倾斜摄影测量与建筑施工进度监测研究
2021-01-07 03:40:32孙伟伦耿源浩
北京建筑大学学报 2020年4期
孙伟伦, 朱 凌, 耿源浩
(北京建筑大学 测绘与城市空间信息学院, 北京 100044)
建筑施工进度监测是指在施工过程中,通过对项目的实时监控,采集项目实际施工进程的数据信息,以便对项目进度状况进行分析,了解项目的进度动态,确保每项工作都能根据计划有序进行,此为一个动态连续的监测过程。
目前,对建筑物施工进度监测的方式主要分为以下几类:一是传统的单纯依靠人力监控,通过现场巡视并与计划表进行对比,依靠人工采集局限性大且耗财耗时耗力,往往具有非常严重的滞后性和主观性,当出现较大误差时,所需补救措施代价非常大;二是使用无线射频识别(Radio Frequency Identification,RFID)技术采集项目施工的进度信息[1],该方法要求目标建筑本身附着有RFID标签,需要在建筑施工环境中进行硬件布设,成本和复杂性高;三是使用3D激光扫描技术动态采集施工进度数据,BOSCHE提出改进的迭代最近点(Iterative Closest Point,ICP)算法,通过3D激光点云与3D CAD建筑模型特征点匹配,识别出发生变化的区域,用于施工进度跟踪[2],该方法证明了利用激光点云数据进行建筑施工进度监测的可行性,但是激光点云缺乏纹理信息,且数据密度分布不均匀,在三维空间中呈不规则、不连续分布;四是利用全站仪[3]、测距仪[4]等监测传感器跟踪测量,对比施工图纸或往期数据获得施工进度信息,但工作量大,时间成本高,且获得信息形式单一;五是结合三维点云与BIM模型,如刘莎莎等[5]提出一种建筑施工进度监测方法,可实现建筑施工进度半自动核查,但BIM 模型是静态的,施工现场信息变化快,往往容易导致模型与现场实际情况脱节。
摄影测量技术在施工监测中的应用主要有以下几类:一是获取施工现场影像和视频数据,如SAAD和HANCHER设计了一个多媒体系统Project Navigator,利用动态捕捉影像的方式跟踪项目进度,该方法只是通过影像获取进度数据,无法从三维变化角度判断工程施工情况[6];二是利用面模型反映建筑物高度的特点,通过数字高程模型(Digital Elevation Model,DEM)或数字表面模型(Digital Surface Model,DSM)检测出目标建筑的高程变化,在此基础上再利用空间数据库中的数字正射影像图(Digital Orthophoto Map,DOM)或数字线划地图(Digital Line Graphic,DLG)检测出目标建筑的二维变化,从而得到研究区域的三维变化信息[7-8];三是结合雷达点云数据和航空影像,可同时提取建筑物高程变化信息和面积变化信息[9]。但基于面模型的施工场景的三维建模与变化监测,难以准确描述任意位置、任意时刻的建模对象属性,难以体现建模对象的多维性[10]。
体素是体积元素的简称,广泛应用于三维成像、医学影像与3D打印等领域[11-13]。体素是组成三维空间的最小单元,一个体素表示三维空间中规则格网的值,相当于二维空间中像素的概念。 体素模型相对于面模型有其独特的优势,能够更详细地描述施工现场的各要素信息,结构简单,格式统一,不受物体复杂性影响,可以直接立体显示。
航空影像数据空间分辨率高,数据分布连续,且数据采集局限性较小。与三维激光扫描获取点云数据相比较,利用影像生成点云能够弥补密度不均、分布不连续的劣势。传统的正射影像只能从垂直的角度对目标地物进行拍摄,建立的三维模型无法直观地体现目标地物侧面的真实纹理,而倾斜摄影技术突破了这一缺陷,通过把正射影像和倾斜影像相结合,实现对目标地物表面的三维建模。
综上,针对现有施工监测方法存在的不足,本文提出基于体素模型的建筑施工监测。利用无人机拍摄倾斜影像,并生成点云,然后采用点云体素转换算法对点云进行体素化,并比较两期体素模型,获得建筑的几何变化部分,以实现施工进度的快速、准确监测。试验流程如图1所示。
1 试验数据获取
本文数据采用北京市大兴区某工地的无人机倾斜影像,以一栋在建的五边形单体建筑物的两期无人机倾斜摄影影像为例,分别于2018-12-19和2019-04-19拍摄,拍摄时间间隔为4个月。本试验采用的无人机型号为大疆精灵4消费级无人机。第一期搭载五镜头相机,型号为Nokia公司的808 PureView照相机,采用PureView成像技术和像素超采样技术,像素传感器高达4 100万,分辨率为300 dpi。第二期搭载双镜头相机,型号为SONY公司生产的ILCE- 5100双镜头套装微单数码相机,有效像素2 430万,分辨率为350 dpi。目标建筑物施工过程中的两期照片如图2、图3所示。图2显示,建筑物左边梯形部分已经封顶,显示白色水泥顶,右侧四边形部分为在建状态,裸露出钢筋混凝土,下侧广场无建筑物,堆放有少量施工材料。图3显示,建筑物右侧四边形部分已经封顶,下侧新增2条走廊,白色水泥顶基本建成,有蓝色安全维护网的为在建走廊。数据详细信息见表1。
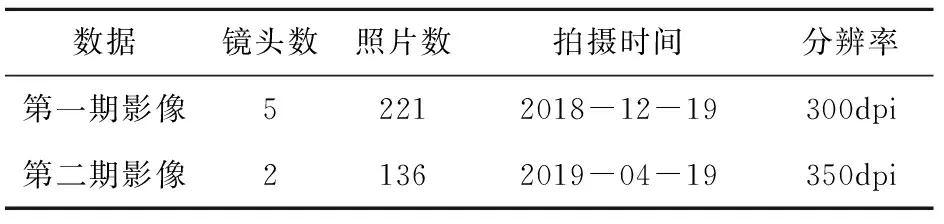
表1 试验数据信息
2 算法原理
2.1 点云与体素的分辨率选择
在现场的数据采集时,一味追求过高的点云分辨率也是不可取的,只会增加数据采集的时间与难度,加大内业处理的工作量,也展现不出激光扫描技术在数据获取方面的速度优势。刘求龙等[14]提出合适的点云分辨率计算式为:
(1)
式中:Q为点云质量,m为扫描物体表面的点云分辨率,λ为物体表面的最小特征尺寸。如果点云分辨率设为20 cm,扫描特征尺寸为10 cm的物体时,Q=1-(20/10)=-1,则被认为是不合适的,可以理解成点云分辨率大于物体表面最小特征尺寸,不能较高程度地还原被扫描物体;当点云分辨率设为5 cm时,Q=1-(5/10)=0.5,则表示物体表面细节能被识别的信任度达到50%。
体素分辨率是小正方体的边长,需要参考点云分辨率,从而确定体素分辨率。体素分辨率越大,数据量越小,运算速度越快,表示的模型细节程度越低;体素分辨率越小,数据量越大,运算速度越慢,表示的模型细节越丰富。但若体素分辨率小于点云分辨率,生成的模型将会存在许多空隙,达不到三维建模的要求。考虑目标建筑物三维模型的数据量,同时又保证更精确完整还原建筑物等因素后,体素分辨率的选择应略高于且相近于点云分辨率。
2.2 点云的体素化
三维空间中,每个点云点都存在体素与其对应,针对txt格式的点云数据,实现体素化主要分以下3步:
1)确定点云的分布范围。 通过比较分别确定点云数据在X、Y、Z3个坐标方向上的最小值和最大值xmin、ymin、zmin、xmax、ymax、zmax。
2)根据点云分辨率,选择合适的体素分辨率res,体素分辨率决定了体素模型与初始点云的接近程度,体素分辨率越小,体素化后两者越相似。
3)确定点与体素的对应关系。首先定义1个三维零矩阵,然后对点云数据中每个点的三维坐标(x,y,z),均按式(2)计算它的体素坐标,并对体素进行标记,即把三维矩阵中相应位置的元素改为1,遍历所有点之后,再对三维矩阵进行体素显示,即完成点云的体素化。
(2)
式中:INT表示向下取整,(i,j,k)表示体素的三维坐标,res表示体素分辨率,根据上述步骤可以实现空间点的快速体素化[15]。
2.3 两期体素模型的比较
两期体素模型的比较,实质是2个不同维度的三维矩阵相减,从而得到发生变化的体素部分。步骤及原理如下:
1)首先确定2个三维矩阵的最大行、列、页数,即最大l、m、n值。
2)扩展为相同维度的三维矩阵。由于不同维度的矩阵无法相减,所以要实现对应位置元素相减,需要将2个维度不同的三维矩阵扩展为维度相同的三维矩阵。首先以最大l、m、n值为三维矩阵的行、列、页数,定义2个三维零矩阵A和B,然后把两期三维矩阵的元素分别赋值到矩阵A、B的相应位置上,即完成不同维度矩阵的扩展。
3)三维矩阵相减。第一期体素模型的三维矩阵A,矩阵元素只定义数字0和1,0表示不存在体素,1表示存在体素;第二期体素模型的三维矩阵B,矩阵元素只定义数字0和2,0表示不存在体素,2表示存在体素。用扩展后的第二期三维矩阵减去第一期三维矩阵,有4种结果,分别是2、1、0、-1。如果等于2,表示为第二期相对于第一期增加的变化部分;如果等于1,表示为两期没有发生变化的部分;如果等于0,则没有意义;如果等于-1,表示为第二期相对于第一期减少的变化部分。
3 试验结果分析
3.1 试验结果
首先采用Photoscan Pro V1.4.5软件对两期倾斜影像进行处理,生成点云模型,由于目标建筑物的最小特征尺寸为不大于0.3 m,所以对点云模型的分辨率设置为0.3 m。生成的两期点云模型如图4、图5所示。
然后采用Cloud Compare 2.9对两期点云模型进行裁剪、去噪、配准等处理。本算法针对的是建筑物的几何变化,所以要删除点云模型的颜色信息,并保存为txt格式。为展现较好的视觉效果,把一期点云模型设为橘色、二期点云模型设为白色,如图6所示。
最后分别对处理好的两期点云进行体素化。因点云分辨率为0.3 m,为使体素模型更完整地还原目标建筑物,体素尺寸略小于建筑物的最小特征尺寸,即体素分辨率应高于点云分辨率,所以选取0.2 m为体素分辨率。生成两期体素模型如图7、图8所示。
对两期体素模型做比较,得到目标建筑物的体素模型的第二期相比于第一期的增加、减少、无变化部分,分别如图9~图11所示。
3.2 结果分析
根据体素差异模型可以得出,由2018-12-19至2019-04-19,4个月的施工期间,目标建筑物的施工进展主要如图9所示,进展包括建筑物顶部的加盖,建筑物右侧框体的加固,以及建筑物左侧面的已建成走廊和在建走廊。根据图10可以得出,差异模型的减少部分大多为位于图9体素的下方体素,即第一期模型的外部表面体素,此变化对于施工进度监测没有意义,而少数为施工现场某些相关地物的移动所引起的体素变化。图11为4个月时间段内,一直没有产生变化的部分。
传统面模型如DEM、DSM为二维模型,只能够表达表面变化信息,难以体现建模对象的多维性,相比于DSM,本文采用体素模型能够更好表现出建筑物的真实三维变化信息,反映模型的内部及侧面情况,且结构简单,格式统一,不受物体复杂性影响,支持直接立体显示。
由于处理过程中的精度损失和误差累积等问题,差异部分存在少量伪变化,如图9走廊上方的少量体素。
结果表明,在4个月时间内,此建筑完成了如上的建设施工作业。
4 结论
本文基于体素模型的建筑施工进度监测方法,初步探讨了点云模型的体素化和两期体素模型对比的整体流程和思路。对北京市大兴区某工地在建建筑的两期无人机倾斜摄影影像进行点云模型构建,模型空间位置配准,以及体素模型对比处理。试验表明,体素模型可以较好地还原建筑物的三维模型,并可以得到施工过程中建筑物增加的变化、减少的变化、以及未变化的部分,结果一目了然,人工干预少,效率高,以此来对建筑物进行施工进度监测是可行的。
本试验采用点云体素转换算法生成三维体素模型,此算法高度依赖于点云分辨率,若点云数据的分辨率低,模型不能展现建筑物的更多细节,生成的模型为非实心模型,导致差异模型的减少部分存在无意义变化。本文所得到的变化结果是建筑物的几何变化部分,没有涉及建筑物的表面颜色,后期研究重点是监测建筑物表面的颜色变化、降低数据处理环节的精度损失等问题。
猜你喜欢
计算机集成制造系统(2022年11期)2022-12-05 11:40:44
科学家(2022年3期)2022-04-11 21:36:53
建材发展导向(2021年10期)2021-07-16 07:14:48
计算机集成制造系统(2020年4期)2020-05-08 02:41:16
数学物理学报(2019年3期)2019-07-23 01:15:40
中国惯性技术学报(2019年1期)2019-05-21 00:58:46
经济技术协作信息(2018年22期)2019-01-19 03:00:02
家庭影院技术(2018年9期)2018-11-02 05:31:32
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32