基于LTE-V2X车路协同技术仿真验证方法的研究
2021-01-10 00:26胡鑫姜君苑寿同
汽车与新动力 2021年6期
胡鑫 姜君 苑寿同
摘要
智能网联汽车是我国战略发展的重点支持领域。车路协同技术是智能网联汽车的重要应用方向和基础支撑。车路协同仿真验证技术是车联网智能化基础设施建设及示范应用开展的重要保障。分析了车路协同系统发展的重要意义,研究了车路协同系统整体组成,软件仿真、硬件在环仿真以及整车在环仿真验证的仿真架构、设计方案及常用工具,提出了车路协同系统验证在协议一致性及应用功能验证层面存在的问题,总结了车路协同系统验证方法的发展趋势。
关键词
智能网联汽车;车路协同;软件仿真;硬件在环仿真
0 前言
车路协同系统(CVIS)是基于车际网、传感探测技术获取车辆和道路信息,并通过车车、车路信息交互和共享,实现车辆和交通基础设施之间的智能协同感知与配合,从而达到优化交通系统资源、提高道路交通安全、缓解交通拥堵的目标[1]。车路协同是车联网重要的应用方向和技术支撑。当前,基于智能网联汽车的车路协同技术正处于规模化测试和验证阶段,技术人员依托智能网联汽车示范区及车联网先导区,在全国范围内开展了围绕标准制定、研发测试、示范应用、商业落地等活动,对该技术进行了探索。车路协同技术在大规模实际商业化推广应用之前,需要在实际的道路交通场景下进行广泛的测试,以检验系统的安全性及稳定性。但这些测试场景成本高,具有一定危险性,重复性较差。因此,测试评价是开展车联网技术研发和应用不可或缺的重要环节,也是车联网基础设施及装备进行大规模部署,在智能网联汽车领域进行广泛应用的重要手段[2]。尽管现场操作测试和大规模部署已经在进行,但是LTE-V2X车联网的开发和性能评估仍然需要进行模拟试验。
1 车路协同系统仿真技术
车路协同系统包括车端、路端及云端。其中,车端主要是指安装在车辆上的车载终端,可以实时获取车辆状态数据,并与路端、云端通过通信网络交互数据。路端是指安装在激光雷达、毫米波雷达、摄像头、边缘计算单元、路侧单元等设备的具备感知、处理和决策能力的智能化路侧系统。云端是指可以实时采集车辆、道路及设备数据的云控平台。车路协同仿真技术重点模拟的是车端与路端的信息交互及应用场景的实现。车路协同系统仿真属于多系统仿真,涉及交通仿真、信息交互、测试、验证等问题。基于仿真验证目的不同,车路协同系统可以分为软件仿真、硬件在环仿真和整车在环仿真。
1.1 软件仿真
软件仿真是新技术进行验证和迭代的重要手段。车路协同软件仿真验证可以对车路协同系统架构进行快速验证。车路协同软件仿真一般由交通仿真和通信仿真组成。交通仿真器主要用于生成逼真的车辆运行轨迹,并将其用于网络仿真器的输入。常见的交通仿真器软件有SUMO、PRESCAN、CARSIM、VISSIM、TRANSIM等。网络仿真器主要用于实现面向车联网的通信协议栈,包括节点之间的交通数据传输、接收,以及后台负载、路由、链路和信道进行报文级别的仿真。网络仿真器包括QualNet、NS-2、NS-3、OPNET、OMNeT++等。
SCHILLER[3]提出了使用车载随意移动网络(VANET)的模拟方法进行应用程序的开发及功能验证。RIEBL[4]使用OMNeT++网络仿真工具搭建车联网设备通信模拟环境,采用SUMO软件提供车辆运动轨迹。技术人员通过这种测试环境可以模拟各种交通场景,并用于评估交通状况对通信信道的负载情况。但是,该测试环境与供应商提供的不同智能交通设备之间的兼容性欠佳。MATH等[5]针对交通密度和应用需求这2个层面,构建了网络模拟器(NS-3)和交通模拟器(SUMO)联合仿真环境,对公路场景进行了仿真。CHOUDHURY[6]设计了可以进行通信协议和应用程序的仿真环境,其中主要分为3个部分:交通仿真器使用的是VISSIM软件;网路仿真器使用的是NS-3;应用算法模块采用的是MATLAB软件。这种仿真环境是基于纯软件模拟,无法对物理通信过程进行测试,只能进行应用程序的核心算法及功能测试验证。软件仿真验证环境搭建较为容易,且其成本低,功能可扩展性强。但是,如果建立的模型与实际环境差异较大,仅依靠交通仿真模型和信息通信模型进行仿真,仿真验证的结果可能会出现错误。
1.2 硬件在环仿真
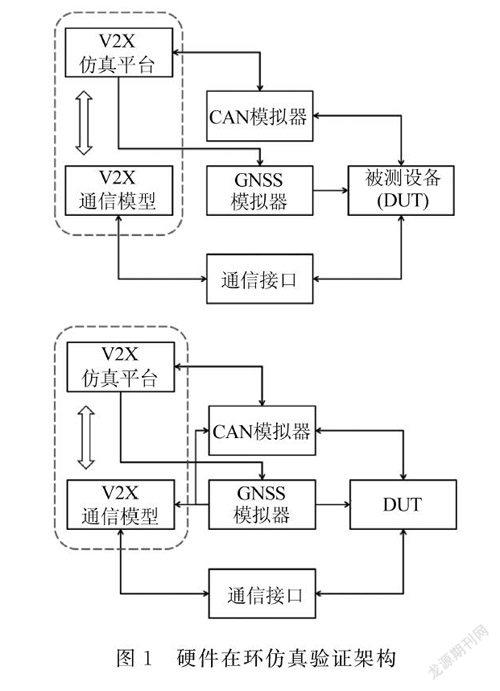
硬件在环仿真在传统汽车生产制造领域中使用广泛,同样也适用于车路协同系统的仿真验证。车路协同硬件在环仿真验证向被测设备(DUT)提供车联网仿真验证环境。NIRAV等[7]提出了OMNeT++HIL仿真的路由框架,检测OMNeT++的实时行为,重点测试了当节点拓扑开始改变时的场景。钟源[8]提出了基于Q-Paramics的交通环境搭建方法,并深入研究了针对功能测试、场景测试及全生命周期的车联网仿真需求。第3代合作伙伴计划(3GPP)提供了基于测试和测试控制表示法第3版(TTCN-3)与硬件系统模拟器相结合的测试系统。该硬件系统模拟器相当于1个完全可控的通信设备,技术人员可以根据测试用例通过自动或手动模拟通信过程对被测设备进行全面测试。WANG等[9]通过通信设备取代网络模拟器,构建实际的仿真架构,其主要是由GNSS模拟器、V2X通信模块、V2X仿真平台、控制器局域网络(CAN)模拟器及通信接口组成。整个仿真架构根据应用数据的不同分为2类,分别为由V2X仿真平台发送数据,并结合了全球导航卫星系统(GNSS)的模拟器数据及CAN模拟器数据(图1)。该框架结合了实际通信模块,但接口较为复杂,缺少验证结果的分析模块。蔡之骏[10]提出基于SIMULINK软件的V2X硬件在环仿真测试系统。V2X设备通过CAN总线与仿真模型和车机显示屏交互,模拟前装车载单元(OBU)实车的工作环境,测试系统使用GNSS模拟器模拟真实全球定位系统(GPS)信号,实现轨迹模拟及时钟同步,同时仿真系统加入驾驶模拟器,实现V2X驾驶员在环仿真。白杰文[11]采用了CarMaker軟件进行仿真场景搭建,配置交通对象参数,设计人机交互(HDU)系统,采用地图映射模型进行轨迹仿真,开发车联网在环仿真应用测试方法和车联网应用层标准一致性测试方法。
1.3 整车在环仿真
在车辆动态特性及人机交互模拟等方面,软件仿真和硬件在环仿真与实际状态仍有较大差异。相对于封闭场地测试,整车在环测试结果与实际环境测试结果最为接近,且成本及危险性比实际环境测试验证要低得多。WANG[12]提出了1种平行测试方法,用于测试通信过程,以及在车联网中的应用。在该测试方法中,虚拟测试车辆通过增强现实(AR)技术、传感器模拟、映射模拟器等方式实现了与测试车辆及模拟驾驶舱的通信,以及虚拟环境车辆与真实环境车辆的互通。
2 仿真方法存在的问题
车路协同系统软件、硬件在环及整车在环验证的核心内容主要围绕车路协同系统的协议一致性、应用功能2个层面进行分析。
协议一致性测试存在的问题主要有以下2方面。
(1) 缺乏自动化测试方案。C-V2X通信标准结构复杂,通信协议的一致性测试验证依赖大量测试案例,手动测试效率和准确率方面存在问题,需要自动化测试系统支撑。自动化测试系统可以在较短时间进行大量测试验证,节省时间且准确率较高,但是需要另外开发自动化测试验证设备及测试软件。测试过程越复杂,测试功能越丰富,开发量也就越大。
(2)测试用例标准有待完善。测试用例的数量,往往会对测试验证结果的准确性起到关键的作用。测试用例不仅需要涵盖标准涉及所有领域,而且需要根据特定的应用场景测试特定细节内容,如不同技术方案经度和纬度的表示和单位的换算。当前,通信协议主体框架虽然已经确定,但仍存在一些描述模糊的内容,需要规范和完善。
应用功能仿真测试则需要重点关注以下2个方面的问题。① 测试系统时间同步问题。车辆在运行过程中的速度较高,同时信息通讯频率也较高,车辆与外界系统通信时间不同步将导致应用程序错误。时间同步是测试系统构建及验证过程中面临的重要挑战。② 通信系统模拟延时问题。测试系统构建的通信模型,在仿真过程中会产生额外的延时,即模拟延时减去实际延时。如果存在较高的额外延时,通信模拟将不能反映实际情况。
3 结论
车路协同技术仿真验证方法是车联网基础设施规模部署,是开展智能网联汽车示范應用的重要手段。虽然基于实际道路环境的测试验证是最直接、最有效的测试方法,但是出于对成本及安全的考虑,基于仿真环境的测试验证方法具有不可替代的优势。本文分析了车路协同技术的软件仿真、硬件在环仿真及整车在环仿真当前的研究进展和主要思路,总结了协议一致性和应用功能验证方法存在的问题。智能化及网联化并行发展是我国智能网联汽车发展的技术路线。在国家政策的大力支持下,车路协同技术研发、标准制定、测试验证及示范应用将得到快速发展,测试验证技术作为重要的基础共性技术,将不断迭代,测试验证体系也将随之不断完善。
参考文献
[1]王云鹏.智能车路协同技术展望[R].第十二届中国智能交通年会,2017.
[2]ABOU-ZEID H,PERVEZ F,ADINOYI A,et al.Cellular V2X transmission for connected and autonomous vehicles standardization,applications,and enabling technologies[J].IEEE Consumer Electronics Magazine,2019,8(6): 91-98.
[3]SCHILLER M,ALOIS K. Emulating vehicular Ad hoc networks for evaluation and testing of automotive embedded systems[M].SimuTools: Athens,Greece,2015.
[4]RIEBL R,GNTHER H J,FACCHI C,et al. Artery: Extending veins for vanet applications[C].2015 International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS). IEEE,2015:2-4.
[5]MATH C B,LI H,GROOT S H,et al. V2X application-reliability analysis of data-rate and message-rate congestion control algorithms[J].IEEE Communications Letters,2017,21(6):1285-1288.
[6]CHOUDHURY A,MASZCZYK T,et al. An integrated simulation environment for testing V2X protocols and applications[J]. Procedia Comput. Sci.,2016,80: 2042-2052.
[7]NIRAV G K,SIVALINGAM M. Dynamic routing framework for OMNeT++ based hardware-in-the-loop (HITL) network simulation[C].2014 Twentieth National Conference on Communications (NCC),Kanpur,2014.
[8]钟源.车联网及车辆行为控制仿真方法研究[D].北京:北京交通大学,2017.
[9]WANG J,SHAO Y,GE Y,et al. A survey of vehicle to everything (v2x) testing[J]. Sensors,2019,19(2):3-34.
[10]蔡之骏,张莹,杨波,等. 基于Simulink的V2X硬件在环测试系统研究[J]. 汽车实用技术,2020(12): 87-90.
[11]白杰文. V2X车联网在环仿真平台关键技术的研究与设计[D]. 重庆: 重庆邮电大学,2020.
[12]WANG F. Parallel control and management for intelligent transportation systems: concepts,architectures,and applications[J]. IEEE Trans. Intell. Transp. Syst.,2010,11:630-638.
猜你喜欢
电脑报(2021年28期)2021-07-30
故事作文·高年级(2021年4期)2021-05-06
中国计算机报(2018年16期)2018-10-08
新能源汽车报(2018年40期)2018-05-14
中国计算机报(2018年42期)2018-01-31
中国计算机报(2018年41期)2018-01-22
创新时代(2017年10期)2017-11-09