
物流无人机PID控制研究
2021-01-08 02:16陈鹏李子卓李陈龙宋昊铭吴心雨迟英姿
无线互联科技 2021年23期
陈鹏 李子卓 李陈龙 宋昊铭 吴心雨 迟英姿



摘 要:当今物流行业发展迅速,无人机技术日趋成熟。文章对网联化、智能化新型物流配送方式展开探究,研究了无人机的PID调试方案,分析了无人机不同起飞重量下的飞行姿态,优化特种无人机的姿态控制及其产品的实用性。
关键词:PID;无人机;物流;改装
1 物流无人机的发展现状
无人机技术日趋成熟,无人机的应用逐渐广泛,物流行业快速发展过程中,无人机的优势也逐渐显现出来。
本项目应用于物流需求,为确保能够快速准确地将货物送达目标位置。对配送流程进行优化[1],缩短货物送达时间。相对于地面物流系统,在配送时间、环节、人力成本等方面得到明显优化,从而提高总体配送效率。两者配送流程对比如图1所示。
2 无人机硬件参数
无人机采用六旋翼无人机[2],轴距850 mm,电机采用 3 510 360 kv,旋翼尺寸1 555 mm,电池选用6 s 16 000 mAh,空重3.36 kg,最大载重4.2 kg,物流箱容量29 L。
3 物流无人机的PID控制
3.1 物流无人机的PID调试方案与分析
多旋翼无人机PID 是控制无人机飞行姿态的重要参数,其作用是消除飞行器输出值在理论值与实际值之间的误差值。本文使用MP地面站对六轴无人机进行可视化PID调整。
PIXHAWK飞控采用串级PID的方式[3],外环PID控制角度,内环PID控制角速度。内环PID更直接作用于电机,所以在多旋翼无人机姿态调试中,一般只调试内环PID。
P比例可以理解为修正力度,P值越大则修正力度越大,系统响应速度越快,P值过大也会导致系统振荡失调。D微分的作用可以理解为刹车,在系统即将恢复至目标值时降低修正力度,以减少系统修正次数,使系统快速达到稳定。I积分的作用是消除静态误差,以使系统处于稳态时不振荡。
通过对无人机ATT数据分析,得到无人机Pitch轴在PID调试前的姿态变化,如图2所示。由图2可知,PID调整前,Pitch轴的实际值与期望值误差较大,无人机飞行姿态不稳定。
为了达到无人机稳定飞行的目的,PID的整定过程通常需要经过多次调试。本文六轴无人机的PID具体整定方案为:
(1)将P比例、I积分、D微分降低至最小值,逐步增加P值,每次增加0.002,直至系统出现不衰减振荡,降低P值0.002,直至系统出现衰减振荡。
(2)保持P值不变,逐步增加D值,每次增加0.001,可观察到系统的衰减振荡次数逐步减少,直至系统出现振荡,降低D值0.001,直至系统不振荡。
(3)保持P比例、D微分不变,逐步增加I值,每次增加0.002,直至系統与期望值静态误差降至最低。
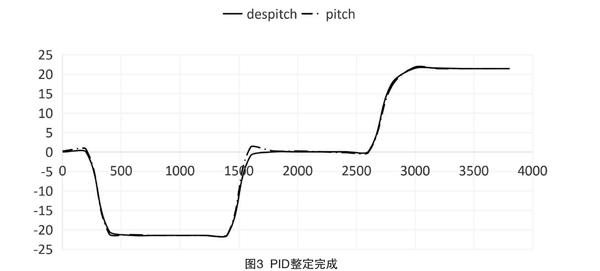
(4)根据无人机飞行姿态,对P值、I值、D值进行微调,直至系统稳定,无人机飞行姿态良好,完成PID整定(见图3)。
3.2 不同起飞重量下姿态对比
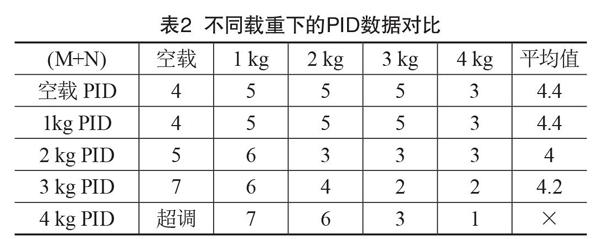
因物流无人机载重变化,在不同起飞重量下,PID有差异,需整定PID适应不同起飞重量,对比不同起飞重量PID在不同载重时飞行姿态的差异,可参考 PID曲线分布等级表(见表1)。
由表2分析得,4 kg PID在无人机空载时处于超调状态,飞行状态极不稳定。对各组PID在不同载重情况下的数据对比,2 kg PID在各载重下飞行状态良好。
4 结语
本项目主要提出了一套关于六旋翼物流无人机PID的调试方案,并对不同载重情况下的PID数据进行了对比。该项目有助于优化特种无人机的姿态控制及其产品的实用性。具体结论如下:
(1)阐述了P比例、I积分、D微分在无人机姿态控制中的具体作用,并且针对其特性,提出了一套切实可行的调整方案。
(2)对于物流无人机的不同起飞重量,进行了多组PID在不同起飞重量下的数据对比,并得出了一套相对稳定的PID数值。
[参考文献]
[1]刘正元,王清华.无人机在应急物流配送中的任务分配模型构建[J].科技管理研究,2020(24):229-236.
[2]胡瑞,许春霞,熊乐,等.三轴矢量无人飞行器的创新设计与研究[J].机械设计与研究,2020(5):54-59.
[3]赵洁,陈至坤,张瑞成.基于串级PID的多旋翼精确定点悬停控制研究[J].电光与控制,2021(5):1-6.
(编辑 姚 鑫)
Research on PID control of logistics UAV
Chen Peng, Li Zizhuo, Li Chenlong, Song Haoming, Wu Xinyu, Chi Yingzi
(Institute of Automotive Engineering, Pujiang College of Nanjing University of Technology, Nanjing 211100, China)
Abstract:Nowadays, with the rapid development of logistics industry, UAV technology is becoming more and more mature. This paper explores the networked and intelligent new logistics distribution mode, studies the PID debugging scheme of UAV, analyzes the flight attitude of UAV under different takeoff weight, and optimizes the attitude control of special UAV and the practicability of its products.
Key words:PID; drone; logistics; modification
猜你喜欢
物流技术与应用(2019年8期)2019-09-04
汽车观察(2018年12期)2018-12-26
消费导刊(2018年8期)2018-05-25
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
