基于Peak150控制的蒸汽透平典型故障分析及解决方案
2021-01-10 11:46:32刘海泉林万洲江敏
化工设备与管道 2020年5期
刘海泉,林万洲,江敏
(1. 中国石油西南油气田分公司,成都 610000;2. 西华师范大学电子信息工程学院,四川 南充 637002)
某天然气净化厂利用装置余热锅炉自产的中压过热蒸汽(4.0 MPa,360 ℃)作为驱动能源,驱动蒸汽透平带动半贫砜胺液泵,将半贫砜胺液由尾气处理单元输送返回脱硫单元主吸收塔,以此完成砜胺液的循环。单列处理装置共有2 台半贫砜胺液泵,1 台为电机驱动,1 台为蒸汽透平驱动,日常运行透平驱动泵,实现对装置废热的再利用,透平驱动泵联锁停机时系统可自动切换至备用电机泵。半贫砜胺液泵的蒸汽透平为美国埃利奥特公司生产,额定功率796 kW,额定转速2 980 r/min,搭配Woodward 公司生产的调速控制器Peak 150。Peak 150 作为蒸汽透平控制的重要组成部分,其可靠性直接决定蒸汽透平的运行稳定 性。
1 系统组成及控制功能
1.1 组成
透平调速系统由Peak 150 调速控制器(图1)、转速探头、带智能定位器的调速阀组成,如图2 所示,其中Peak 150 是以微处理器为中心的数字调节器,主要用于控制一个智能阀的蒸汽透平机组。
1.2 控制功能
Peak 150 调速控制器是一种功能强大的可编程控制,可实现逻辑控制和回路控制两种控制功能[1]。其内部是以32 位Motorola 68332 20 MHz 微处理器为基础的数字式调节器,采用手提式编程器,便于现场编程。Peak 150 使用的是模块菜单式驱动软件,编程较为容易。具有多个I/O 接口,便于功能选择[2]。
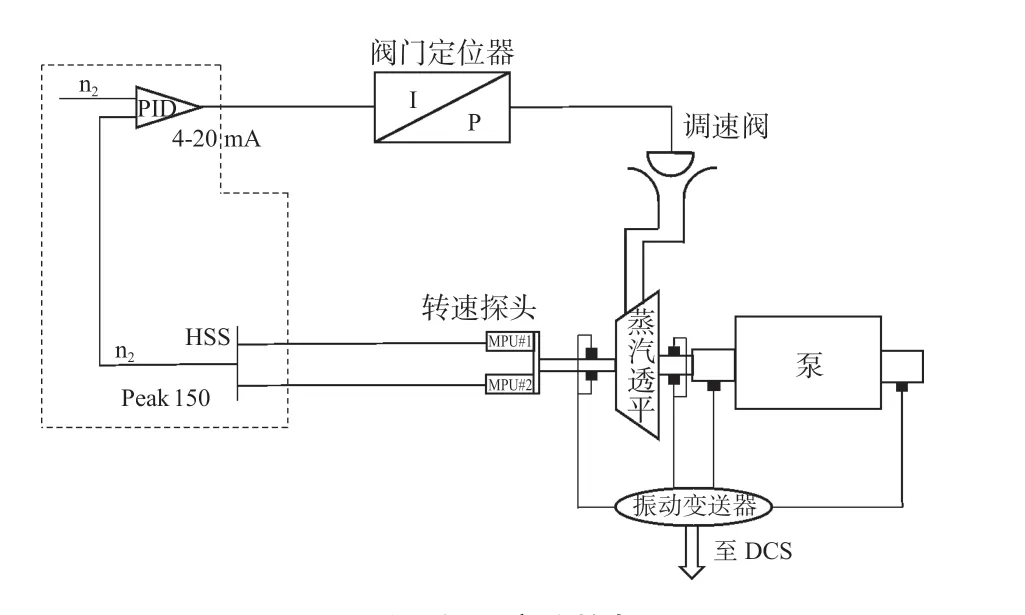
图2 调速系统结构框图Fig.2 The structure diagram of speed control system
1.2.1 逻辑控制实现启动控制和联锁停机控制
当蒸汽透平设为Peak 150 调速器自动启动时,调速器按照设定的转速升速程序(见图3),从暖机转速开始控制转速,在不用人工干预的情况下,自动升速到透平的额定运行范围。当透平设为人工启动时,操作人员可通过Peak 150 调速器操作面板控制透平升速到指定转速。
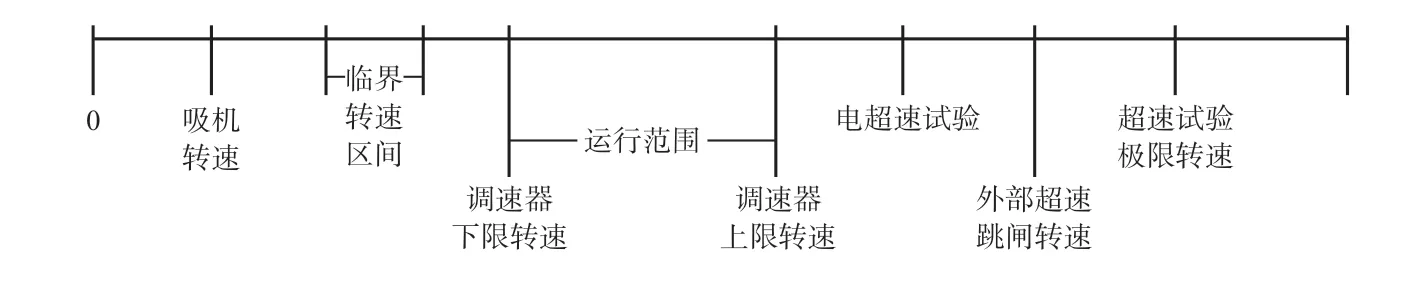
图3 蒸汽透平的转速变化线Fig.3 Steam turbine rotation speed curve
透平机组联锁停机保护控制包括超速停机保护、故障超驰保护和人工停机保护。超速停机保护是指在Peak 150 控制程序里设定了一个电超速转速值,当透平转速由于某种原因超出正常的运行范围,急剧升高到这个值时,Peak 150 立即发出停机指令,防止透平出现飞车事故[3];故障超驰保护是指当Peak 150 在有效时间内没有检测到超过最低转速时,发出的停机指令;人工停机保护指在异常情况下,操作人员可直接通过Peak 150 调速器操作面板的紧急停机按钮停 机。
1.2.2 PID 回路控制
透平定速以后可投入PID 控制。如图2 所示,转速PID 控制器接收n1和n2两个转速信号,其中n1是现场转速探头检测到的转速频率信号,n2为转速设定值。为确保转速测量的可靠性,现场设置了2 个转速探头,HSS 高选器选择正常的转速频率信号作为转速PID 控制器的测量值。PID 控制根据n1和n2之间的差值进行PID 运算,运算结果产生一个提供给带智能定位器的调速阀4 ~ 20 mA 的标准信号,使调速阀调节透平入口的蒸汽量,从而达到控制透平转速的目的。
2 典型故障现象与解决方案
2.1 控制器复位后有转速不能启动
当透平启动时首先需对透平控制系统进行复位,调速控制器Peak 150 输出最小电流值4 mA,使对应调速阀开度为0%。当调速阀的阀座与阀芯之间存在间隙时,蒸汽经过调速阀使透平在复位状态下仍有600 ~ 800 r/min 的转速,因此不符合透平启动的条件。
解决方案:要校验调速阀执行机构的连接部件,以确保在调用0%的执行机构位置时透平能停机;当调用 100%时可达到满负荷,即控制器在没有输出信号或输出最低电流4 mA 值时,调速阀仍然处于全关闭的状态;当输出20 mA 时,调速阀全开。
2.2 启机失败
2.2.1 假失速导致启机失败
透平速度传感器位于非驱动端,为磁电式速度传感器,共4 枚,用于监测主轴转速,见图4。它是利用电磁感应原理,在被测物体振动时,传感器内固定在惯性质量上的线圈切割磁力线,得到正比与振动速度的电势,该电势通过放大器放大。可测量被测物体的速度[4]。其中C2-1 位于正上方,信号接入就地转速显示器,不参与控制。C2-2,C2-3,C22 中的2枚传感器探头信号接入现场调速控制器和中控,2 选2 联锁,另1 枚探头备用,未接线。
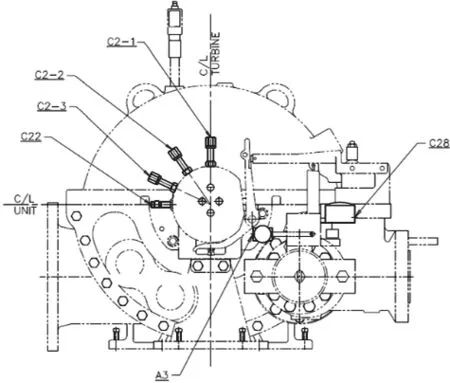
图4 透平速度传感器安装示意图Fig.4 Turbine speed sensor installation diagram
当启动透平时,调速器面板上没有速度显示(转速显示0),但实际透平处于运转状态,造成假失速,调速器在有限时间内无法获得传感器的速度值,触发透平联锁停机。
解决方案:
(1)检查速度传感器的连接线是否牢固可靠,确保信号通道良好。汽轮机组应选用高温型传感器、耐高温电缆,以提高传感器工作稳定性[5]。
(2)检查传感器安装是否到位。传感器探头与被检测齿轮齿间隙要求为0.040 in(见图5),其输出电压会受以下三个方面的影响:① 电压随着被监测磁性材料表面速度的增加而增加;② 当传感器与齿轮齿面之间的间隙增大时,电压减小;③ 电压波形是由齿轮齿的尺寸和形状、传感器探头杆件的尺寸和形状所决定的。
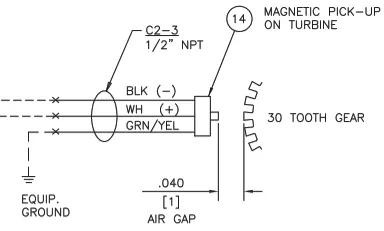
图5 传感器探头与被检测齿轮齿间隙Fig.5 The gap between the probe of sensor and gear tested
(3)清洁磁电式传感器探头上的污垢,同时也要清洁透平齿轮上的污垢,确保检测面的清洁。
(4)检查到磁电式传感器探头的磁性较弱时,则需更换新的传感器。
(5)测量速度传感器是否有交流电压值输出,有输出说明传感器工作正常。经实测,安装新的传感器后,转速越高,传感器输出电压越高,见表1。

表1 转速与交流电压值及频率表Table 1 Rotational speed and AC voltage and frequency
2.2.2 振动超标触发联锁
透平在启机过程中,当转速升至临界转速区(1 500 ~ 1 800 r/min)附 近 时,时 常 触 发 透 平驱动端振动超标联锁。该透平使用本特利内华达3300XLNSV 电涡流振动探头,电涡流传感器能测量被测物体(必须是金属导体)与探头端面的相对位置[6]。振动监测系统由探头、前置器、延伸电缆、变送器组成,主要是在线监测透平的轴位移量。两枚振动探头互呈90°安装,联锁值100 μm,以2 选2 的方式参与透平的振动联锁功能。
解决方案:
(1) 调整振动探头与主轴之间的间距。3300XLNSV 电涡流振动探头与被测金属导体的间距线性范围为1.5 mm(0.25 ~ 1.75 mm,直流电压约-13 ~ -1 V),实际应用1 mm,通过微调传感器使直流电压在-10 ~ -9.5 V。
(2)检测传感器的直流阻抗值,通过查询表2和表3 的数据表参数来判断不同长度传感器的好坏。选择延伸电缆的长度,应该使延伸电缆长度加探头电缆长度,与配套前置器所要求的长度一致(5 m 或9 m)[7]。
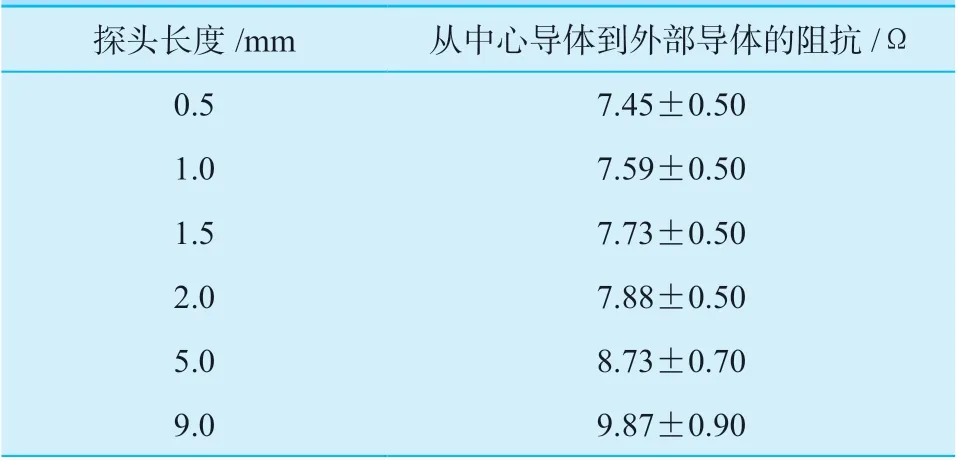
表2 探头额定直流阻抗表Table 2 Probe DC resistance
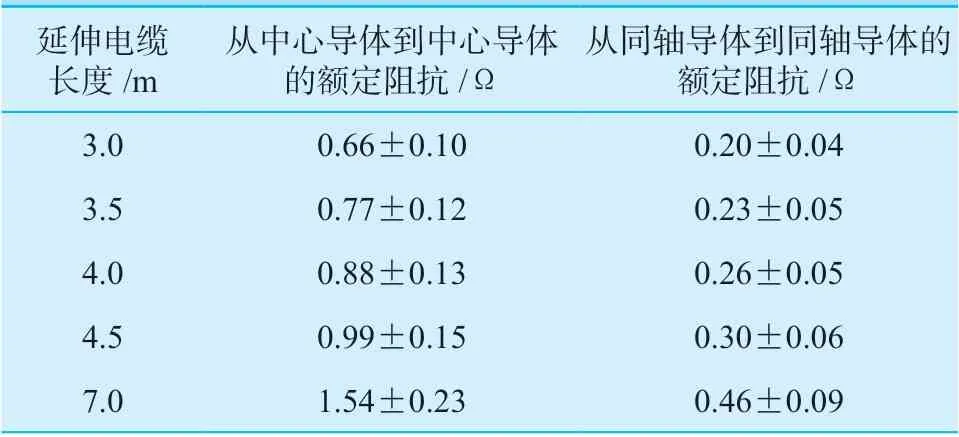
表3 延伸电缆额定直流阻抗表Table 3 Extension cable DC resistance
(3)若以上对传感器等仪表设施的检查均为正常,则说明振动检测性能良好,振动超标联锁的原因可能在透平的机械部分,需要检查透平联轴器是否对中,轴瓦有无磨损,转子是否存在动不平衡等问题。
2.2.3 控制器组态参数设置不合理
透平在首次启运前Peak 150 调速控制器必须针对特定的透平用途进行组态,组态菜单项目共计21项。当组态不合理时,就会影响透平的正常启运,在实际组态中遇到的典型问题和处理方式如下:
(1)故障超驰转速未在有限时间内超过最低转速而停机
超驰控制是把生产过程中的限制条件所构成的逻辑关系,叠加到正常的自动控制系统上去的一种组合控制方法,也就是系统中设有两个或两个以上的控制器,通过(高、低值)选择器选出能适应生产安全状况的控制信号,实现对生产过程的自控控制[8]。
为启动透平,MPU 信号故障停机作用被自动超驰,只要透平在启动所需的最大时间(Max Starting Time)内超过最低转速200 r/min,超驰功能就自动取消,否则透平将因转速信号丢失而联锁停机。通过故障超驰菜单中的参数(见表4),根据公式PRM=(Hz×60/齿数)计算出MPUs(MPU#1、MPU#2),将输入频率转换为转速。修改值是修改后的组态参数,将修改值300 Hz 代入该公式得出转速600 r/min,大于200 r/min,由于暖机/下限转速设置为500 r/min,透平很快由600 r/min 下降至500 r/min,因此将检测速度的启动最大时间由240 s 缩短为15 s。该菜单组态后,顺利启动透平至暖机转速500 r/min的阶段。

表4 故障超驰菜单表Table 4 Failed MPU override menu
(2)透平无法远程调速
正常情况下,当透平转速到达2 550 r/min 时,调速器将转速信号传输至DCS 系统开启远程调速模式(此时操作面板RMT 启用LED 灯由闪烁变为常亮),由DCS 系统在转速2 550 r/min 至3 100 r/min之间进行远程调节,此远程调速范围已在速度设置菜单中完成组态。若远程控制菜单参数设置错误,将导致透平出现能就地人工调速而不能远程调速的结果,设置参数详见表5。

表5 远程控制的整定菜单Table 5 Remote setting menu
Remote-Not Matched Rate 表示当远程控制信号与转速基准不匹配时,转速基准以此速率变化,但只在远程模式下才起作用;Remote Rate-Max 表示当远程控制信号与就地给定值一致,远程模式起作用时,给定值就以此速率变化。由于此两项变速率设置成0,使调速器的远程控制给定信号与透平的转速不匹配,调速器至调速阀的信号保持不变,失去远程调速的功 能。
为了实现远程对透平进行稳定的调速操作,对Remote-Not Matched Rate 与Remote Rate-Max 的参数值由0 修改为5 r·min-1·s-1,使调速器对来自DCS信号与透平的转速信号进行PID 运算,产生的偏差信号去控制调速阀的开度,从而实现远程调速功能。
3 结束语
通过对Peak 150 调速控制系统的组成和控制原理的深入了解,结合现场实际应用中出现的不同的故障现象,对振动探头、速度传感器、调速器组态参数等进行调整,并采取了一系列其他解决措施,使蒸汽透平恢复安全、稳定、可靠的运行,为同类设备的维护提供了一定的借鉴意义。透平的正常投用实现了对废热的充分利用,单台透平每年可节约电费300万元以上,经济效益显著。
猜你喜欢
现代仪器与医疗(2021年4期)2021-11-05 08:25:06
河北农机(2020年10期)2020-12-14 03:13:42
凿岩机械气动工具(2017年2期)2017-07-19 10:21:13
工业设计(2016年11期)2016-04-16 02:49:22
水电站机电技术(2016年1期)2016-02-28 14:21:36
汽车维护与修理(2016年3期)2016-02-28 13:17:07
合成技术及应用(2015年3期)2015-12-11 08:36:27
中国铸造装备与技术(2015年5期)2015-12-10 10:23:41
少先队活动(2014年6期)2015-03-18 11:19:18
水电站机电技术(2014年4期)2014-10-13 08:30:03