基于云体催化适宜度的火箭作业决策矩阵
2021-01-06 03:32:58高建秋陈荣陈炳洪肖伟生陆立凡苏俞先钟晨
广东气象 2020年6期
高建秋,陈荣,陈炳洪,肖伟生,陆立凡,苏俞先,钟晨
(1.广东省突发事件预警信息发布中心,广东广州 510641;2.广州市气象台,广东广州 511430)
开发利用空中云水资源,增加自然降水,是目前减缓旱情的一种有效手段。国内外实践证明,在适宜的条件下,在云体的适当部位进行有科学指导的人工催化作业,是能够增加降雨或减少冰雹灾害的[1]。把握准确的作业时间、准确的作业部位、准确的作业剂量对火箭人工播云作业取得良好效果具有决定性作用,只有准确掌握了云系发展和演变的实况特征与规律,才能科学的做出作业决策。目前,广东全省组网的多普勒天气雷达的探测产品[2]是气象常规业务中对云系实况最精细的反映,回波强弱能够判断作业云体发展情况;回波的网格数量能够判断作业云体面积;回波顶高能够反映作业云体发展高度;雷达回波追踪算法能够追踪云体移动的速度和方向[3]。国内很多学者一直致力于雷达资料在人工影响天气作业指挥中的应用研究,游积平等[4]基于XML技术构建的广东省人工增雨指挥系统在2013年已开始将平面雷达资料用于作业指挥;孙琪[5]针对雷达拼图数据延时的问题改为利用TITAN外推路径进行作业预警,减少了预警的漏报;吴汪毅等[6]建立了2~8 km高度强度场雷达拼图,并根据火箭弹道轨迹方程,计算火箭人工增雨作业的仰角、方位角和用弹量;刘志等[7]将图像处理技术应用于增雨作业目标云的自动识别中,设计并实现了人工增雨指令实时计算软件;陈林等[8]在本站X波段数字化天气雷达原有程序里增加距离、仰角、方位角、用弹量测算等作业参数,并实现高炮、火箭与雷达计算作业参数同步;杨立洪等[9]利用雷达资料量化了人工增雨作业参数。在以往的研究中采取的方式多是将目标云作为一个整体的作业对象,没有再进行更精细的区分。基于当前计算机强大的计算能力,本研究首先利用一系列指标要素来选取适合的作业云体,再对目标云体进行精细的分析,建立了定量云体催化适宜度的计算方法。
1 基础数据应用
1.1 雷达数据应用
获取广东省多普勒天气雷达资料,解出各条径向上的探测数据,经过七点中值法质量控制后,利用CAPPI等高面插值算法,将全省雷达进行组网,插值出0.5~10 km高度的基本反射率、组合反射率、云顶高度和垂直液态含水量等扩展精细化格点产品。产品分辨率为0.01×0.01经纬度,网格范围为108.5°E-119°E,18.2°N-27°N。生成的各种雷达产品统一采用高度、时效、经度和纬度的NetCDF四维空间结构文件保存,以{产品名}/{日期}/{时间}.nc进行命名。
1.2 火箭作业点及相关探空站、自动站数据应用
采用XML文件在WebGIS系统上配置火箭作业点基本信息,包括作业点编码、名称、经纬度、海拔高度、安全设界范围以及10 km范围内对应的多普勒雷达产品格点行列号。为了确定火箭有效催化高度需要知道作业当天的关键温度层的高度,为每个火箭作业点配置距离最近的探空站编码(只有1个)。为确定作业时的风向和风速情况,为每个火箭作业点设置关联的区域自动站编码(可以有多个)。
1.3 火箭运行轨迹参数应用
广东省人工影响天气业务使用的火箭发射装置是WR-98型火箭,表1给出了WR-98型火箭发射装置安全发射仰角的弹道曲线关键参数,火箭运行轨迹随仰角不同,火箭携带催化剂起始播撒点位置、高度,弹道最高点位置、高度,终止播撒点位置、高度以及理论落点位置都会随之发生改变[10]。
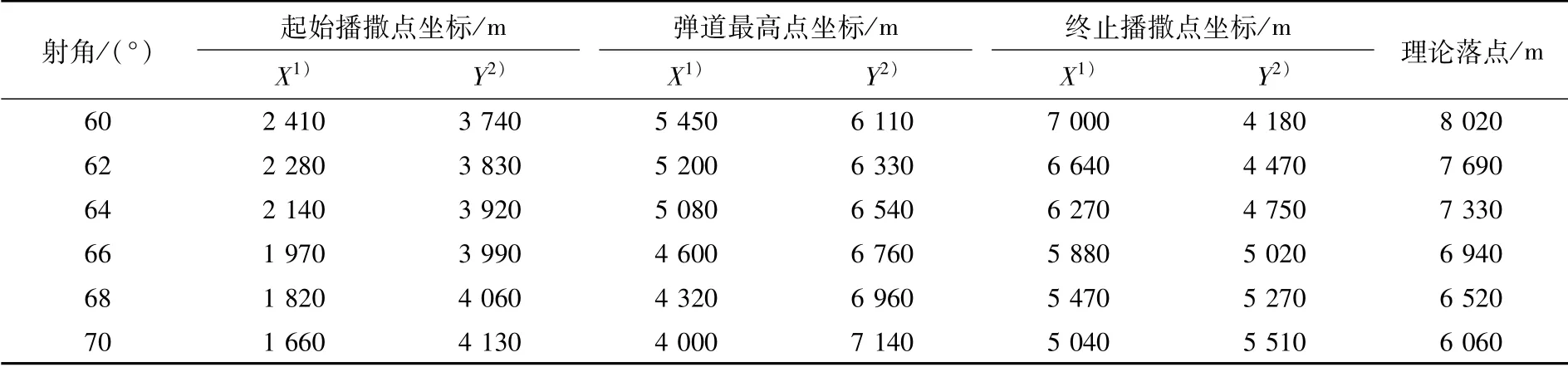
表1 WR-98型火箭弹道曲线参数
1.4 风对火箭运行的影响参数应用
计算作业方案必须考虑风的影响。由于火箭主动段时间是0~2.5 s,这期间速度可以加速到约800 m/s,因此播撒路线受高层的风速影响很小,主要是受初始阶段的地面风速影响[10]。2.5 s之后靠火箭的惯性继续上升,播撒是在第7秒开始,播撒时间是7~40 s。由于WR-98型火箭尾翼的作用使得火箭顺风发射会引起火箭抬头,因此仰角应该往小调整相应角度。火箭逆风发射会引起火箭低头,因此仰角应该往大调整相应角度。横测风的修正要向风前进方向增加修正角度。火箭逆风发射会引起火箭低头,因此仰角应该往大调整相应角度。横测风的修正要向风前进方向增加修正角度。具体修正的角度参考厂家给出的理论计算参数。
2 定量云体催化适宜度计算原理与方法
人工影响天气作业实施的对象是云体,火箭播撒的催化剂具有严格的有效使用标准,因此必须判断有效催化空间。有效催化空间的判定不但与火箭的轨迹有关,还与高空温度分布有关,用距离火箭作业点最近的探空站当日最新一次探空资料在垂直层上差值来判定-5和-20℃层的高度。根据WR-98型火箭弹道表所给的几个重要参数可以描述不同仰角下发射的火箭在空中运行的基本轨迹特征,表1中起始播撒点位置、弹道最高点位置、终止播撒点位置都是相对于发射平面的距离,计算海拔高度要加上作业点的基础海拔高度。有效催化云体是由方位角、-5℃层高度、-20℃层高度、起始播撒点位置,弹道最高点海拔高度、终止播撒点位置等值界定的环形体空间内的云块。垂直方向上有效催化环形体范围的下限截面高度是-5℃层高度与起始播撒点高度两者之中的高值;上限截面高度是-20℃层高度和弹道最高点两者之中的低值;环形体的半径是终止播撒点位置和起始播撒点位置的差、环形体的角度是22.5°。图1是火箭发射仰角为60°时的有效催化云体示意图。

图1 火箭发射仰角为60°时的有效催化云体示意图
有效催化云体内雷达反射率因子的强弱能够表征构成云体的降水粒子分布的情况,雷达网格产品水平分辨率为0.01×0.01经纬度,垂直分辨率0.5~6 km每隔0.5 km一个高度层,6~14 km每隔1 km一个高度层。在有效催化范围内,各垂直层分布的云体网格雷达反射率因子z值之和设为a,,a是评价有效催化云体基础条件的表征值,是判断作业决策“优劣”的最重要因素。
火箭轨迹与云体移动方向的夹角决定了火箭的播撒轨迹产生的催化剂线源是否能得到最有效的扩散。云体移动方向由雷达回波追踪算法得到,火箭轨迹的方位在忽略风向影响的前提下与方位角重合。方位角与云体移动方向的夹角设为b,b越趋近直角,催化影响的有效范围越大,因此这个夹角是判断作业决策“优劣”的另一个重要因素。
a、b都对催化效果有影响,但是影响的权重比例不同,设要素a的影响权重占70%,要素b的影响权重占30%,要素a与要素b共同作用形成决定云体催化适宜度的量化值S,S=a×0.7+a×|sin b|×0.3,对各作业方案的S值进行排序,排序前20% 为“优”,排序20% ~40%为“良”,其余为“差”。
3 算法运行逻辑
3.1 选定满足作业条件的云体
算法每隔6 min根据实时雷达资料对全省所有作业点进行作业条件的判断,满足条件的就进行决策矩阵的计算。图2是算法运行的逻辑示意图。
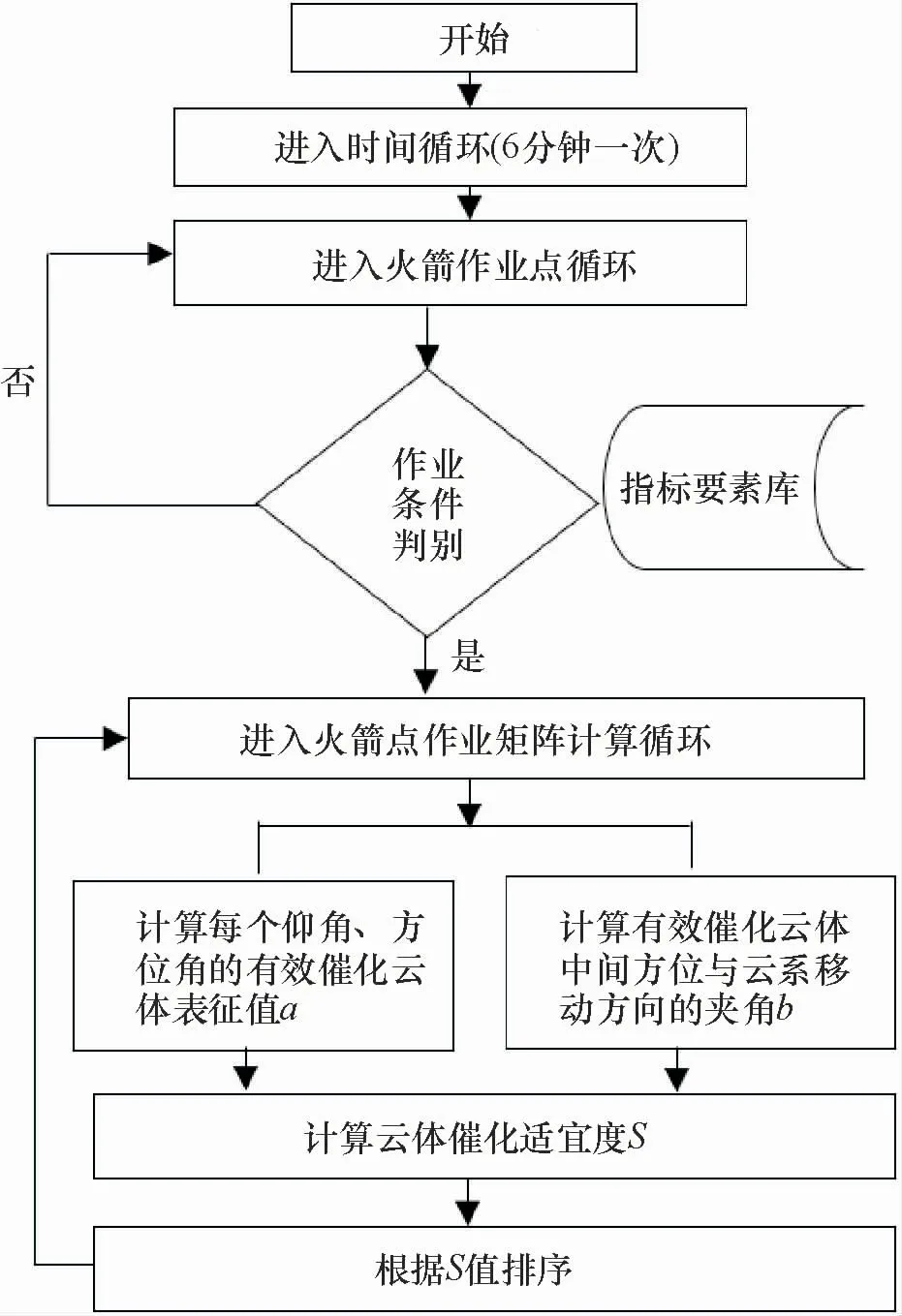
图2 算法运行逻辑示意图
火箭作业点周围10 km范围内必须同时满足指标要素库中的所有条件才适合开展利用碘化银作为催化剂的火箭人工增雨作业,因此,要对指标要素库中的所有条件依次进行判断,任一个条件不满足,算法都会终止。本研究目前建立的火箭人工增雨作业实施条件指标要素库包含6个条件,具体如下,指标要素库可根据不同的作业目的进行相应的调整。
(1)未来24 h降水量介于5~50 mm;
(2)10 dBz<回波强度<40 dBz(用1、3、5 km雷达回波判断,各层都要满足);
(3)满足条件的回波面积>20 km2(用5 km雷达回波判断。目前多普勒雷达的网格分辨率约为1 km×1 km,计算面积时,可直接按照每格点1 km2来代替);
(4)回波顶高>6 km(随季节调整)的面积和>10 km2的面积;
(5)负温层厚度>1 km;
(温层厚度=中心回波顶高-当天的零度层高度;零度层高度=当天临近探空站临近时次的探测值,中心回波顶高即10 km范围内回波顶高最大值)
(6)地面风速<15 m/s。
3.2 生成基于云体催化适宜度的人影火箭作业决策矩阵
广东省安全作业规范规定火箭作业发射仰角范围为60°~70°,每个作业点的安全射界范围不一样,采用索引号来编码,可根据索引号从XML文件中得到对应描述。依次精细到22.5°一个分区的不同仰角和方位角计算云体催化适宜度S,系统会输出一个由仰角和方位角组成的决策矩阵,如图3所示,即按照安全作业仰角60°~70°范围,每隔2°进行1轮、共进行6轮安全射界范围内的云团立体扫描,依据算法计算每一个小云块的催化适宜度,从而识别出降水云体最有效的催化部位。
火箭作业决策矩阵每一个扇形格子,都对应一个火箭作业方案,按照云体催化适宜度的排序,系统标注作业方案的属性,绿色表示“优”,黄色表示“良”,红色表示“差”,黑色表示“禁止”。根据WR-98火箭导弹表、探空数据、雷达网格数据生成火箭运行模拟轨迹示意图和作业方案参数如图4所示。
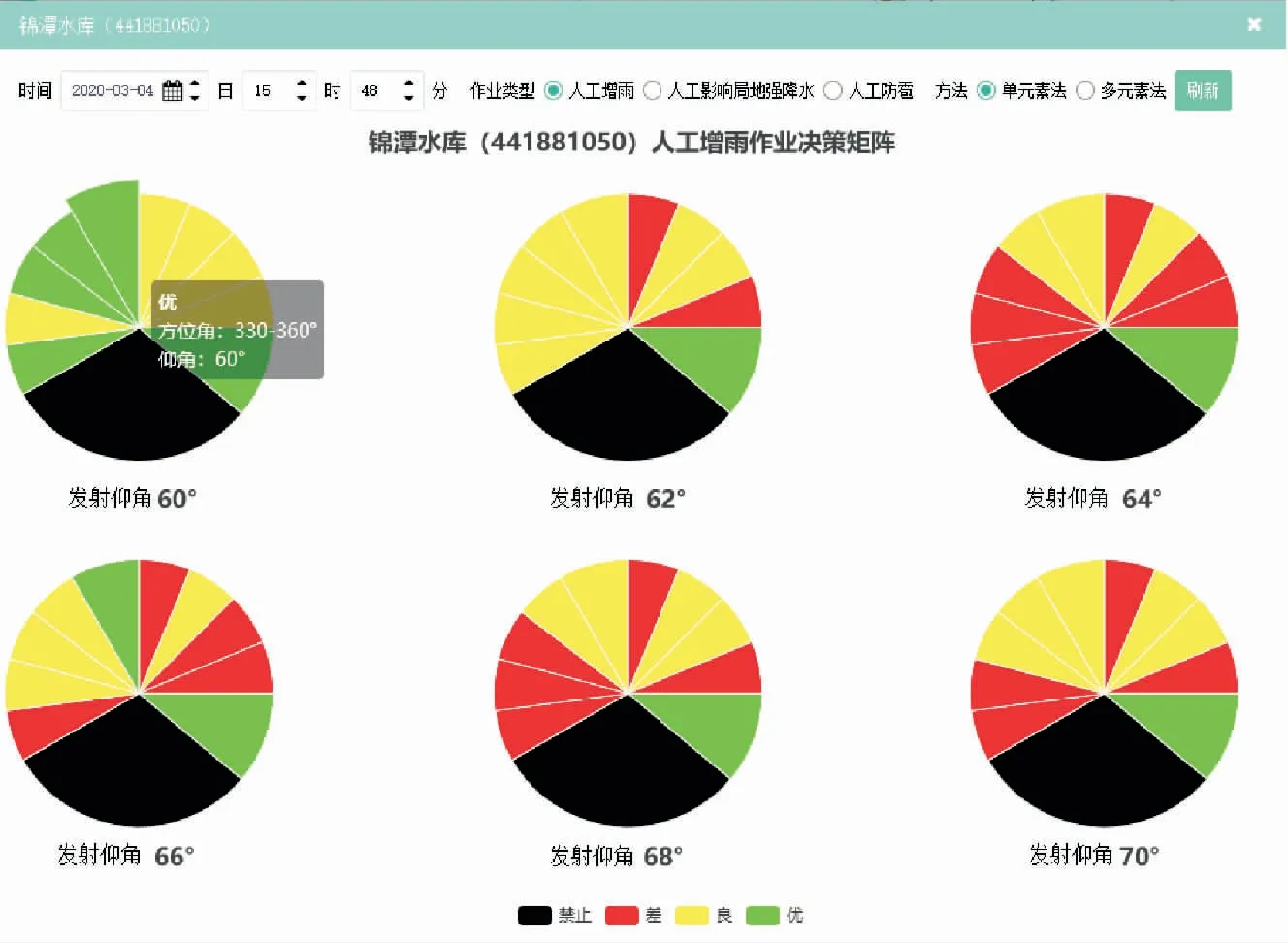
图3 人影火箭作业决策矩阵

图4 火箭运行模拟轨迹示意图及作业方案参数
作业方案中关于发射仰角和发射方位角的修正值根据作业点临近自动站的风速监测值和火箭产品风速影响修正表查得,由于地面风切变较大,无法准确判断作业点的实际风向,因此交给现场作业指挥员来判断更为准确,系统只输出修正角度,不输出修正方向。目前气象业务中仍缺乏对云中冰核浓度、过冷水含量等的实时观测手段,因此参考用弹量仍是经验值,尚无法做到定量化计算。
4 结论
1)地面人影作业技术是指在对作业目标云体充分认识的基础上借助火箭载体将催化剂送入云中适宜位置影响云体降水的过程,是气象技术与火箭、催化剂等工程技术的集合应用。雷达是目前能够对云体特征实现连续监测的最有效观测手段。由雷达产品衍生出的系列短临预报产品为业务部门加强对作业云体的认识和监测提供了技术支撑。
2)利用广东省高时空分辨率的立体网格多普勒雷达拼图产品、雨量智能网格预报产品、实时探空资料、自动站实时监测资料联合建立了广东人工增雨作业实施指标要素库,包含6个指标。利用这些指标对作业点周边10 km云系进行条件判断,发现满足条件的云体,即进入分析计算云体立体探测数据阶段。
3)依据定量云体催化适宜度算法识别出降水云体最有效催化部位,对应得到针对最有效催化部位的火箭发射仰角和方位角。地面风速会影响火箭的轨迹,应当对风速的影响加以修正,根据作业点周边实时地面监测站的风速值,算法智能输出火箭发射的修正偏角。
4)基于定量云体催化适宜度建立的火箭作业决策矩阵对提高人影作业条件识别率,提升作业实施精准率可以起到技术支撑作用。
猜你喜欢
中国铁道科学(2022年3期)2022-06-09 03:53:50
海峡科学(2021年9期)2021-11-13 01:27:56
中国电气工程学报(2020年19期)2020-12-28 15:39:33
初中生世界·九年级(2020年2期)2020-04-10 06:47:22
农家科技下旬刊(2019年8期)2019-10-08 05:50:07
学生天地(2017年12期)2017-05-17 05:51:23
科技视界(2016年15期)2016-06-30 12:48:10
中国火炬(2015年7期)2015-07-31 17:39:58
中国火炬(2014年5期)2014-07-24 14:15:58
意林·少年版(2011年4期)2011-07-06 05:07:01