温室生长信息和环境信息多传感检测系统设计
2021-01-07 15:43张晓东李鹏飞毛罕平高洪燕
江苏农业科学 2021年24期
张晓东 李鹏飞 毛罕平 高洪燕










摘要:我国设施农业发展迅速,目前对作物长势信息检测主要依靠传统判别方法,但是传统长势信息判断存在主观性强、费时费力等弊端,因此设计了适用于温室高架栽培作物的轨道式移动检测平台,该平台通过搭载作物生长和环境信息多传感检测装置,可实现对高架植物的茎、果、叶长势和冠层-空气温差等生长信息,以及环境温湿度、光照强度等气象环境因子进行监测。为了适应温室行走环境,提高行走的稳定性,移动检测平台采用轨道式移动机构设计,即利用温室加热管道作为轨道,以确保机构的稳定行走,对平台的运动功能进行验证,绝对误差最大值为 7.2 mm,相对误差为0.72%。移动检测平台采用高举升升降机构,结合5自由度机械臂系统将传感器放到所需位置,将实际测量高度值与标准高度位置值进行数据对比分析,绝对误差最大值为0.83 mm,相对误差为0.78%,因此能精准地将所要使用到的传感设备放到所需的高度和预定位姿。
关键词:温室作物;多传感;信息采集;设施农业;生长与环境监测
中图分类号:S127 文献标志码: A
文章编号:1002-1302(2021)24-0209-06
收稿日期:2021-04-13
基金项目:国家自然科学基金面上项目(编号:61771224);江苏省高等学校自然科学研究重大项目(编号:18KJA416001);江苏省现代农业装备与技术协同创新中心 (编号:4091600029);江苏省自然科学基金(编号:BK20180864);现代农业装备与技术重点实验室开放基金(编号:JNZ201903);中国博士后科学基金(编号:2017M621650);“十三五”国家重点研发计划(编号:2018YFF0213601)。
作者简介:张晓东(1970—),男,江苏镇江人,博士,副研究员,主要从事基于可见光-近红外多维光信息的作物生长信息检测方法研究。E-mail:zxd700227@ujs.edu.cn。
我国设施农业发展迅速,提高温室作物的产量和品质是我国目前设施领域发展的关键问题。作物长势和环境信息的获取对温室环境调控具有重要意义。传统长势信息的获取主要依赖专家经验,主观性强;作物养分信息可以通过化学分析方法获取,但费时费力,且难以实现基于作物信息反馈的水肥和环境优化调控。因此,研发适用于温室环境的作物生长信息检测系统,具有重要的研究意义和应用价值。
国内外学者对于作物生长信息检测系统的研究领域较广。其中Elvanidi等利用高光谱机器视觉系统作为非接触技术来检测无土番茄作物中的氮素缺乏[1]。Ochoa等利用机器视觉和遥感卫星图像,对大田作物进行了实时的监测和生长状况的获取[2]。Bai等在温室环境信息的检测中针对无线传感网络的数据融合问题提出了分布式估计方案,提高了温室环境信息检测的准确性[3]。Ehret等通过神经网络对自动检测的温室番茄的产量、生长状况和用水进行分析,模型很好地预测了产量和生长需求,表明自动预测相关信息能够便于温室进行自动化管理[4]。Mangus等开发了高时空分辨率的作物水分胁迫监测系统,利用热红外成像技术并使用红外热像系统(thermal infrared imaging system,简称TIRIS)远程测量冠层温度得出作物缺水指数(crop water stress index,简称CWSI) 方法可以替代灌溉调度方法,为温室灌溉和管理提供了决策[5]。刘茂成用光电传感器设计了一个手持式的叶片氮素诊断系统,但其还未验证不同品种、不同生育期、不同氮处理的植物[6]。程坤设计的叶绿素含量检测系统在不损伤叶片的前提下实现叶绿素含量检测以及叶片所处环境温湿度的实时检测[7]。刘青结合无线传感器技术和声发射技术,实现了对温室土壤温湿度、空气温湿度、二氧化碳浓度、光照度及反映病害状况的声发射信号的采集,该系统提高了温室自动化和智能化水平并具有很好的移植性[8]。Liang等针对温室检测系统接线复杂且容易老化的问题提出了一种基于无线保真(WIFI)的温室环境动态检测系统,实现了远程检测,为温室中自动检测提供了宝贵经验[9]。
综上所述,现有的设施作物生长的非接触监测技术大多为分布式的系统,且多基于光电、视觉和红外等单一传感新型系统,难以全面监测作物营养长势和温湿度、光照等环境信息,且缺少先进适用的温室检测平台,难以适应温室非结构环境下的巡航检测。本研究的设计在现有移动平台的基础上,基于美国国家仪器有限公司(NI)的LabVIEW平台,结合多传感技术设计出一种用于作物生长信息和环境信息检测的检测系统,以期实现对作物生长和环境信息的获取和巡航监测。
1 硬件功能设计
如图1所示,本研究设计的检测系统主要由运动系统、多传感器检測系统、控制系统、动力系统和导航系统组成。其中,运动系统包括用于系统行走的轨道式的移动底盘和控制底盘运动的无刷减速电机;多传感检测系统包括获取作物形态特征的可见光相机,获取冠层温度的红外传感器,检测环境温湿度的环境光照和温湿度传感器,检测作物高度信息的激光测距传感器以及用于完成检测并搭载多传感器的机械臂和末端云台;控制系统包括工控机和运动控制器;动力系统包括48 V锂电池组和充电模组;导航系统通过磁导航地标传感探测,通过电磁导航的方式控制移动平台的顺序到达检测位。该检测系统集成了自动导引车(AGV)控制、机械臂操控、图像采集、环境信息采集、热成像系统、光谱信息采集等功能,能够满足温室环境中的作物营养、水分、长势信息和环境信息的移动式数据采集和信息贮存,同时结合上位机信息分析系统可实现温室作物生长和环境信息获取(图2、图3)。
该系统利用温室加热管作为轨道进行自主移动检测巡航作业,利用机械臂搭载的多传感检测系统获取作物的长势综合信息。通过获取作物冠层的热红外温度结合环境温度信息,获取作物的冠层-空气温特征,并进一步提取水分胁迫信息;基于可见光相机获取作物的多视场图像结合激光测距可得到作物的冠幅、株高、茎粗等形态特征[10-11]。结合环境温湿度、光照等传感探测可以实现对环境综合信息的获取,从而实现对作物生长和环境信息的综合评价。
2 移动平台结构设计
2.1 平台结构设计
系统搭载的多传感器为了适应不同株高和不同视场的信息采集,须要通过举升机构的升降和机械臂的水平移动改变多传感器的位姿,这会大幅改变移动平台的重心,故须避免作业平台倾覆的风险。为了保证巡航精度,确保驻点巡航探测信号的稳定性和定位精度,需要车体具有较好的适应性和稳定性,避免行走过程因轨道不平和重心大幅变化导致的平台整体颠簸,以满足作物生长和环境信息检测设备对平台巡航精度及平稳性的要求。因此,在设计移动平台结构时,为了降低重心,提高平台的稳定性,在零部件的布局上,将伺服电机、驱动器、蓄电池等较重的零部件布置在车体最下层,而将运动控制器、信号采集装置等轻型部件安装车体在上层;在材料的选取上,小车底盘采用了实心结构的钢材,而举升机构和机械臂则采用了高强度的铝材进行加工制造,以降低重心,提高系统高举作业的稳定性和载荷。同时为了保证续航要求,系统采用大容量锂电池,以保证长时间的自主巡航作业。
在设计小车底盘结构时,为了保持车身紧凑同时确保底盘的稳定性,车体长度设计为 1 100 mm,底盘宽度设计为750 mm。为保证巡航的精度和稳定性,采用轨道式的底盘结构,以温室加热管道作为轨道,底盘采用驱动轮、导向轮和支撑万向轮等3组轮系结构,其中导向轮的作用是支撑车体并保证车体沿轨道行进,导向轮表面采用菱形网格微结构,以保证具有一定的摩擦导向力,外缘采用凸起结构以便小车在产生极限偏离时能够适应轨道自动纠偏,确保不会脱轨。移动平台中部的驱动轮的作用是行进的驱动控制,采用橡胶轮式结构,为了提高车体的稳定性,过滤地面震动,导向轮和驱动轮上均安装有避震弹簧,以提高行走的稳定性。支撑万向轮的作用是在非轨道的温室铺装路面行走时,作为平台行走的辅助支撑(图4)。
2.2 机械臂系统的结构设计
为了适应不同株型,尤其是番茄、黄瓜等大株型和连续生长型作物的检测需求,机械臂系统采用了三级举升机构(图5),末端传感器的最高举升高度可达2.80 m。一级升降机构固定在底座框架上,二级升降机构与三级升降机构利用内置轨道与各升降机构内侧的凹槽镶嵌,并由同步带牵引,采用具有伺服反馈的电动推杆进行举升,完成三级机构的顺序举升,以实现对行程的精确控制。
为获取不同生长期、不同高度植株的主视和俯视方向的长势和营养信息,举升机构不仅要能够大幅升降,同时还须要配合多自由度的机械臂、末端云台机构,实现多传感器的高度、视场和位姿的调节。如图6所示,机械臂和云台机构采用两节机械臂,结合三级转轴构成水平回转臂,单节机械臂为500 mm,三节回转臂结合云台机构可以完成水平方向200~1 000 mm的不同伸展和回转半径范围的传感器的视场和位姿调节。末端云台机构用来固定多传感检测系统,结合翻转轴可以实现垂直方向 -90°~90°视角的传感器位姿调节。水平旋转轴采
用具有位置反馈伺服电机完成驱动控制,垂直翻转轴采用带有位置反馈的小型步进电机完成。系统探测时,基于期望的空间位姿坐标,通过多轴配合结合运动路径轨迹的组合规划,实现对多传感探测器的物距、视场等位姿的精准控制。
2.3 控制系统设计
2.3.1 控制系统设计
控制系统由动力系统、运动控制系统和信息采集系统组成。控制系统硬件以PC工控主机作为上位机及2套STM32F407嵌入式主板作为下位机系统,上下位机采用485总线通讯,实现检测平台的行走和机械臂的运动控制,以及多传感信息的采集。
轨道式多传感检测平台的动力系统采用 48 V/60 Ah 的锂电池为整个移动平台提供动力,1次充电可以满足整个移动平台的12 h续航能力。
运动控制系统采用STM32F407嵌入式主板实现平台的运动控制,移动平台使用2个步进电机分别驱动移动平台的左、右驱动轮。其中,每个电机的转向、转速、启动、停止由运动控制器控制。运动控制系统下位通过接收上位机发送的指令和控制输出,驱动电机驱动器控制移动平台中牵引电机的旋转。移动平台的转向则由差速实现。移动平台的前后导向轮是从动轮,起到导向和支撑小车沿轨道运动的作用。万向支撑轮在移动平台是平台的路面支撑,即作为铺装路面行走和进行整体搬运时的车体支撑[12-13]。
运动控制器作为移动平台和机械臂系统的运动的中枢,能根据遥控或者上位机的指令,完成平台的前进、后退、左转、右转等基本运动,以及机械臂系统的升降、旋转和位姿控制。本研究以平台移动控制为例说明控制流程。电机驱动的控制流程如圖7所示。
启动控制系统之后首先对整个系统进行自检与初始化,判断各电机与驱动器是否通讯正常、各传感器数据是否正常输出、工控机与运动控制器是否通讯正常。自检完成之后,通过上位机对传感器及控制器进行控制参数的初始化设置,包括对增量编码器原点设置,轨道式底盘各电机控制参数、初始运行速度等参数设置。当系统检测未发生任何异常报警并完成初始化,则进行复位并等待接收上位机的运动控制指令或遥控指令,当系统有任何警告或错误信号时,则移动平台停车报警,并等待人工处理。底层的运动控制器是基于用户定义事件的配置文件来安排顺序,协调并进行相对应的运动规划并决定合适的扭矩命令,然后将其发送至电机放大器,产生运动,所有控制代码均在ARM开发板上完成,并通过RS-485接口与上位机连接,在上位机的LabVIEW软件中通过VISA控件对串口波特率、奇偶校验、数据位、停止位等参数进行配置,数据通讯协议符合Modbus协议规范,从而在LabVIEW的前面板(图8)中完成交互操作。
2.3.2 多传感检测系统
多传感检测系统由工控机进行控制。工控机通过485总线采用Modbus协议解析获取温度、湿度、光照等传感器数据,采用千兆路由器网络端口获取视觉传感器、激光测距和光纤传感器的光谱信息。
多传感器的采集与处理系统利用LabVIEW界面编辑功能以及能够调用Windows32动态连接库的特性,并针对LabVIEW调用DLL的特点和传感器控制的复杂性,确定可见光相机、红外热成像、光谱仪和温湿压三合一传感器可调用的功能函数,每个可调用函数都对应着某一具体的功能任务,包括初始化函数、运行条件初始化函数、运行状态函数、脉冲发送函数、轴伸长计算函数、停止运行函数、归零函数、结束运行函数等。整个LabVIEW传感器部分的框图程序结构采用循环结构和顺序结构(sequence structure)堆叠而成,每一顺序框都对应某项固定的任务,都包含在整个固定频率的循环结构当中[14]。温度、湿度、光照信息读取程序框包括初始化事件和运行过程事件,如图9所示。
2.3.3 交互界面的设计
本研究设计的系统通过LabVIEW创建人机交互界面,实现温室作物和环境多传感信息的采集和运动控制过程的控制界面设计。如图8所示,生长信息和环境信息的交互界面布置在视图左侧,便于直观读取,运动控制的人机交互操作界面放在视图右侧,便于控制操作。信息采集界面包括图像信息的显示控件、波形显示控件。运动控制操作界面主要有移动平台、机械臂及云台的运动控制,同时包括执行脚本文件的输入模块,以便整个检测系统在固定工况下的自动运行。
3 平台试验
本研究对轨道式移动检测平台的运动功能进行了验证,试验地点在江苏大学现代农业装备与技术重点实验室Venlo型温室内。首先,对移动平台的运动精度进行验证,在轨道方向上间隔1 m等间距选择5个平移试验点,每个点进行5次测量再取平均值,并将其算作实际的测量位置值,将实际位置值与标准位置值进行数据对比分析。如表1所示,绝对误差的最大值为7.2 mm,相对误差最大值为0.72%。该数据表明,在存在自然误差的情况下,测量装置移动的精度较高,对实际测量的影响可以忽略。
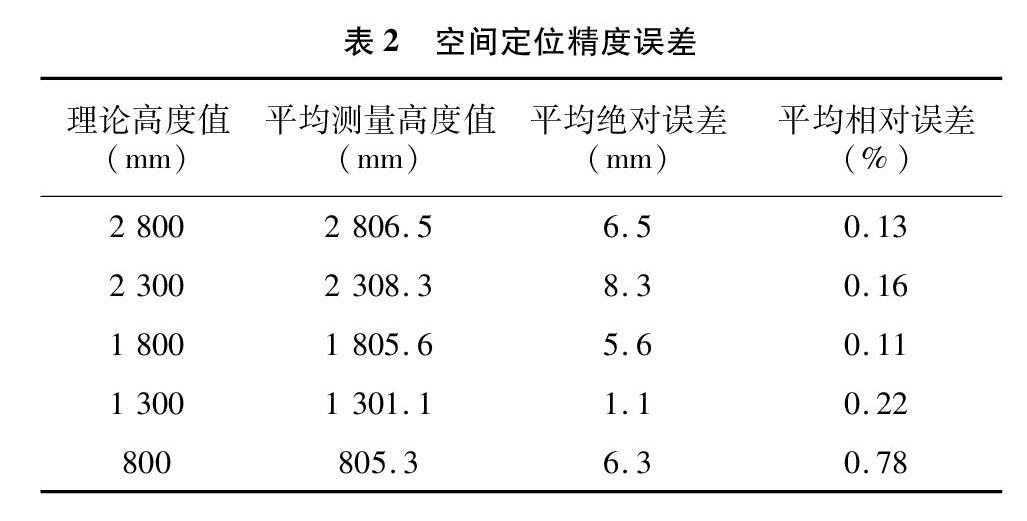
取5个升降机构的试验点,起始点为800 mm,之后取等间距500 mm为测试点,同理每个点进行5次测量并平均,将测量出来的实际测量高度位置值与标准的高度位置值进行数据对比分析,得到相关数据如表2所示。实际测量的高度位置与标准高度位置的绝对误差最大值为8.3 mm,相对误差最大值为0.78%。考虑到摩擦和自然误差等,可以认为在高度方面的误差带来的影响可以忽略。
4 结论
本研究设计了一种适用于温室基于轨道式平台的温室综合信息移动检测平台,为了提高系统行走的稳定性,采用温室的加热管道作为行走轨道,采用低重心设计开发了车体结构。为了实现对不同生长期作物的监测,采用了三级举升机构结合机械臂系统,完成不同作物和生长期的作物信息的获取。该平台可搭载作物生长和环境信息多传感检测装置,实现对高架植物的茎、果、叶长势和冠-气温差等生长信息,以及环境温湿度、光照强度等气象环境因子的监测。平台移动绝对误差的最大值为7.2 mm,相对误差最大值为0.72%;平台升降的绝对误差最大值为8.3 mm,相对误差最大值为0.78%,具有较高的运动控制精度。
参考文献:
[1]Elvanidi A,Katsoulas N,Ferentinos K P,et al. Hyperspectral machine vision as a tool for water stress severity assessment in soilless tomato crop[J]. Biosystems Engineering,2018,165:25-35.
[2]Ochoa K S,Guo Z F. A framework for the management of agricultural resources with automated aerial imagery detection[J]. Computers and Electronics in Agriculture,2019,162:53-69.
[3]Bai X Z,Wang Z D,Zou L,et al. Collaborative fusion estimation over wireless sensor networks for monitoring CO2,concentration in a greenhouse[J]. Information Fusion,2018,42:119-126.
[4]Ehret D L,Hill B D,Helmer T,et al. Neural network modeling of greenhouse tomato yield,growth and water use from automated crop monitoringdata[J].ComputersandElectronicsinAgriculture,2011,79(1):82-89.
[5]Mangus D L,Sharda A,Zhang N Q. Development and evaluation of thermal infrared imaging system for high spatial and temporal resolution crop water stress monitoring of corn within a greenhouse[J]. Computers and Electronics in Agriculture,2016,121:149-159.
[6]刘茂成. 植物叶片氮营养手持诊断仪的设计与研发[D]. 长春:吉林农业大学,2017:35-36.
[7]程 坤.基于STM32的叶绿素含量光电检测仪设计[J]. 电子技术与软件工程,2014(20):143-145.
[8]刘 青. 基于WSN的温室无线监测系统研究[D]. 天津:天津科技大学,2018:42-44.
[9]Liang M H,He Y F,Chen L J,et al. Greenhouse Environment dynamic Monitoring system based on WIFI[J]. IFAC-Papers OnLine,2018,51(17):736-740.
[10]Croft H,Chen J M,Zhang Y. The applicability of empirical vegetation indices for determining leaf chlorophyll content over different leaf and canopy structures[J]. Ecological Complexity,2014,17:119-130.
[11]阙玲丽. 基于计算机视觉技术的玉米植株高度检测的研究[J]. 农机化研究,2017,39(12):219-223.
[12]杭 腾,毛罕平,张晓东,等. 基于机器视觉的番茄长势信息无损检测的研究[J]. 农机化研究,2015,37(11):192-197.
[13]张铁民,黄 翰,黄鹏焕. 电动轮式移动小车控制系统设计与試验[J]. 农业工程学报,2014,30(19):11-18.
[14]孙意凡,孙建桐,赵 然,等. 果实采摘机器人设计与导航系统性能分析[J]. 农业机械学报,2019,50(增刊1):8-14.
[15]王 康,梁秀英,周风燃,等. 基于磁导引的履带式小车作物图像自动采集系统设计与试验[J]. 华中农业大学学报,2020,39(2):141-149.
猜你喜欢
科学家(2016年3期)2016-12-30
现代商贸工业(2016年28期)2016-12-27
现代农业科技(2016年20期)2016-12-20
农家科技下旬刊(2016年9期)2016-12-15
中国经贸(2016年19期)2016-12-12