
适应个体差异的下肢康复机器人步态规划与实现
2021-01-04 07:16:56蒲明辉余蔚夏凯陈琳潘海鸿
中国康复理论与实践 2020年12期
蒲明辉,余蔚,夏凯,陈琳,潘海鸿
1.广西大学机械工程学院,广西南宁市 530004;2.广西制造系统与先进制造技术重点实验室,广西南宁市 530004
下肢康复机器人是针对具有下肢运动功能障碍患者设计的机器人[1-2],主要用于帮助患者进行康复训练[3],对改善患者下肢运动功能有显著效果[4-5]。研究人体步态对患者的训练效果有重要影响[6]。下肢康复机器人步态是指机器人在辅助患者进行康复训练时,下肢外骨骼末端及各关节在时间与空间上的对应关系,一般通过机器人末端位置或关节运动角度来定义[7]。
目前下肢康复机器人轨迹规划大体分为三类。仿生学法,通过测量和分析人体步态特征为机器人进行规划。模型法,即简化人体模型,通过其逆运动学分析进行规划。稳定判据法,即给定机器人一些运动约束,多采用零力矩点法进行规划[8-10]。熊涛等[11]设计了直线和圆弧相结合的轨迹;张冬[12]设计圆周轨迹和直线轨迹,实现了圆周踏车运动和直线蹬腿运动;刘洪涛[13]进行直线运动轨迹规划和圆周运动轨迹规划;史小华[14]进行脚踏车运动规划及单关节和多关节被动训练研究;许朋[15]规划小圆弧轨迹、直线模式轨迹和大圆弧模式轨迹;张立勋等[16]进行往复步态椭圆轨迹规划;还有下肢康复机器人设有直腿抬高运动模式[17]。综上所述,下肢康复机器人常见的运动模式有:膝关节单关节运动模式、直腿抬高运动模式、直线蹬腿运动模式和圆周踏车运动模式。
本研究针对下肢康复机器人康复运动模式,在人体关节活动度和下肢康复机器人关节运动范围双重约束下,采用模型法规划下肢康复机器人运动模式,通过机器人末端运动轨迹与关节角度的数学关系及末端位置与下肢外骨骼腿杆杆长的几何关系进行运动模式逆运动学分析,并利用C#设计运动模式求解系统,进行适应个体差异运动模式关节角度值的求解,最后在物理样机上进行实验。
1 下肢康复机器人
1.1 结构
本研究设计的下肢康复机器人适用于身高1500~1900 mm、有下肢运动功能障碍的患者,其下肢外骨骼结构能适应不同患者的生理特征,为患者提供个性化治疗。下肢康复机器人机械结构见图1。下肢康复机器人外骨骼的大腿杆和小腿杆长度可根据患者的大腿长度和小腿长度进行调节,左右肢之间的距离可以通过左右髋部调节机构进行调节,为适应个体差异的下肢康复机器人运动模式求解奠定基础。
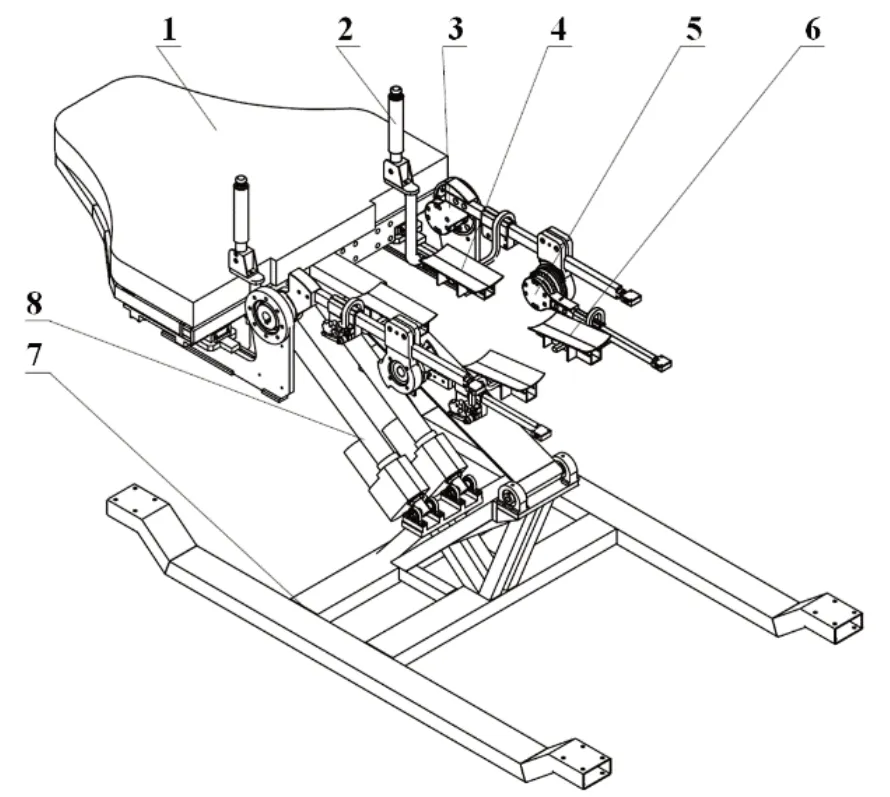
图1 下肢康复机器人机械结构图
1.2 关节角度
安全性是下肢康复机器人的重要研究内容[18-19],确保人体安全和机器安全是研究下肢康复机器人的首要问题。人体每个关节自由度数量不同,且都有明确的允许活动范围。下肢康复机器人外骨骼的运动范围限定,由机器人髋关节和膝关节的硬件限位装置解决。下肢康复机器人为患者提供康复训练时,关节运动角度须同时满足人体下肢关节活动度和下肢康复机器人关节运动范围。
人体下肢髋关节和膝关节主要在矢状面内进行屈伸运动[20-21]。本研究设计的下肢康复机器人髋关节和膝关节也只在矢状面进行屈伸运动,即髋关节和膝关节各只有一个自由度。下肢康复机器人的髋关节和膝关节的运动范围和人体在矢状面内的屈伸活动度见表1[22-23]。
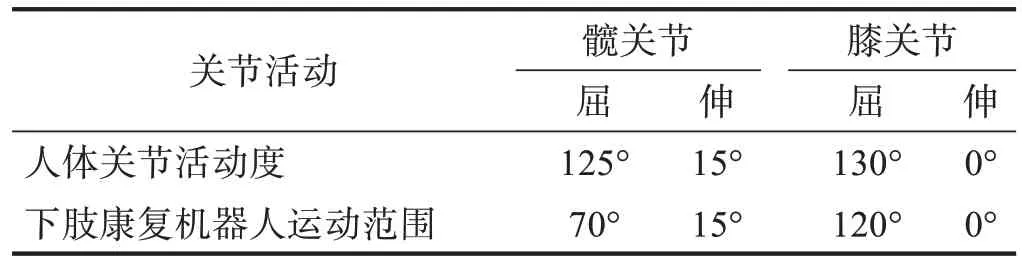
表1 下肢关节活动范围
人体多刚体假设(rigid body assumption,RBA)是一种基于人体生物力学的基本理论,该理论将人体各部分肢体假设为刚度足够大的刚体,将人体视为由多个刚体组成,刚体与刚体之间通过铰链连接,相邻两个刚体之间的自由度根据所研究的对象确定[24-25]。根据RBA理论,将下肢康复机器人外骨骼简化成二连杆刚体模型对运动模式展开研究。定义下肢康复机器人膝关节角度α为大腿杆延长线与小腿杆的夹角,髋关节角度β 为大腿杆与水平线的夹角。见图2。由于膝关节角度一直位于大腿杆延长线下方,规定α≤0°。
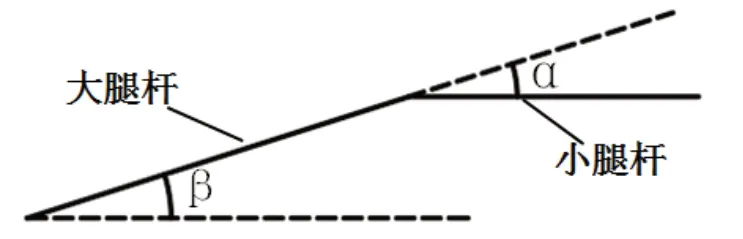
图2 髋关节和膝关节角度定义
2 下肢康复机器人运动模式
2.1 运动模式
下肢康复机器人主要功能是为下肢运动功能障碍患者提供康复训练,需要将人体正常步态复制到机器人外骨骼,外骨骼按照正常步态运动,从而带动患者下肢以人体正常步态进行康复训练。参照常见的下肢康复机器人运动模式,本研究根据康复机器人外骨骼末端轨迹共规划6 种运动模式,分别是髋关节单关节运动模式、膝关节单关节运动模式、直线运动模式、小圆弧运动模式、圆周运动模式和椭圆运动模式。见图3。根据人体关节活动度和下肢康复机器人关节运动范围,结合6 种运动模式的特点,给出6 种运动模式的关节运动角度约束条件。见表2。
下肢康复机器人在训练过程中,左右腿是周期性往复运动,除圆周运动模式和椭圆运动模式外,其他4 种运动模式在到达各自关节活动度的限值处进行换向,运动为往复对称式训练,运动过程有正反行程之分,两个行程关节运动角度大小相同,方向相反,训练幅度相同,故在设计运动模式时,仅进行单腿单程运动规划。本文仅以直线运动模式展开论述。
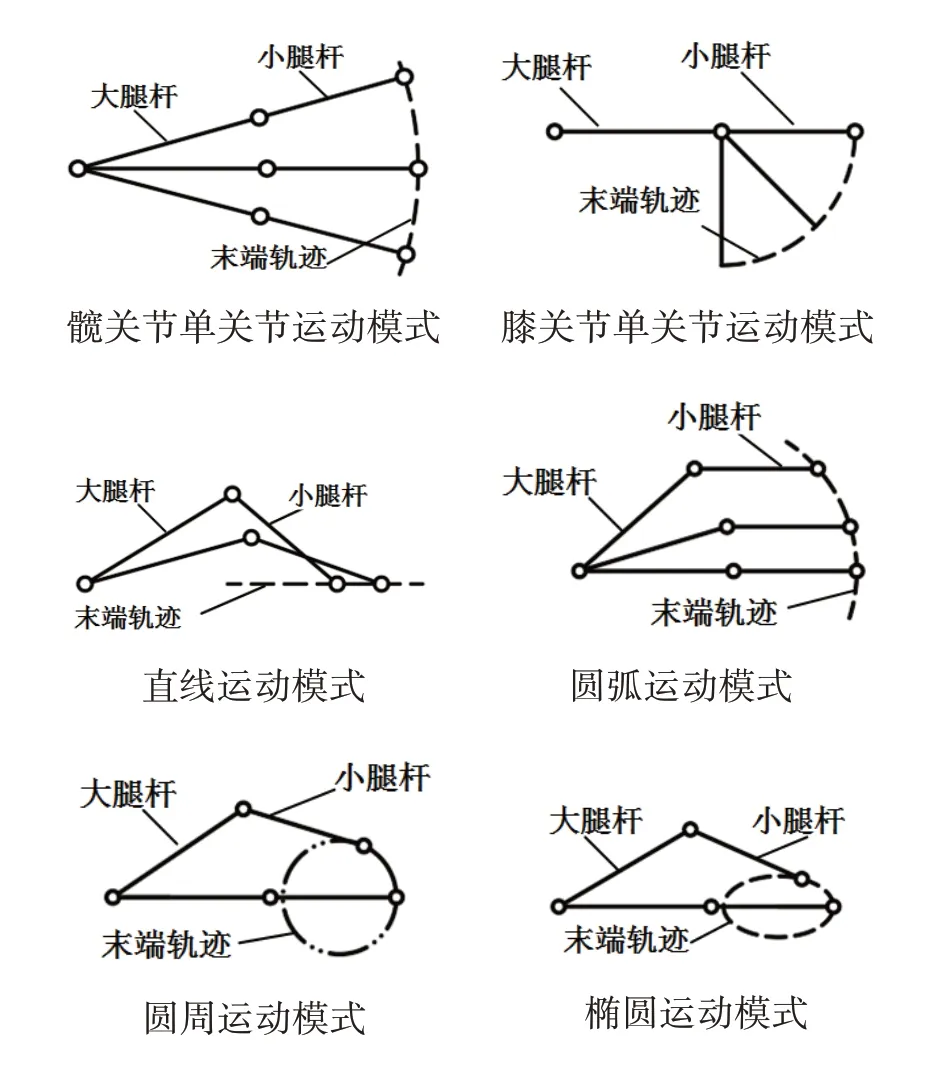
图3 运动模式简图
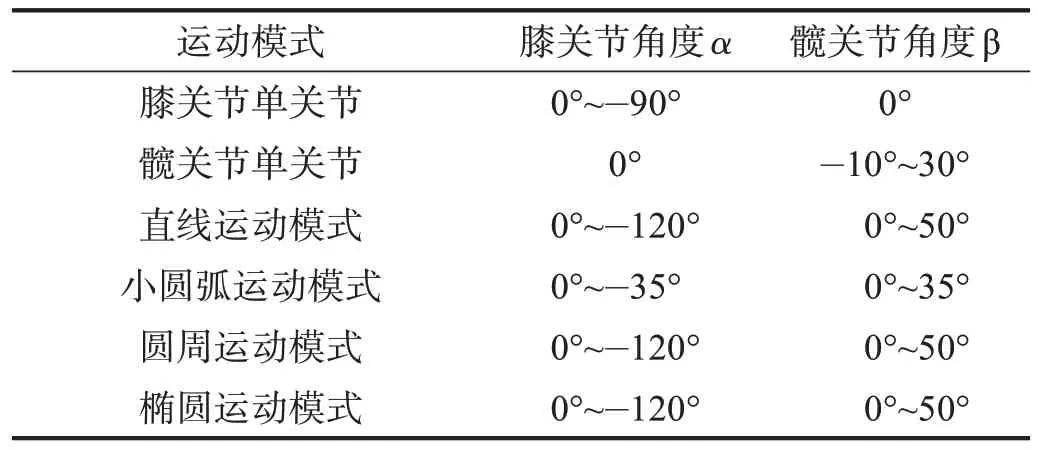
表2 六种运动模式约束条件
2.2 直线运动模式逆运动学求解
根据人体关节活动度和康复机器人关节运动范围设计直线运动模式末端轨迹为300 mm 直线段,假设大腿杆长度为l1、小腿杆长度为l2,小腿杆末端位置为(x,y)。
下肢康复训练机器人外骨骼的大腿杆、小腿杆以及水平直线段组成一个三角形(图4)。
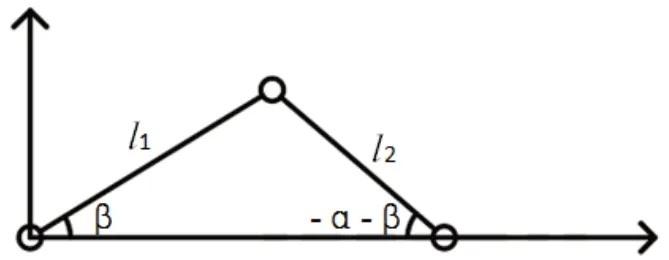
图4 直线运动模式杆件几何关系
三角形正弦定理:

假设下肢康复训练机器人外骨骼末端以速度v(mm/s)进行直线康复运动模式训练,末端位移为s(mm),根据末端轨迹方程:

根据下肢康复训练机器人外骨骼的大腿杆长度、小腿杆长度以及末端位置坐标之间的几何关系可得:

由式(1)和式(3)得出:
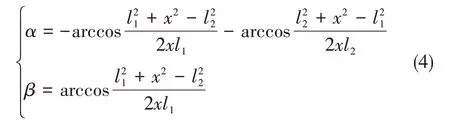
将式(2)代入式(4),即可求解髋关节和膝关节的角度值:
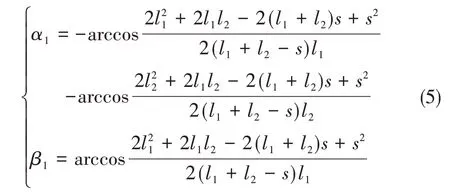
由式(5)可知,直线运动模式下关节角度除了与大腿杆长度l1和小腿杆长度l2有关外,还与小腿杆末端位移s或末端运动速度v有关,为使机器人能够平稳地运行,给患者更舒适地康复训练体验,采用四次多项式对v进行加减速规划,令v=m(t),即:

对m(t)进行一次积分,得小腿杆末端的位移s(t)为:

假设下肢康复机器人完成300 mm 的直线段需要2 s,则:

对式(10)进行一次积分,踝关节的位移为:

结合式(5)和式(11)可以求解出直线运动模式的关节角度值,直线运动模式下的关节角度值与大腿杆和小腿杆杆长有关,即该模式下的髋关节和膝关节角度值是因人而异的,不同腿长患者的关节角度不同。
3 适应个体差异的运动模式求解
3.1 运动模式求解界面
不同腿长的患者,康复运动模式不同。为实现适应不同生理特征患者的运动模式关节角度值求解,通过运动模式逆运动学分析并结合6 种运动模式的关节约束条件,基于C#设计运动模式求解系统,流程见图5。
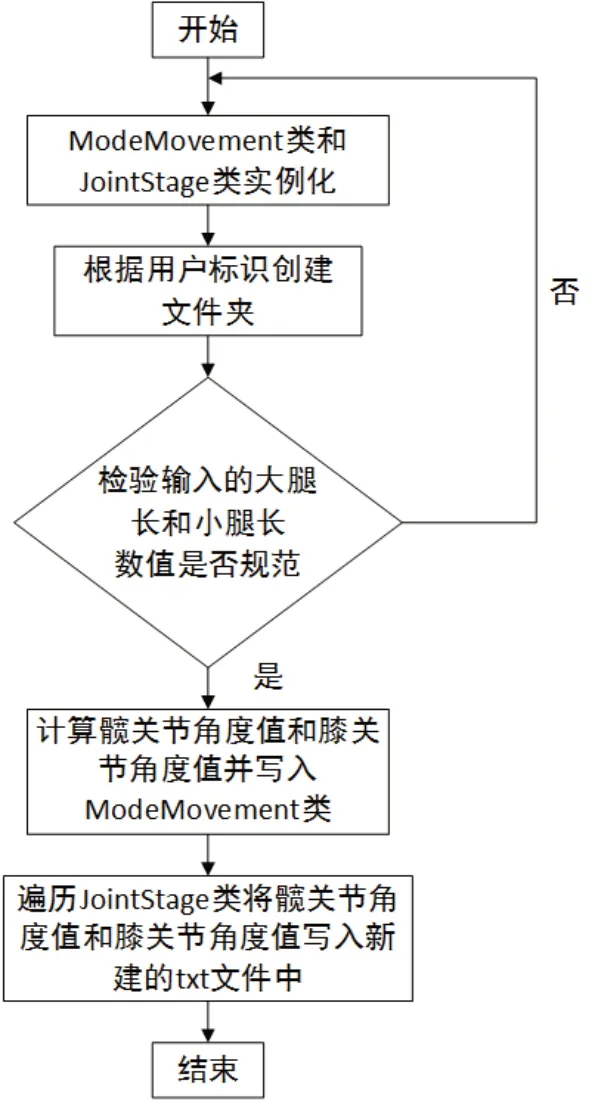
图5 C#运动模式求解流程图
下肢康复机器人适应个体差异的运动模式求解系统界面(图6)包含3 个区域。第1 区域为患者信息输入区域,患者信息包括患者ID 号、大腿长和小腿长。第2 区域为运动模式求解区域,在实际使用时,点击6种运动模式对应按钮,可以实现对运动模式的求解,并将求解结果.txt 格式文件以“运动模式+当前时间”为名存储在以患者信息为名的文件夹中。第3 区域为运动模式简图展示区域。
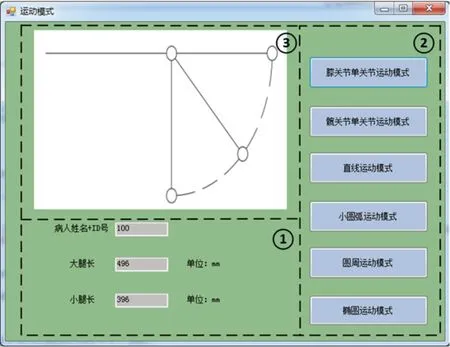
图6 运动模式求解系统界面
4 实验验证
利用下肢康复机器人物理样机对基于C#适应个体差异的下肢康复机器人运动模式进行实验验证。根据《GB/T 10000-1988 中国成年人人体尺寸》,选择表中符合下肢康复机器人适用范围的最低身高1504 mm、最高身高1830 mm 及中间值1750 mm 身高进行直线运动模式实验验证。下肢康复机器人物理样机由下肢康复机器人机械本体、电气控制柜和上位机三部分组成(图7)。
将从运动模式求解系统中求解出来的直线运动模式关节角度数据传输到上位机,进行验证实验。人体下肢的运动是周期性的,左右肢的运动相差半个周期,下肢康复机器人直线运动模式左右髋关节和左右膝关节的运动也分别相差半个周期,且左髋关节和左膝关节分别比右髋关节和右膝关节提前半个周期。在下肢康复机器人物理样机上进行直线运动模式验证时,利用上位机控制器采集关节电机编码器反馈的脉冲数,能够获得关节运动角度随时间变化的曲线及各关节的跟踪误差。上位机定时通过控制器采集关节电机编码器反馈的脉冲数获得的髋关节和膝关节两个周期的关节运动角度曲线见图8。三种身高的髋关节和膝关节角度跟踪误差见表3。
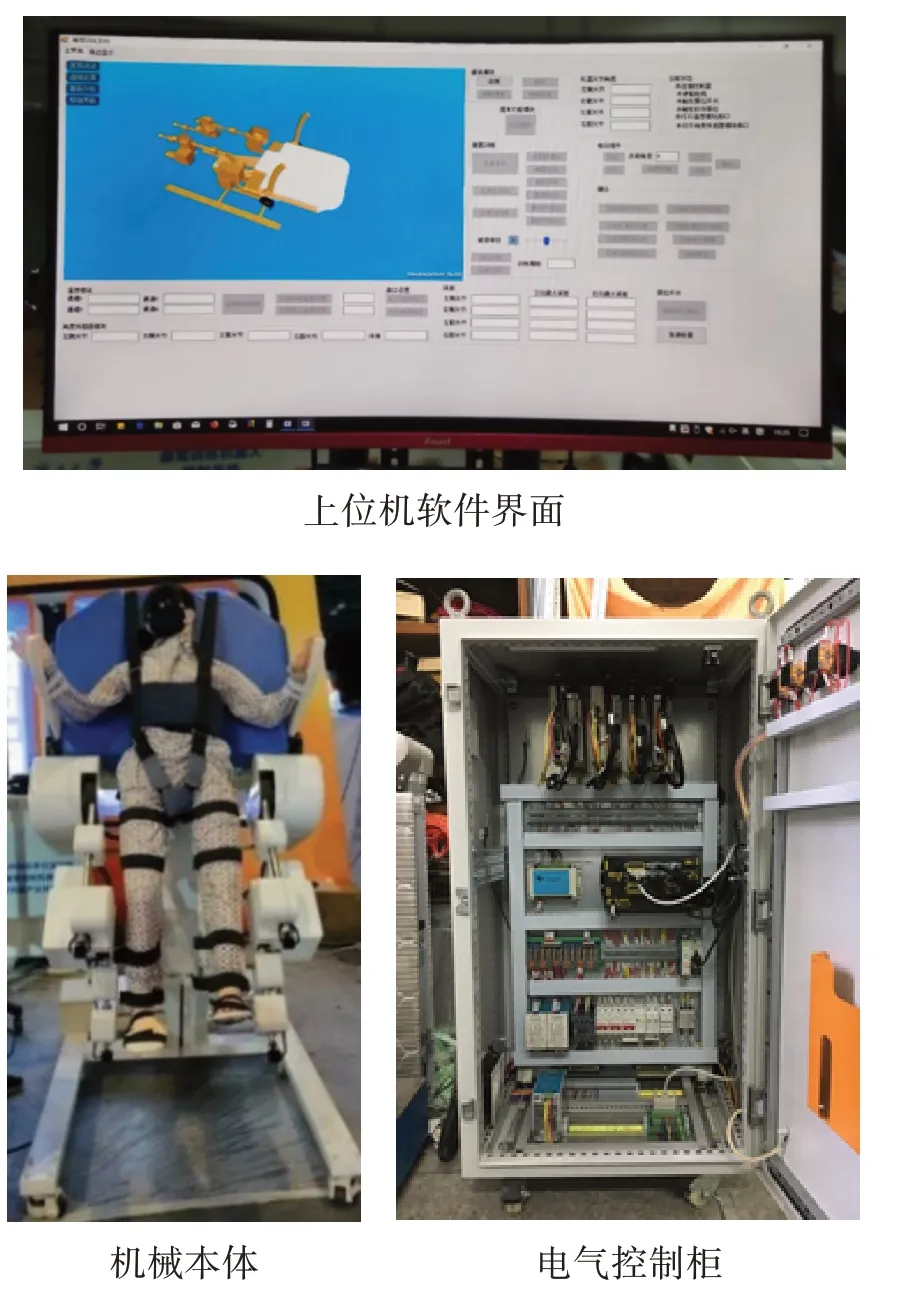
图7 下肢康复机器人物理样机
基于C#的下肢康复机器人运动模式求解系统计算的直线运动模式理论关节曲线与在物理样机上实验的实际关节曲线基本一致(图8)。虽然运动模式的实际关节角度与理论关节角度大小有一定的偏差,但关节角度误差较小,可以达到康复训练目的,且机器人康复运动模式的实际关节角度曲线平滑,机器人工作过程中下肢外骨骼运行平稳,能够给患者带来良好的康复训练体验,说明基于下肢康复机器人逆运动学分析的运动模式求解系统是可行的。
5 小结
本研究通过下肢康复机器人逆运动学分析,进行适应个体差异的康复运动模式步态规划,并成功将求解的运动模式关节角度数据应用于下肢康复机器人物理样机,说明基于C#进行下肢康复机器人康复运动模式规划是可行的,且设计的用户界面操作简单,便于配机使用。应用下肢康复机器人进行康复训练时,不仅外骨骼机械结构能够根据患者腿长进行调节,而且康复运动模式能够适应个体差异,患者能够得到个性化康复训练,使训练效果更有效,实现精准康复。
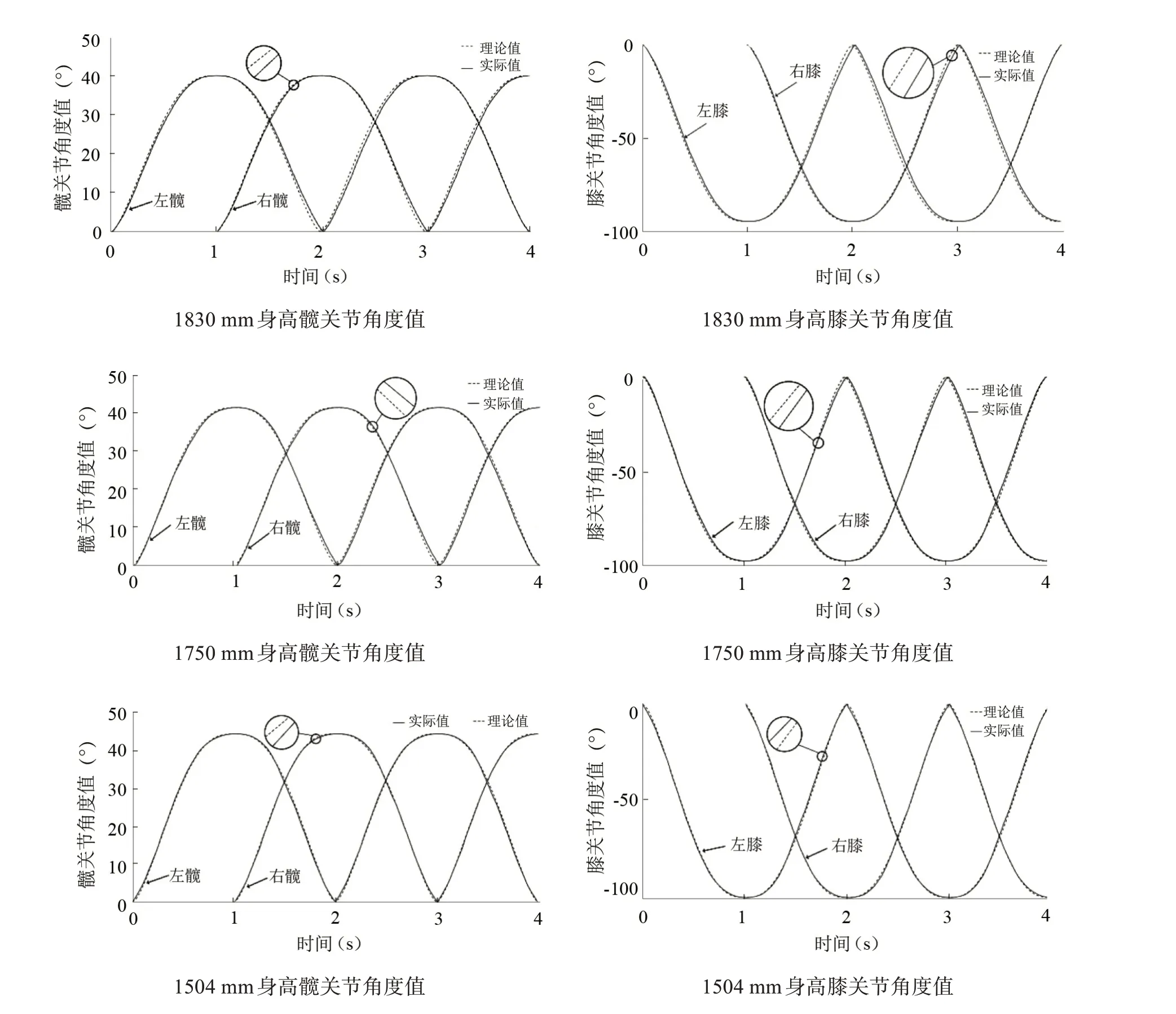
图8 三种不同关节角度曲线

表3 三种不同身高关节误差(°)
猜你喜欢
临床骨科杂志(2022年5期)2022-11-05 09:27:54
作文小学高年级(2022年3期)2022-04-20 08:17:04
装备制造技术(2020年11期)2021-01-26 00:38:58
冰雪运动(2020年4期)2021-01-14 00:56:02
中华养生保健(2020年2期)2020-11-16 00:49:06
福建中学数学(2018年1期)2018-11-29 02:52:14
37°女人(2017年8期)2017-08-12 11:20:48
滇池(2017年7期)2017-07-18 19:32:42
中华骨与关节外科杂志(2017年1期)2017-05-17 06:11:27
制造业自动化(2017年2期)2017-03-20 14:26:12
