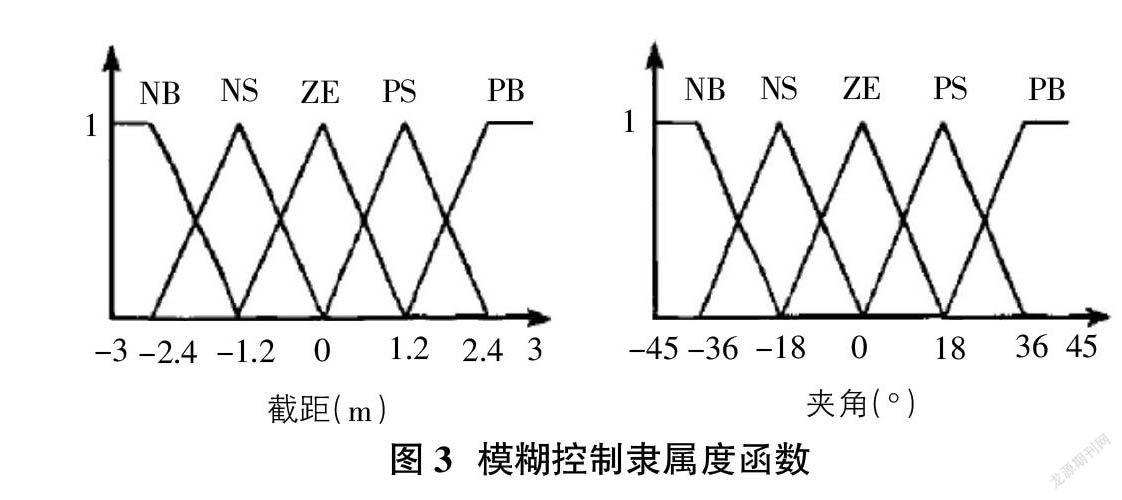
模糊控制规则库为模糊系统核心,针对车辆复杂系统来说,如何有效创建控制规则为模糊控制器重点。本文使三个输入隶属度函数使用三角形隶属度函数,针对模糊控制器,设置车辆截距r左偏位负,右偏位正,截距r论域为[-3,3],定义隶属度函数为NB负大、NS负小、ZE零、PS正小、PB正大,设置夹角θ偏左为负,偏右为正。图3为模糊控制隶属度函数,表1为模糊控制器规则表,模糊控制器输出angle0对应隶属度函数[LB、LS、M、RS、RB]和左大、左小、中间、右小、右大。
2.2 速度控制算法
由于角度控制量和车辆转角一一对应,所以通过角度量能够指导车辆转角大小,使车辆转牛角划分为左转极大、左转极小、中间偏左、中间偏右、右转极小、右转极大、右转较大。以道路实际情况,以小车速度在转弯最小速度值到直道中最大速度值包括速度极小、速度小、速度一般小、速度略小、速度略大、速度一般大、速度大、速度极大。模糊化使用三角形隶属度函数,输出隶属度函数使用单点值。表2为速度控制规则表,v0指的是当前速度,v指的是控制速度,angle指的是前轮转向角度。
2.3 视觉环境感知算法功能
①消失点检测。消失点为图像基本特征,不管是在直道或者弯道,都能够对道路前进方向进行指引,所以消失点能够作为路面显著点对车辆行进方向进行控制。消失点在环境感知算法的作用就是作为道路分割算法输入,对图像纹理取向进行约束。
②道路分割。车辆除了可行使的方向,还要道路路面区域信息。利用最大化贝叶斯后验概率密度估计区分图像中道路与背景区域,提供给智能车辆可供驾驶路线。
③障碍物检测。在真实道路环境中出现各种障碍物,障碍物检测模块能够提供给智能车辆障碍物尺寸、形状、位置等信息,以此规划无障碍路径。
④路径规划。路径规划属于智能车辆实现自主驾驶任务的主要构成,主要目的就是为智能车辆设计从起始位置到目标位置的路径,使车辆在运动时能够无障碍安全的沿着道路前行。
⑤车辆控制算法。设计智能车辆轨迹跟踪控制算法要对车辆在不同路况、载荷、风阻的干扰下进行控制,以环境传感算法得到信息,对当前位置与规划轨迹偏差进行确定,之后通过控制器纠正偏差,从而达到跟踪规划行车路线目的。
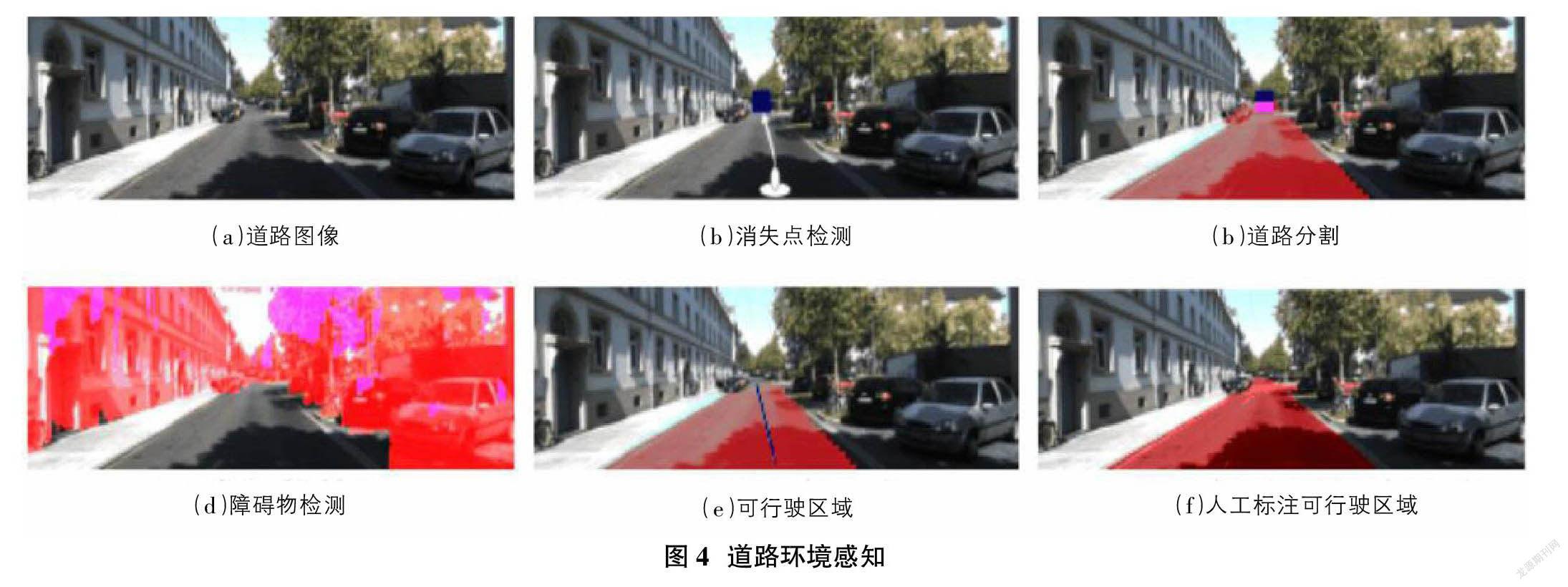
图4为道路环境感知,c指的是道路分割算法结果,红色区域为识别路面区域,并且车辆部分像素被误分割为路面区域;d指的是通过障碍物检测算法得到车辆顺利通过区域,粉红色与红色区域为障碍物,e指的是c和d的交集,也就是无障碍可行驶路面区域,还是环境感知模块输出,在路径规划模块中输入,直线表示无障碍可行驶区域和道路消失点指明方向规划行车路线,f指的是人工标注道路可行驶区域。
2.4 路径规划设计
利用A*算法规划无障碍初始路径,之后使用三次样条曲线优化,提高规划线路的平滑性。A*算法从起始节点利用启发式函数对相邻节点代价值计算,选择代价最优节点作为下一步的移动目标,从而不断循环,直到最终位置。所以,通过启发式函数对A*算法行为进行控制,定义为:
f(n)=g(n)+h(n)
其中h(n)指的是起始节点到当前节点n的实际路径代价,h为对角线函数,g(n)表示目前节点到指定目标节点估计路径代价。在规划初始路径前,使用A*算法实现障碍物与车辆实际尺寸的膨化处理,使车辆作为一个质点,安全区域为处理后障碍物边界以外区域,对避障运算简化。
A*算法规划路径为折线,对运动控制是非常不利的,所以使用三次样条插值实现平滑优化。取A*算法规划路径中的点构成N+1个控制点,生成N段三次样条曲线。假设t∈[0,1],所有小区间线段利用以下三次多项式进行表示:
通过此公式给定A*算法规划路线中N+1控制点和车辆起点与终点位置与姿态,确定经过平滑的路径。
3 道路驾驶仿真
为了对本文提出的控制方法有效性进行验证,本文在两条不同道路中进行仿真控制实验,一条为直路A,一条是直路加1个弯道B。以高速路单车道建设标准,使用道路路宽为4m。
3.1 路A的自动驾驶仿真
车辆的起始位置在靠近路面右侧1m的地方,车身的方向平行于路的方向,车辆起始纵向速度为5m/s,仿真步长设置为0.005s,图5为路A的仿真结果,通过一小段行程之后能够更好的逼近路的中线形式,而且汽车线速度不断增加,表示控制效果满足人工驾驶行为,控制效果良好。
3.2 路B的自动驾驶仿真
路B的初始直路为100m,之后为一个200m弯曲半径的做拐弯道。图6为路B的仿真结果,车辆在通过一段直路加速度之后进入到一个弯道中。因为这个时候车速比较大,车辆在拐弯的时候中心运动轨迹偏向路外侧,满足实际驾驶需求。在弯处时,车辆车速在不断的增加,拐弯的时候方向盘转角也在不断的变化,控制器对于车辆运动和车辆线速度、前轮驱动力控制效果良好,控制结果具有良好平滑性与平稳性。以此表示,本文方法所创建规则库具备优越性,能够满足车辆高速运动需求。
4 结束语
移动车辆为典型时延、非线性不稳定性系统,本文通过视觉方法解决车辆在道路中的自动驾驶问题。通过本文研究表示,本文提出控制方法能够对车辆在道路中安全行驶进行控制,并且具备良好鲁棒性。另外,在车辆方向控制与速度控制方面有效,具备良好推广与借鉴意义。
參考文献:
[1]崔勇强,陈锟,白迪,等.基于机器视觉的自动控制实验装置制作与应用[J].中国现代教育装备,2020(1).
[2]牟伦田,谢海涛,毛莎莎,等.基于结构化学习的车辆行为分析[J].交通工程,2019,19(04):31-38.
[3]龚龑,鲁啸.基于信息物理系统的自动驾驶车辆安全调速方法[J].城市交通,2020,018(002):118-126.
[4]侯岳青,徐贵力,朱仕鹏.基于视觉的车辆衡中轴型检测方法研究[J].计算机测量与控制,2020,28(09):59-63.
[5]岳俊峰,李秀梅.基于机器视觉的智能小车自动循迹及避障系统[J].杭州师范大学学报(自然科学版),2020,19(02):200-207.
[6]张海霞,李腆腆,李东阳,等.基于车辆行为分析的智能车联网关键技术研究[J].电子与信息学报,2020,41(1).
[7]颜佳桂,李宏胜,任飞.基于SSD和改进双目测距模型的车辆测距方法研究[J].激光杂志,2020,41(11):48-53.
[8]牟伦田,谢海涛,毛莎莎,等.基于结构化学习的车辆行为分析[J].道路交通与安全,2019,019(004):29-36.
[9]罗国荣,戚金凤.基于计算机视觉的自动驾驶汽车车道检测[J].北京工业职业技术学院学报,2020,19(04):40-43.
[10]王智,薛慧艳,孙迪,孟庆年,胡玉祥.基于视觉追踪技术的三维点云自动拼接方法及精度分析[J].测绘通报,2020(S01):4.
[11]李博威,侯明,蒋泽鑫.基于视觉的车辆控制系统设计与实现[J].传感器世界,2019,25(01):14-19.
[12]纪明君,陈新,李彪.基于机器视觉的自动驾驶原理及应用[J].北京汽车,2019(005):18-20.