某型无人机滑跑中发生侧滑故障的分析与排除
2021-01-10 11:58:46陆志刚韩邦杰石家庄海山实业发展总公司空装驻石家庄地区军事代表室
航空维修与工程 2020年8期
陆志刚 韩邦杰/ 石家庄海山实业发展总公司 空装驻石家庄地区军事代表室
1 故障描述
正常情况下,无人机在地面控制站监视下可以自主完成起飞、爬升、巡航与进场着陆飞行全过程,飞行操纵员可以不对无人机执行任何操作。
工厂大修的某型无人机在外场进行自主飞行滑跑时,机体发生明显向右侧滑现象,滑跑路线已偏离预设定轨迹,飞行员随即进行了手动纠偏,在纠偏范围内,向左纠偏2°,无人机重回预设定轨迹,继续滑跑直至起飞爬升。若侧滑发生时未进行自主操纵转人工操纵,那么无人机极易右偏滑出跑道,导致地面事故的发生。
2 原理分析
无人机液压系统主要由回油油滤、电动泵组、油箱、组合阀块、刹车作动器、前/主起落架收放作动筒等部件组成,如图1 所示。在液压系统正常的情况下,采用液压系统可以进行起飞、着陆和刹车。自主操控状态下,机体出现侧滑现象,可以转人工操纵,对前轮进行纠偏控制,前轮纠偏权限为:地速小于或等于90 km/h、三个机轮都可靠接地的情况下,纠偏限制为±5°;在三个机轮都可靠接地至地速大于90km/h 的时间内,纠偏限制为±3°;在单个机轮可靠接地至三个机轮可靠接地的时间内,纠偏限制为±1°。
该型无人机采用简单的机械式刹车系统,无防滑功能。为防止刹车盘抱死,采用2.5MPa 低压体制,如图2 所示,在启动电机前保持变压电磁阀(6.3)处于不通电的油路常通状态。
根据图2 所示的液压刹车原理,液压系统输入的压力油经过组合阀块(6)中的2 个刹车电磁阀进入左右刹车作动筒(7)。两个刹车电磁阀分别由飞控系统控制,可实现差动刹车或同时刹车。当电磁阀(6.6)断电时,刹车腔通过电磁阀与回油管路连通,刹车作动筒(7)不工作。当电磁阀(6.6)通电时,刹车腔通过电磁阀与液压供压管路连通,刹车作动筒工作,进行刹车。
3 故障分析
由于该无人机在自主滑跑时出现右偏侧滑的现象,而人工操纵介入手动纠偏可以消除侧滑故障,说明无人机液压系统、刹车系统、起落装置系统均有可能出现故障。对比分析飞参数据后,将故障现象“机体侧滑故障”设置为顶事件建立故障树,如图3 所示,对各种可能的结果事件和底事件进行分析。
3.1 装配工艺问题分析
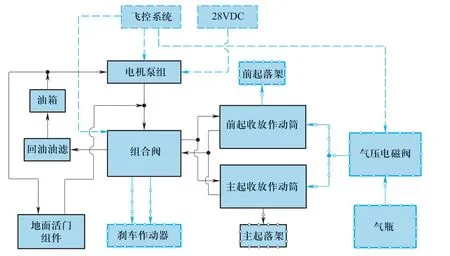
图1 液压系统构造图

图2 液压系统原理图

图3 故障树示意图

图4 刹车片安装示意图
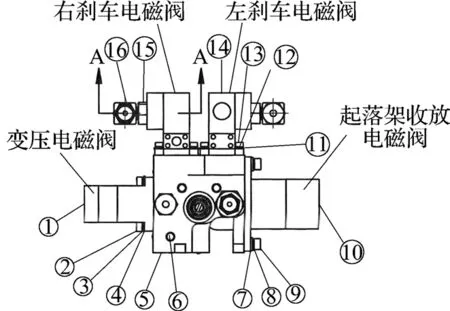
图5 组合阀块示意图
1)该型无人机使用300×125-90无内胎轮胎,机轮主要由轴承挡油环、轴承内环、轮胎、气门芯组成,组装后再置于起落架上。机轮安装时,工艺要求将其置于垫有橡胶板或其他软质材料的平台上进行操作,否则安装过程中可能出现硬力损伤,同时自锁力矩拧出最小力矩要高于0.2N.m,若安装不符合规定要求,则可能引发机体侧滑故障。
2)刹车片安装如图4 所示,刹车缸体用连接刹车缸体和主支柱下段的两颗螺钉连接固定,刹车盘卡在两个刹车片之间,刹车缸体的安装孔对准支柱下段的安装孔由螺栓连接固定,且组件、各轮轴活动部位需涂ZN6-4 润滑脂来润滑。若安装过程中连接固定达不到工艺标准、活动部位缺少润滑脂,则可能影响刹车片正常工作,最终引发机体侧滑故障。
3.2 刹车压力故障分析
1)工艺文件中规定轮胎充气压力为0.65±0.05MPa,若充气压力低于或高于规定值,则造成胎压不足或过量,两侧胎压不一致可能导致机体滑跑时发生侧滑。
2)刹车片本身存在一定的摩擦力。主机轮的刹车片和摩擦力都需要进行定期检查,保证刹车力矩稳定。如果刹车片摩擦力过大,可能导致机体发生跑偏引发侧滑。
3)如果工作时组合阀块出口压力不一样,则左右刹车压力不一样。如果左右刹车压力压差过大,就会造成左右刹车压力过大,具体表现为机体发生侧滑现象。
4 故障排查与定位
4.1 故障排查
针对以上故障树及原因分析,开展了如下工作。
1)取下轮胎和密封圈外观检查,发现分解下来的零组件均无漆层脱落、损伤、严重变形等现象。观察轮毂的外型面、接合表面和密封圈安装表面均无碰伤、划伤。
2)检查支柱及机轮轮胎与相邻结构间的间隙,已满足要求不小于5mm、局部不小于2mm;仔细检查刹车片,发现刹车片无毛刺、掉块、龟裂,刹车片上的钢骨架也没有出现裂纹,刹车片安装无异常。
3)用千斤顶将飞机顶起至轮胎离地,前、主支柱处于放下状态时,检查左、右轮胎压力,显示轮胎压力正常。
4)检查刹车盘和刹车片无明显的毛刺和形变现象,配合无异常情况;进行刹车测试,刹车力矩在规定范围内;进行PMA 液压刹车检查,给液压系统上电,在左下显的“飞行前检查”界面中“液压泵及刹车系统”菜单下按“液压泵启动”指令,检查发现刹车压力均在范围内,无异常。
4.2 故障定位
综上分析,刹车出现问题导致刹车压力过大,初步判定是组合阀块故障造成机体发生侧滑。
如图5 所示,组合阀块内含有刹车电磁阀,变压电磁阀转为常开状态,向刹车电磁阀供额定工作电压28VDC,左右管嘴分别接左右刹车,向进油管嘴供额定工作压力10±2MPa,电磁铁通电,左右刹车压力应为3±0.5MPa。协同动作时间检查(在电磁阀入厂复验时进行),从刹车电磁阀接通或断开到对应管嘴的压力开始上升或下降的时间,常温时≯0.1s,低温-55℃时≯0.2s。
经检查发现,刹车电磁阀的协同动作时间均符合标准,但是左右刹车压力压差很大,左刹车压力值靠近下限,右刹车压力值靠近上限,造成了左右刹车压力差值较大,最终引发了机体侧滑。
5 措施与结论
根据上述研究,制定以下预防措施。
1)因工厂无此产品专用压力调节设备,与制造厂沟通合作,派专业人员赴制造厂参与外委产品的验收试验,保证产品左右压力均衡。
2)无人机地面总装调试后需进行C链路测试,以地面控制站反馈的正常链接静态下的左右刹车压力值作为参考,若压差过大,则机件返厂重新进行压力调节。
3)加强车间对外委产品修理的接收检查,开展技术攻关,逐渐形成自修能力。
执行以上控制措施后,后续无人及经外场开车和试飞未出现机体侧滑故障,使用状态反馈良好。
猜你喜欢
湘潮(上半月)(2022年7期)2022-12-06 03:35:08
低温与特气(2022年2期)2022-11-26 08:07:41
哈尔滨轴承(2021年4期)2021-03-08 01:00:50
铝加工(2019年5期)2019-02-08 23:18:48
人民交通(2015年2期)2015-12-02 03:20:24
科普童话·百科探秘(2015年6期)2015-10-13 07:05:15
伴侣(2015年5期)2015-09-10 07:22:44
大众科学(2015年10期)2015-09-10 07:22:44
橡胶工业(2015年7期)2015-08-29 06:33:00
科技视界(2015年27期)2015-06-16 02:20:00