基于SUPL的AGPS定位优化
2020-12-31 06:20:18
广东通信技术 2020年11期
1 引言
随着定位导航技术的进步与普及,全球定位系统(GPS,Global Positioning System)的应用也变得愈发地重要和多样化,为环境检测、科学研究、精细农业、突发事件及灾害评估、航天航空工程等各个领域提供了实时、全天候和全球性的定位导航服务。GPS全球定位系统由空间星座部分、地面监控部分和用户设备部分组成。空间星座部分接收从地面监控部分发射的导航信息,并通过执行控制指令调整自身的运行姿态。地面监控部分主要负责信息的监控和传输,更新星历参数,监视卫星的运行轨道并发送相关控制指令。用户设备部分可理解为GPS接收机,主要包括接收机主机、天线和电源[1]。继GPS定位系统的成功设计与应用之后,中国等其它国家又相继研发出自己的导航定位系统,如北斗、GLONASS、GALILEO等卫星定位系统[2,3,4]。在全球卫星定位技术的基础上又研发出RTK(Real Time Kinematic)定位[5]、PPP(Precise Point Positioning)定位[6]等相关定位技术使得定位速度变得更快、定位结果更加精确。
在GPS接收机测量和定位前需对卫星信号进行接收,从而实现对数据进行解码。由于捕获卫星信号的时候GPS接收机不携带任何先验信息,所以接收机需要进行高维度的频率及码延迟空间搜索,这种方式称之为冷启动。对于冷启动的接收机,首次定位时间最少为1分钟。同时,如果在启动过程中信号被阻碍或者衰减了,则可能发生数据错位,接收机需再等待30秒钟直到辅助信息再次被发送。为了减小接收机定位时长,研究人员研发出辅助GPS(AGPS,Assisted GPS)定位系统[7]。该系统利用基站向GPS接收机发送相关先验信息(如星历信息等),解决了接收机自行搜索卫星带来的搜索时间过长的问题,在保证了定位精度的同时,大大地减小了接收机定位所需的时间。
安全用户层定位技术(SUPL,Secure User Plane Location)是由开放移动联盟(OMA,Open Mobile Alliance)组织推动的安全用户层定位服务。SUPL利用用户层的数据来承载传输定位辅助信息例如GPS辅助数据,并规定了移动终端和网络之间定位数据传输的相关协议[8]。安全用户层定位技术不仅规范化了相关的定位服务,还促成安全、稳定、可靠的辅助定位流程。
本文研究了基于几何精度因子的快速选星算法,根据观测卫星的数量、仰角、信号信噪比及空间几何分布情况,筛选出最佳的定位卫星组合。在此基础上,本文还根据定位接收机对不同卫星观测量的观测误差而构建权重模型,并将构造的权重与最小二乘算法相结合,实现了加权最小二乘定位算法,进一步提升了AGPS定位系统的定位精度。
2 AGPS定位原理
2.1 GPS伪距定位原理
发射的卫星信号中调制了精密的时间信息、卫星健康信息、卫星星历数据以及历书数据。伪距(Pseudo-Range)是GPS接收机对码相位的测量而得到卫星到接收机的距离,由于含有接收机、卫星时钟的误差和大气传播误差,故而称为伪距[9],伪距可表示成式(1)。
GPS定位系统中使用WGS-84坐标系统[10]表示空间中的坐标。终端用户通过实现对4颗以上可见卫星的测量得出包含各种误差信息的伪距。终端利用接收到的卫星星历数据计算出可见卫星的坐标位置后,根据图1的空间关系求解式(2)得出定位坐标和对应的接收机钟差。
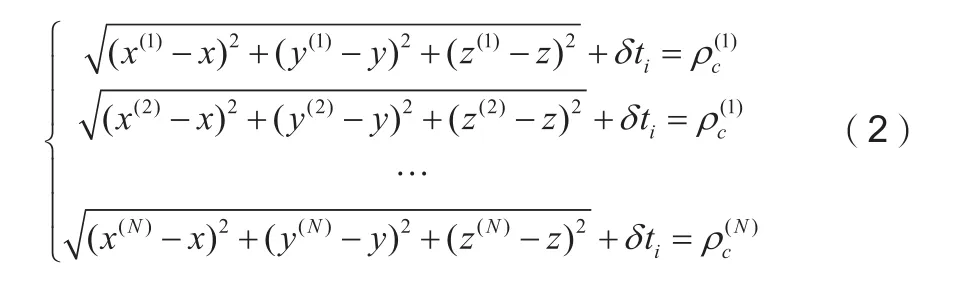
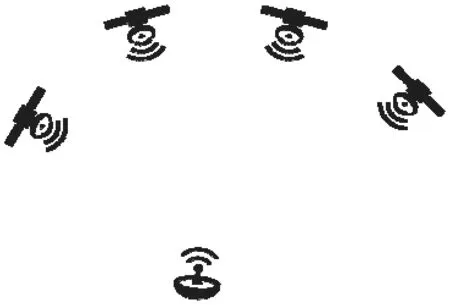
图1 GPS空间定位几何关系
由于不易求解式(2)的非线性方程组,利用泰勒公式对式(2)构成的四元方程组在点处展开使之线性化后如式(3),

2.2 AGPS定位流程
在定位过程中,AGPS通过蜂窝网络传输并获取伪距和星历数据等辅助数据。基于SUPL的AGPS定位框架如图2,该系统框架主要由具有GPS接收机模块、支持SUPL的手机终端设备和卫星定位服务器组成。卫星定位服务器连续跟踪当前可见的GPS卫星,并存储和传送接收到的星历数据、历书数据、电离层延时矫正模型参数、UTC时间模型参数。

图2 AGPS定位框架
(1)手机终端设备通过蜂窝网络获取附近基站的小区标识来获取大致地理位置,并通过蜂窝网络与定位服务器共享。
(2)定位服务器与终端设备建立安全网络链接后,发送请求(RequestCapabilities)告知定位支持的能力;手机终端设备则响应请求,提供自身拥有的定位能力。或者手机终端自发地提供自身的定位能力。
(3)手机终端设备向定位服务器发送请求辅助数据(RequestAssistanceData)。定位服务器响应请求的辅助数据。
(4)手机终端利用定位服务器提供的辅助数据和手机终端对当前可见卫星的伪距测量信息,实现手机终端的位置计算。
(5)定位服务器发送定位信息请求(RequestLocationInformation)获取手机终端的定位结果。
在AGPS定位流程中,定位服务器通过筛选当前小区上方可见卫星并将辅助数据下发到移动手机终端,大大减少了手机搜索捕获卫星的时间。基于SUPL的AGPS定位模式分成MSA(MS-Assisted)和MSB(MS-Based)。两种定位方式的区别在于最终定位结果的计算方式不同。在MSB定位中,系统将辅助数据下载到定位终端后由定位终端自行完成定位结果计算,并将计算结果上传到定位服务器;在MSA定位中,系统将辅助数据下载到定位终端后,定位终端对可见卫星进行观测,并将观测量上传到定位服务器,最终由定位服务器解算出终端位置并将计算结果下载到定位终端。
3 AGPS定位优化
在AGPS系统定位中,影响卫星定位精度的原因主要有两种,首先是由于电离层、对流层等大气层使得伪距测量误差较大,无法通过相关数学模型完全较正伪距误差[11];其次是未能对卫星的空间分布进行分析,使得用于定位的卫星空间分布较差或者卫星高度角较小。针对上述两个问题,本文首先去除较差的卫星信号信噪比和卫星高度角并通过GDOP因子对较优的卫星组合进行筛选;其次通过加权最小二乘法利用权重的思想优化迭代计算过程中的每一次测量结果,对于终端测量中伪距误差较大的测量值设置较小的权重,误差较小的测量值设置较大的权重。
3.1 GDOP因子选星
用于定位的卫星空间分布的优劣性使用GDOP因子来描述,GDOP越小则空间分布越好[12]。下面对GDOP因子的计算作简要分析。
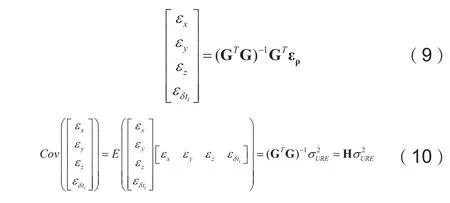
则定位误差可表示成式(9),定位误差的协方差矩阵可表示成(10)。

为了快速求出GDOP最小的卫星组合,可以先通过三颗卫星的观测矢量构成的体积法快速求出最优的三颗卫星组合。如图3,三颗卫星和终端构成一个相应的空间体积。3颗卫星A、B、C与终端P分别构成的单位向量。令卫星的坐标为根据几何关系可以得到3颗卫星与终端构成四面体的体积。
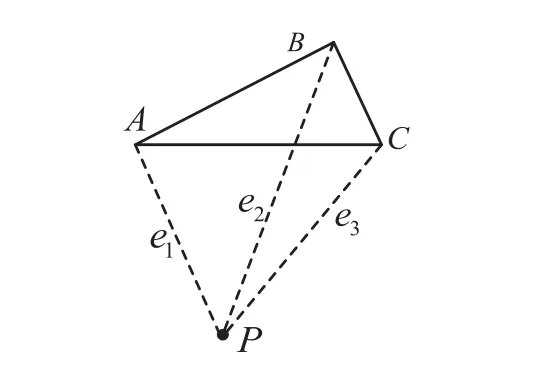
图3 卫星和终端的几何分布图
GDOP因子选星具体步骤如下:
(1)先后按卫星高度角和卫星信噪比值排序后,滤除高度角小于5度,信噪比值小于30的卫星。得到剩余颗可见卫星,当小于4时结束选星步骤。
(2)求出终端对所有3颗卫星组合的观测矢量。根据观测矢量求出卫星和终端构成的体积最小的3颗卫星序号。使用表示卫星集合的数量,此时为3。
3.2 加权最小二乘法
由于地理环境原因和接收机噪声,对不同卫星在实际测量过程得到的不同伪距包含了各种测量误差。这些误差包括电离层延时误差、对流层延时误差、多路径误差、星钟误差、星历误差、轨道误差、接收机噪声误差等[13]。与卫星相关的误差主要由于GPS地面监控部分对卫星的运行轨道和卫星时钟进行测量、预测,得到不准确结果而造成。与传播过程相关的误差由于在传播过程中受大气层中电子和离子的干扰,造成延时传输从而形成电离层和对流层延时误差。其中电离层延时误差可造成2~100 m的测量误差,影响较大。与接收机相关的误差包括接收机噪声和硬件误差,在不同环境下还存在多路径效应和电磁干扰。
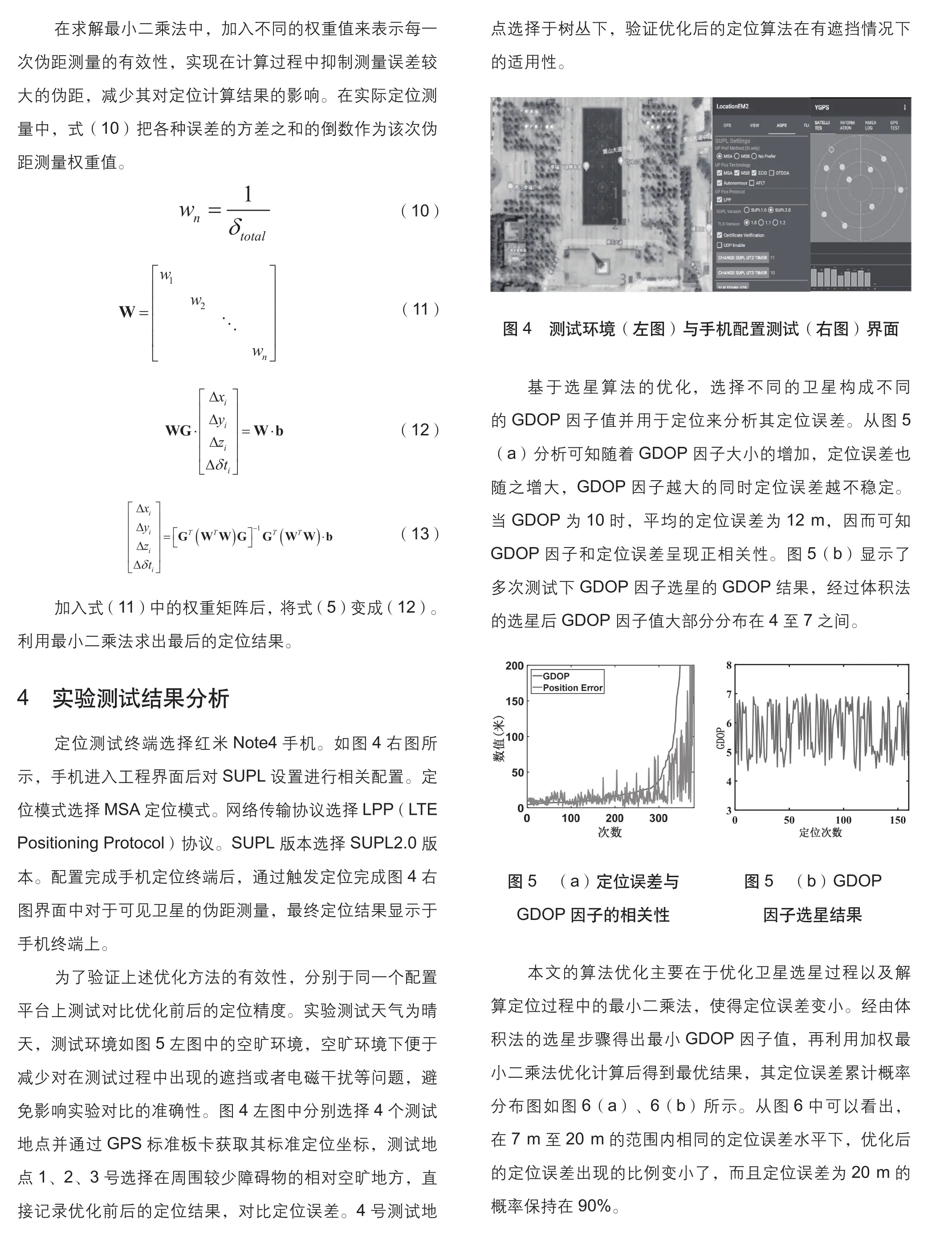
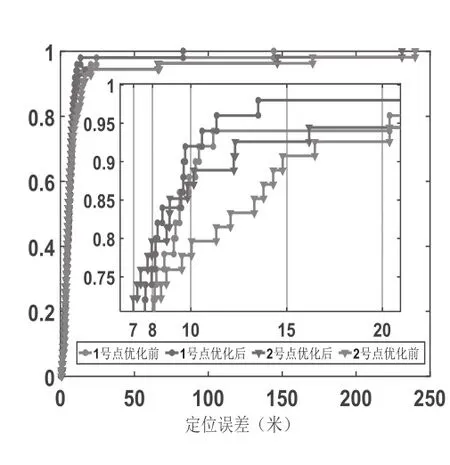
图6 (a)第1号和2号定位测试点
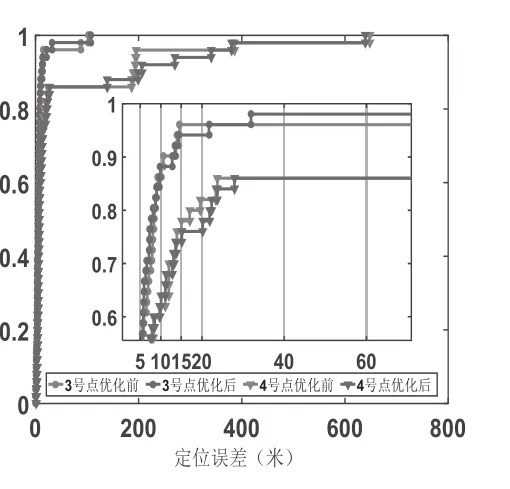
图6 (b)第3号和4号定位测试点
从定位误差累计分布图可以看出,不同的测试环境定位精度存在一定的差异。平均定位误差如表1所示,其中1、2、3号测试地点环境空旷定位误差在10 m,4号测试点环境受遮挡影响较多定位误差上升到30 m。优化后测试地点的平均定位误差不仅下降了2 m,而且定位误差方差也变小了。平均定位误差在20 m、50 m定位分布概率如表2所示,经过优化后满足20 m的平均定位概率在90%。同时在遮挡较差的测试环境下,大部分定位结果的定位误差相较于优化前得到大幅度的下降。

表1 平均定位误差和方差
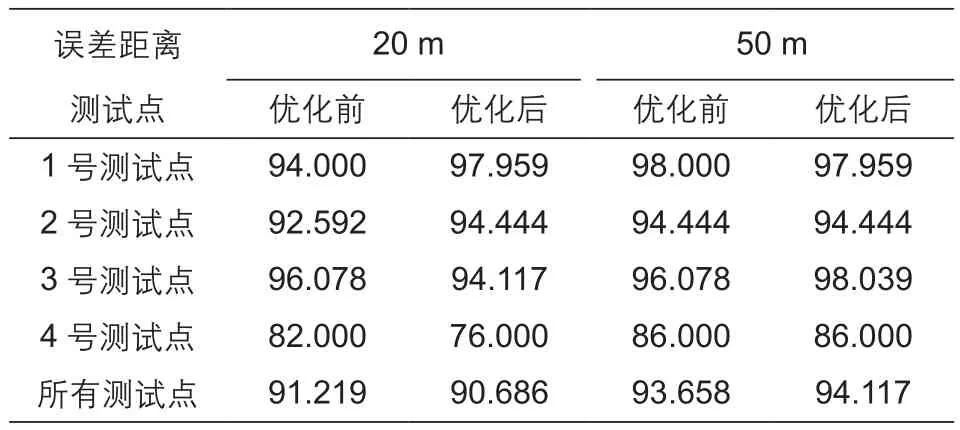
表2 定位误差20 m和50 m定位概率
5 结束语
本文介绍了GPS定位的基本原理和AGPS的定位流程,分析了在AGPS定位过程中影响定位精度的两个重要原因,即伪距测量误差和卫星空间分布。针对上述两个影响定位精度的原因,介绍了如何使用GDOP因子选择最优的卫星组合,实现最优的卫星空间分布获取;在此基础上,引入测量误差权重,使用加权最小二乘法计算最终定位结果。基于上述优化方法,定位结果显示优化后的AGPS定位精度提升了2 m。同时,对于环境较差的大误差点经过优化后得到较为满意的结果。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年6期)2018-11-25 09:50:18
测控技术(2018年4期)2018-11-25 09:47:22
电子制作(2018年19期)2018-11-14 02:36:40
测绘科学与工程(2017年3期)2017-08-16 02:46:08
测绘通报(2016年12期)2017-01-06 03:37:13
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
导航定位学报(2015年2期)2015-06-05 09:27:38