基于FRAM的塔吊作业系统安全管理分析
2021-01-08 08:10:20赵挺生胡俊杰师玉栋
工程管理学报 2020年6期
赵挺生,胡俊杰,师玉栋,徐 凯
(华中科技大学 土木与水利工程学院,湖北 武汉 430074,E-mail:mrshi@hust.edu.cn)
塔式起重机(以下简称塔吊)是施工现场重要的垂直运输设备。塔吊在施工现场的全寿命周期,可分为安装、顶升、使用和拆卸4个阶段,且顶升阶段与使用阶段互相重合。在这4个阶段中,使用阶段的持续时间最长,并以吊运作业为核心功能。据不完全统计,2010~2019年,我国至少发生了382例塔吊生产安全事故,其中能够区分事故发生阶段的有344例,发生在塔吊使用阶段的事故最多,共207例(占比54.2%),使用阶段是塔吊生产安全事故的高发阶段[1,2]。因此,研究塔吊使用阶段的作业安全管理问题具有重要意义。
分析塔吊事故数据和塔吊安全影响因素,是改善塔吊安全管理的基础。目前,关于塔吊安全事故与安全影响因素的研究成果丰硕,研究者广泛采用理论分析、事故统计、数据分析等方法,识别塔吊安全影响因素,深入探讨因素特性,为塔吊安全管理提供了重要参考。丁科等[3]将塔吊安全风险因素进行了归纳分类,确定了风险因素的相对发生概率。Raviv等[4,5]建立了塔吊未遂事件与事故的结构化数据库,以 AHP方法为依托,对各集群的风险程度进行了量化分析。目前鲜有针对塔吊使用阶段作业安全问题的系统性分析研究,但部分研究已经引入了系统性事故致因模型,如 Zhou等[6]识别了56项塔吊安全影响因素,建立了塔吊安全的AcciMap模型,提取了关键安全影响因素。功能共振分析方法(Functional Resonance Analysis Method,FRAM)是丹麦学者Hollnagel[7]在2004年提出的一种系统性事故致因理论,它以了解系统正常运行情况为基础,进而解释系统未能正确运行的原因。该方法已经在系统风险与事故分析中表现出较强的解释力度。张晓全等[8]、甘旭升等[9]利用FRAM建模解释事故致因机理,识别了事故防控要点。Tian等[10]提出了一种改进的 FRAMA(FRAM-based Analysis)模型,对模型功能变化进行格式化描述,从而实现功能变化耦合的穷举搜索。Patriarca等[11]针对传统FRAM缺乏量化能力的问题,将蒙特卡洛分析方法与FRAM结合,提出了一种半定量分析的框架。因此,利用FRAM分析塔吊作业系统,有望从系统功能角度深入理解塔吊作业安全问题,指导塔吊作业安全监控。
本文从塔吊作业功能视角出发,利用FRAM对塔吊作业系统进行建模,对塔吊作业安全系统功能变化耦合过程实施定性和定量分析,识别影响塔吊作业系统安全的关键功能和功能变化耦合路径,计算功能耦合关系的相对重要性评分,进而提取塔吊作业安全监控重点内容。
1 FRAM 建模与功能变化识别
1.1 塔吊作业过程分析
分析塔吊作业过程是识别塔吊作业系统功能和分析功能变化的基础。基于在某工程设备管理公司和某桥梁建设项目开展的实地调研访谈,结合《塔式起重机操作使用规程》(JG/T 100-1999)[12]、《建筑施工塔式起重机安装、使用、拆卸安全技术规程》(JGJ196-2010)[13]和《起重机械安全规程》(GB 6067-2010)[14]等塔吊相关标准规范,参考江汉TC6013-8型塔吊、华诚机械QTZ63(5510)型塔吊和中昇建机ZSL750型动臂式塔吊使用说明书,对塔吊作业过程的主要活动及其相关要求进行梳理,结果如图1所示。
1.2 塔吊作业系统FRAM建模
作业过程分析属于任务分析是功能识别的基础。任务是预期实现的、理想化的功能,且在时间顺序、控制关系等方面具有一定的结构;功能本身并无顺序之分,其相互关系通过特征之间对应关系进行表达。识别系统功能,即研究系统正常运行,了解系统常规活动。在系统功能分析上,FRAM建模的抽象层次从高到低分为功能性目的、抽象功能、广义功能、物理功能和物理形式等5个层次,高层次功能是低层次功能的抽象。
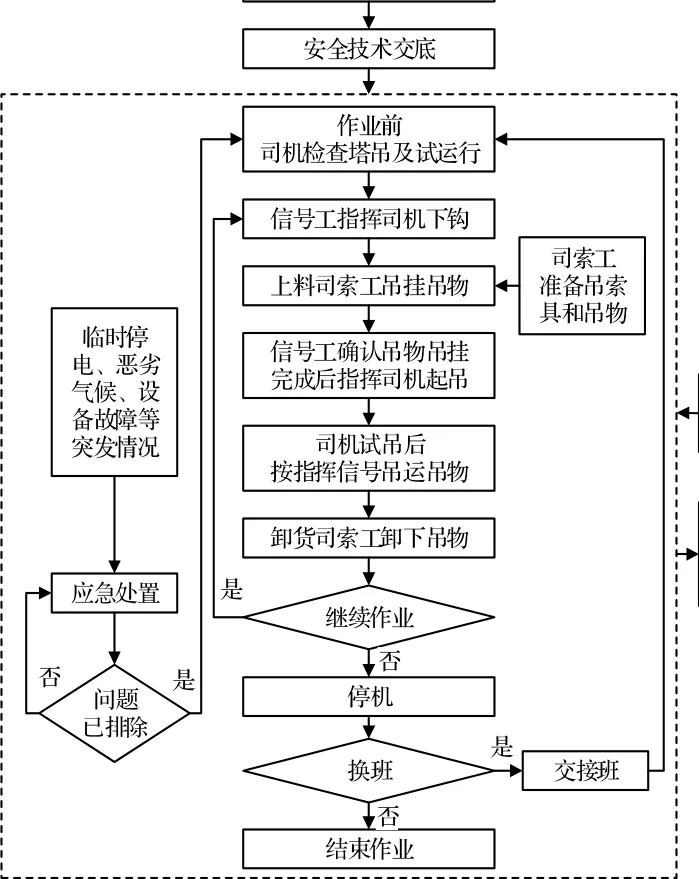
图1 塔吊作业过程
FRAM将功能分为前景功能和背景功能,其中前景功能是分析焦点,背景功能用于向前景功能提供条件和环境。功能之间不存在优先级或顺序的区分。每个功能用表1所示的6项特征进行描述,特征一般为名词短语。为满足模型的一致性要求,不同功能中的同一特征应当具有一致的命名;同时,模型的完整性则要求任何功能的任一特征均应在其他功能的特征中有所对应。另外,FRAM也提供了一种图形化表示方法,用六边形表示一个功能,每个角作为一个特征,如图2所示。
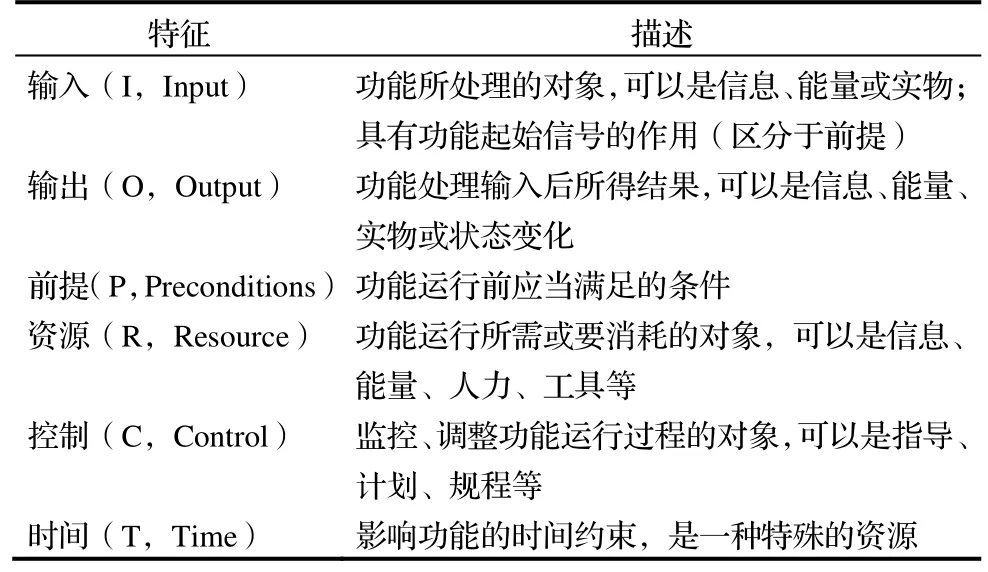
表1 功能的6项特征
从物理功能层出发,分析与人机交互密切相关的系统功能。对于塔吊作业系统,其整体功能目的是将材料、工具、设备等物料从某个位置吊运到目标位置。因此,以核心功能“吊运”为分析起点,描述该功能的6项特征,如图3所示。
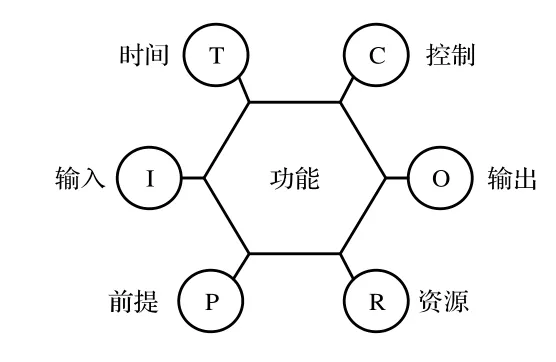
图2 功能的图形化描述
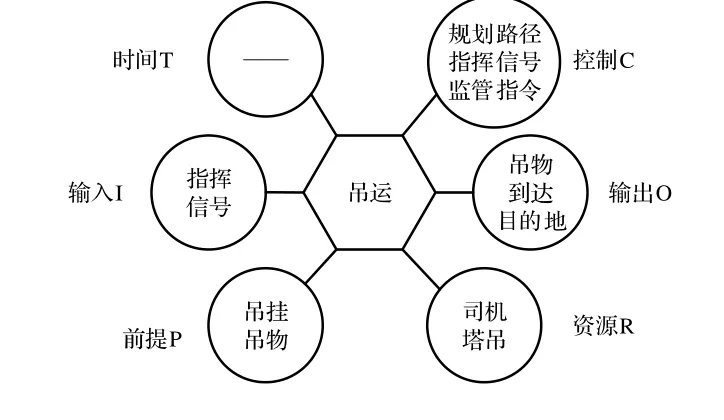
图3 “吊运”功能的特征
核心功能“吊运”的各项特征必须与至少一个其他功能的某个特征相对应,从而识别出其他功能,如提供指挥信号的“信号指挥”功能,提供司机的“司机就位”功能等。结合上述分析结果,得到塔吊作业系统的功能及其特征,如图4所示。再以“吊运”这一核心功能为起点,利用可视化软件FRAM Model Visualiser进行建模,形成塔吊作业系统的FRAM模型,如图5所示。

图4 塔吊作业系统功能及其特征
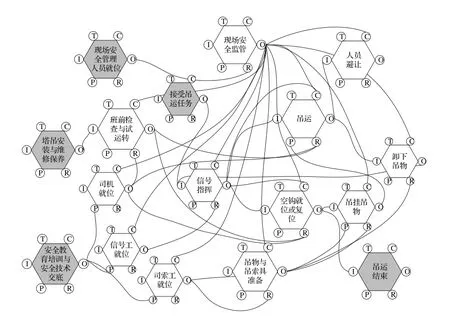
图5 塔吊作业系统的FRAM模型
2 塔吊作业功能变化耦合分析
功能变化耦合分析是研究系统出现异常状态时,系统各功能可能处于的变化状态,并分析这些功能变化耦合导致系统异常的过程。在FRAM模型实例化后,可以从时序或因果关系的角度理解系统功能间的关系[7]。
2.1 塔吊作业功能变化识别
根据收集到的2016~2019年间的68篇塔吊使用阶段生产安全事故报告,对塔吊作业过程中的 7种常见事故类型(吊物坠落、高处坠落、倒塌、塔吊碰撞、吊物钩挂、吊物挤撞、零件掉落)定义,按事故直接起因对事故进行分类。并统计各项功能在不同事故类型中,以异常变化形式参与事故涌现的频次及频率,对具有不同描述的类似功能变化进行合并,并按变化程度进行初步分类。
事故过程中的功能变化是系统功能的表现,根据近似调整和成败等价原理,还应关注系统正常工作状态下以及导致未遂事件的功能变化。具体地,以事故案例分析提取的功能变化为基础,补充识别功能的潜在变化,并按其变化程度分类(参考LEC法进行,采取一种相对描述方法,按可能性由高到低设置4种评价:“往往如此”“可能的”“偶尔的”和“罕见的”)。
基于现场调研和对事故调查报告的分析归纳,初步判断各功能变化发生的可能性。依托某垂直运输设备安全监控联合研究基地,邀请具有丰富塔吊管理经验的2位专家(10年和7年工作经验)和4位一线技术管理人员(3~4年工作经验)参与调研,获取专业技术人员关于各功能变化发生可能性的隐性知识。参考《建筑施工安全检查标准》(JGJ 59-99)[15]中,对专职安全管理人员和其他人员检查评分的赋权方案,使每个专家的权重为 0.6,一线技术管理人员的权重为 0.4,计算功能潜在变化在不同发生可能性上的加权总分,最后作归一化处理,评价结果如表2所示。表中,初步判断结果是本文基于现场调研和事故案例分析形成的主观观点,专家评价结果则以其工作经验为依据,两者在部分功能潜在变化发生可能性方面具有不同的认识。后续量化分析时,将分别按两种评价结果进行计算,并作比较分析。
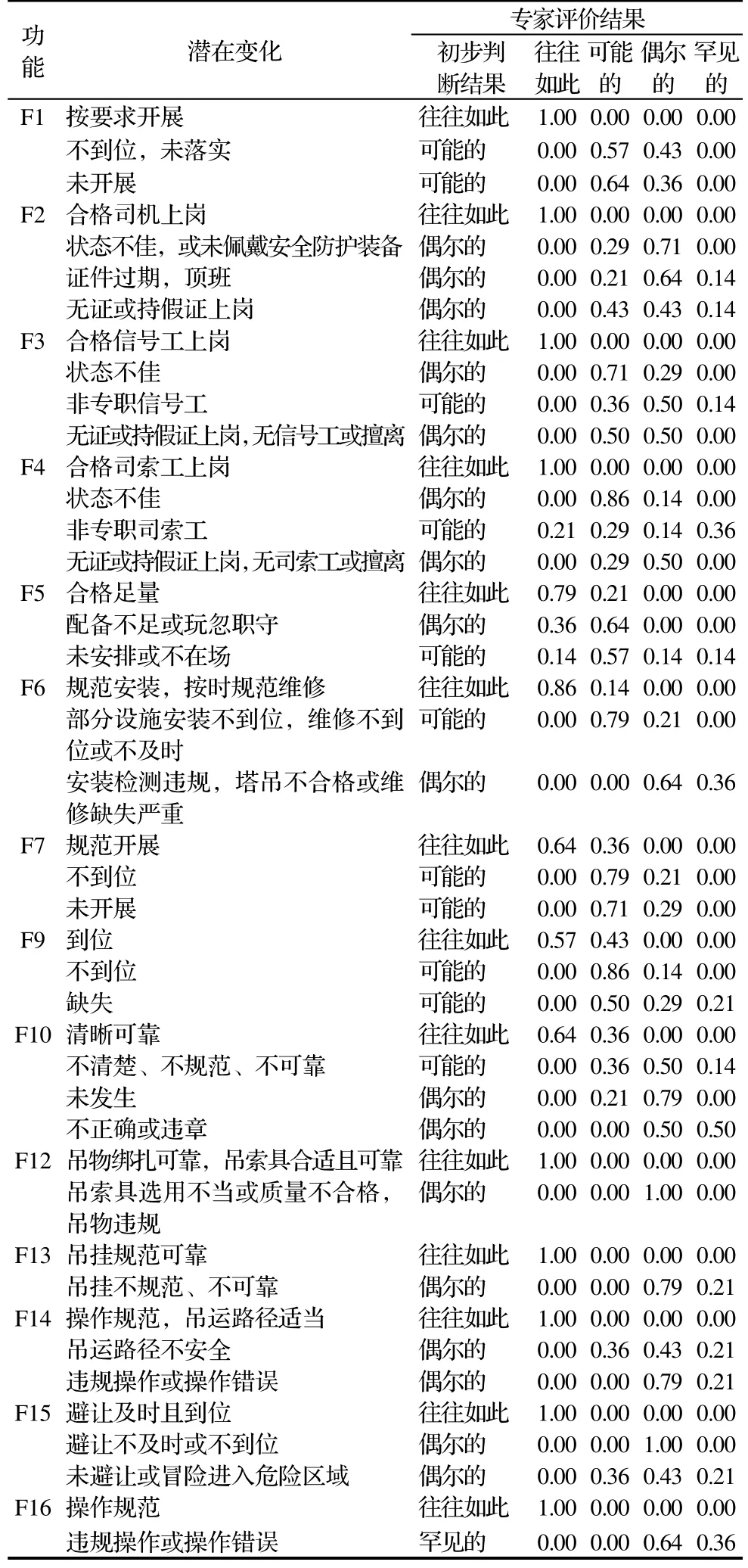
表2 功能潜在变化及其发生可能性
2.2 定性分析
定性分析是FRAM的典型分析手段,有助于更全面地理解事故的涌现过程。结合事故案例研究,从塔吊作业系统的典型安全事故类型出发,按各事故类型的主要事故形式,分别探究事故涌现过程。综合来看,塔吊作业系统有3种事故形成路径类型,如表3所示,多数事故是多项功能变化耦合作用的结果,包括多项功能变化的因果关联和多项功能变化的共振。
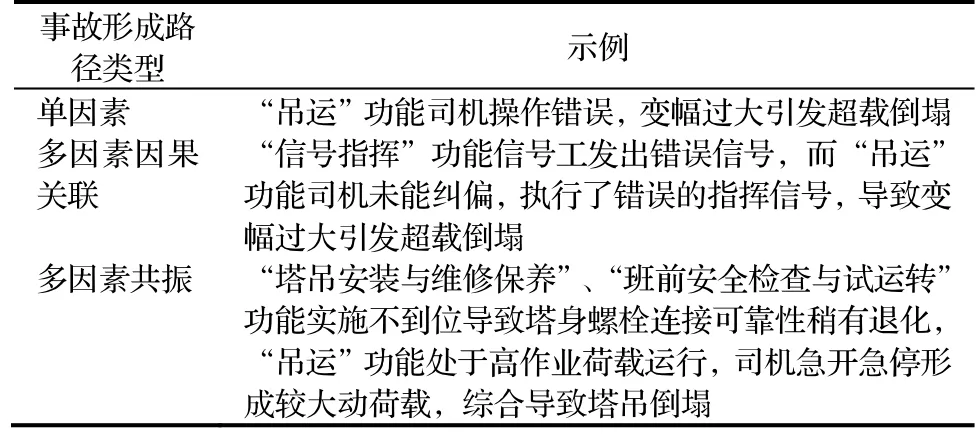
表3 塔吊作业系统的3种事故形成路径
从功能特征来看,“吊运”功能的输入、前提、资源和控制特征达6项,是整个系统中受其他功能变化影响最多的功能。某类事故的发生并不是因为“吊运”功能出现了异常变化,而是“吊挂吊物”和“信号指挥”等其他功能异常变化,在“吊运”功能的运行过程中发生了作用。许多事故发生在“吊运(F14)”过程,其异常变化往往被视为事故的直接原因。事故调查报告的统计规律也表明“吊运”功能的异常变化在事故过程中是多发的。
根据对各种事故类型的功能变化耦合作用分析,可得到塔吊作业系统常见的4条功能变化耦合路径,如表4所示,这些功能变化耦合路径有时同时出现,且在不同的事故形式中分别表现出不同的重要程度。4条功能变化耦合路径分别与塔吊设备质量和三类塔吊特种作业人员的操作有关。

表4 4条常见功能变化耦合路径
2.3 定量分析
从风险角度理解功能变化耦合关系的相对重要性,包括变化程度和发生可能性两个维度。针对特定的上下游功能变化耦合关系,Patriarca等[16]提出了一套量化分析方案,用评分“1~4”表征功能在时机和精确度方面的不同变化程度,分值越大表示变化程度越大。此外,分配变化评分离散化的概率以说明功能变化的随机性;引入耦合系数描述上游功能输出对下游功能变化的放大或阻尼作用;引入场景系数描述不同场景条件对功能变化的影响。最后,通过蒙特卡洛分析识别容易出现大幅变化的上下游功能耦合关系。
为更贴切地描述功能变化,本文根据所描述的情景,使用1~4的评分方案对功能变化程度进行区分性衡量,延用耦合系数对功能变化程度进行修正,以相对概率分布区分不同潜在变化出现的相对可能性,无需场景系数,也不必进行蒙特卡洛分析来整合多个评价指标。对于一个具体上下游功能耦合关系,其量化分析过程如下:
(1)评价上游功能各潜在变化的变化程度Vi,其评分范围为1~4,Vi值越高表明变化程度越大,i为潜在变化的编号。
(2)延用耦合系数αi,表示上游功能各潜在变化对下游功能的耦合效应。
(3)用耦合系数修正上游功能变化的评分,修正后的功能变化评分CVi=Vi×αi,该评分能够区分上游功能的不同潜在变化在变化程度上相对大小。
(4)基于初步判断结果和专家评价结果,分别计算上游功能各潜在变化在发生可能性上的相对概率具体地:①按初步判断结果。参考 LEC法对事故发生可能性的量化方案(见表5),为功能变化发生可能性赋分,进而作归一化处理,得相对概率。表6以F1“安全教育培训与安全技术效底”为例,展示了按初步判断结果计算的过程。②按专家评价结果:以专家评价结果为各发生可能性的权重,结合赋分策略加权计算Qi,进而
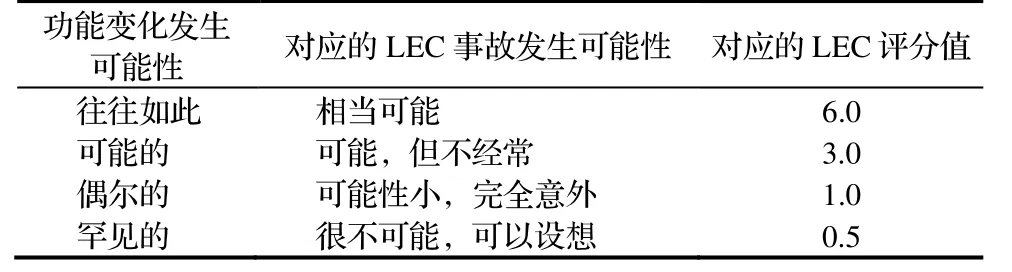
表5 参考LEC法的功能变化发生可能性量化
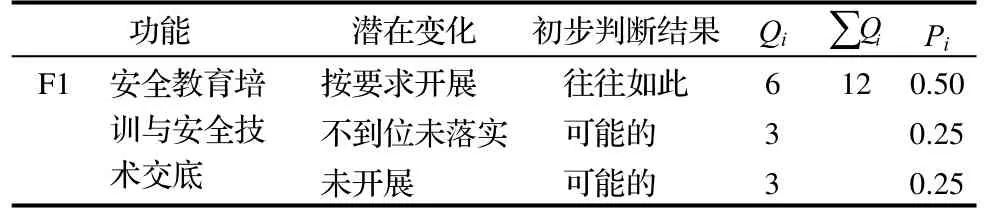
表6 以F1为例按初步判断结果计算Pi
(6)求各潜在变化综合评分之和,得该耦合关系的相对重要性评分
在描述事故案例时,一个功能可能同时发生于多种变化情景,但在量化分析时假设功能各潜在变化互斥(),也不会显著地影响分析结果。另外,上游功能的一个输出可能同时是下游功能的多个特征,例如F10输出的指挥信号,同时是F14的输入和控制特征,为简化过程,也不再特意区分上游功能输出作为下游功能不同特征的差异。
基于此,对功能变化耦合关系做量化分析结果如表7所示。其中,未分析其与F8、F11、F17等次要功能相关的耦合关系。

表7 功能变化耦合关系的量化分析结果
按功能变化发生可能性的初步判断结果和专家评价结果分别计算,所得到的评分在整体上具有一致性。相较而言,被调研者对F2、F3和F4等功能变化程度的评价更高,反映了对特种作业人员无证、持假证、状态不佳等情况发生可能性的更高估计。初步判断结果则对F1和F9的功能变化程度给出了相对高的评价,这种倾向是对事故调查报告统计规律的反映。综合二者,取均值作为功能变化耦合关系的量化评价结果,提取评分高于2.5的关键功能变化耦合关系,如图6所示。
2.4 分析结果对比
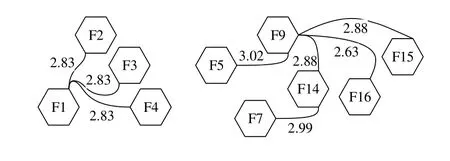
图6 高评分的功能变化耦合关系
(1)定性和定量分析的一致性。一是定性分析指出“吊运”是系统运行的核心功能,较多地受其他功能运行情况的影响,常常成为事故涌现的平台。定量分析也表明,“吊运”与 4项上游功能具有高于2的评分,易与其他功能发生较大的变化耦合;二是安全教育培训与安全技术交底是定性分析所得关键功能变化耦合路径的重要部分,也在定量分析中得到较高的评分,突出了与该功能有关的特种作业人员本质安全性的重要性;三是现场安全监管向大量功能提供控制特征,定性分析中该功能在各类事故中均常常表现为异常变化,定量分析则表明,该功能与下游功能耦合关系的相对重要性评分整体较高。
(2)定性和定量分析的区别。定性分析得到的与特种作业人员行为相关的关键功能变化耦合路径,例如“F2—F14”“F10—F14”“F12—F13—F14”等在定量分析中未得到高评分。定量分析更多说明了安全教育培训与安全技术交底、现场安全管理人员就位、现场安全监管等管理相关功能变化的重要性,这表明在塔吊作业系统中,管理活动相关功能相对于特种作业人员操作相关功能,具有更高的功能变化风险,但其功能变化却不一定引发事故涌现。但是,影响事故发生与否的关键功能变化,仍然是特种作业人员操作相关功能的变化。特种作业人员操作相关功能的异常变化与其前提和控制特征的失效有关,管理活动相关功能又负责提供这些前提和控制特征,因而在事故涌现过程中,管理活动相关功能也多处于异常变化状态。
3 结语
塔吊作业系统中存在许多影响系统运行安全的功能和功能变化耦合关系,必须对其实施监控措施以约束系统的异常表现,而在定性和定量分析提取的关键功能和关键功能变化耦合关系,则为实施塔吊作业安全管理措施提供了依据。定性分析得到了4条关键功能变化耦合路径,虽然还存在许多其他功能变化耦合路径,但这些次要的耦合路径,最终也是以影响关键耦合路径的方式参与事故涌现过程。解耦关键功能变化耦合路径,即可解耦事故。“吊运”是4条关键耦合路径共有的重要功能,并且定性和定量分析结果均表明,“吊运”功能是参与各类事故涌现的核心功能。因此,管控和抑制“吊运”功能的异常变化,是提升塔吊作业系统安全管理水平最直接有效的措施。
猜你喜欢
天津教育(2023年2期)2023-03-14 07:35:34
军事文摘(2022年19期)2022-10-18 09:54:54
四川水泥(2020年8期)2020-08-06 08:07:56
当代工人(2019年19期)2019-11-22 07:20:27
工程与建设(2019年4期)2019-10-10 01:45:56
山东冶金(2019年2期)2019-05-11 09:12:26
橡塑技术与装备(2018年21期)2018-11-13 01:36:00
声屏世界(2016年7期)2016-05-14 01:09:34
机电信息(2014年32期)2014-02-27 15:54:24
机电信息(2014年29期)2014-02-27 15:54:16