基于先验相位结构信息的双基SAR两维自聚焦算法
2020-12-31 03:34:04施天玥刘惠欣刘衍琦毛新华
雷达学报 2020年6期
施天玥 刘惠欣 刘衍琦 毛新华
(南京航空航天大学电子信息工程学院雷达成像与微波光子技术教育部重点实验室 南京 211106)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)是利用小孔径雷达运动,并对雷达在不同位置的回波进行相干处理,从而生成高分辨率场景图像的一种高分辨率雷达系统。通常传统SAR指的是单基地合成孔径雷达,即发射机和接收机位于同一平台上。单基SAR由于系统实现和成像处理相对简单,其研究开发已较为成熟。近年来,双基地合成孔径雷达也已逐渐成为研究的热点。相比于单基SAR,双基地合成孔径雷达(bistatic SAR)收发分离的特点使其比单基SAR具有更多的优势,如系统设计更灵活,获取目标散射信息更丰富,抗干扰性更强等[1]。然而,双基SAR复杂的成像几何特性以及运动平台的增加也对其系统实现和成像信号处理提出了更高的要求。对于系统实现而言,最大的挑战在于发射机和接收机同步,包括时间同步,空间同步和相位同步。而对于成像信号处理,主要的技术挑战在于成像算法和自聚焦算法的实现。一方面,由于双基地SAR的距离历程是双曲线,其成像处理很难获得精确的点目标频谱,因此无法得到基于频谱模型的高效频域成像算法。在实际应用中,时域算法应用最广泛,如滤波反向投影算法(Filtered Back Projection,FBP)。另一方面,精确高效的成像处理需要准确估计雷达的飞行路径。但在双基SAR中,双平台运动测量单元提供的位置信息精度往往无法满足精确聚焦成像需求,同时信号在不均匀介质中传播所产生的回波延迟误差也往往不能被忽略[2–4]。因此双基SAR自聚焦处理的难度远大于单基SAR。近年来,针对这些挑战,双基地SAR系统同步和成像算法已得到了很好的发展。相比之下,双基地合成孔径雷达的自聚焦算法研究却进展较少,这也将是本文研究的重点。
由于测量或者传播介质扰动的影响,雷达回波中会产生方位相位误差(Azimuth Phase Error,APE)和残留距离徙动(Range Cell Migration,RCM)。其中APE导致图像方位向散焦,残留的RCM引起方位和距离向的二维散焦。在雷达回波相位历史域中,APE是残留RCM与常数因子4π/λ的乘积(λ为波长)[5],它们之间是一种简单的线性关系。但经过成像处理后,该线性关系却不再成立,而且距离频域还会产生高阶相位误差导致距离方向上的再次散焦。在双基SAR系统中,当距离误差相对较小时,如距离误差小于1个距离分辨率单元时,可以直接忽略残留RCM的影响,仅需补偿APE。在这种情况下,可用传统的自聚焦方法如一维相位梯度自聚焦算法(Phase Gradient Autofocus,PGA)[6]来估计和补偿方位一维相位误差。但随着双基SAR分辨率的提高以及误差的增加,残留RCM跨距离单元将成为无法避免的问题。因此,两维相位误差估计和补偿(即两维自聚焦)在双基SAR成像中将成为不可忽视的问题。
当前,针对双基SAR自聚焦的研究公开报道的还很少,其中,文献[7]阐述只要双基地合成孔径雷达图像是在特定的参考系中形成的,单基地自聚焦算法如PGA同样适用于双基地合成孔径雷达图像。文献[8]提出了一种用于双基地合成孔径雷达的方位相关相位梯度自聚焦算法。然而这些算法都只能解决一维方位相位误差问题,仅考虑了在双基SAR系统中,距离误差相对较小时,可以直接忽略残留RCM的影响,仅需补偿APE的情况。但当残留RCM跨距离单元时,两维相位误差的估计和补偿则是平台机动条件下双基地SAR精确聚焦成像的重要保障。目前,已有文献中关于两维自聚焦的唯一工作是由Pu等人[9]完成。他们将双基SAR图像中的残留两维相位误差近似为APE和残留RCM的结合,基于此条件提出了一种有效的RCM校正方法。然而,随着分辨率的提高,这种近似方法会失效,特别是在使用非高精度运动传感器的条件下。此前,本课题组已提出了一种基于先验知识的单基SAR两维自聚焦算法[10],该方法可以准确补偿单基SAR图像中的残留两维相位误差。但是,由于双基SAR图像中的残留相位误差与单基SAR图像中的残留相位误差具有不同的特性,因此,单基SAR自聚焦算法不能直接应用在双基SAR自聚焦处理中。
本文从双基SAR极坐标格式(Polar Format Algorithm,PFA)算法的新解释入手[11],利用该解释,详细分析距离和方位重采样对残留两维相位误差的作用机理,揭示了双基PFA成像中残留两维相位误差的结构特征。利用这一先验知识,提出一种高效精确的降维自聚焦方法。新算法只需要直接估计一维方位相位误差,然后利用两维相位误差与一维方位相位误差的解析关系,直接从估计的一维方位相位误差中计算出两维相位误差。由于一维方位相位估计又采用了多子带数据平均参数的方法,因此该算法可以极大地提高参数估计精度,改善计算效率。
2 双基极坐标格式算法误差分析
2.1 相位误差模型
双基聚束模式SAR成像几何模型如图1所示,以坐标系的XOY平面为地面,坐标系原点与成像中心点O重合。点目标P在成像区域的坐标为(xm,ym)。不失一般性,假设发射机载机和接收机载机的飞行路径都是任意的,发射机和接收机的雷达天线相位中心的瞬时位置坐标分别为{xt(t),yt(t),zt(t)}和{xr(t),yr(t),zr(t)},瞬时俯仰角和瞬时方位角分别为φt,φr和θt,θr,且它们在孔径中心时刻分别记为发射机和接收机在t时刻与点目标P和场景中心点O的距离分别是Rt(t),Rtc(t)和Rr(t),Rrc(t)。接收机接收到的回波信号经过解调,脉冲压缩及运动补偿等一系列预处理后[12,13],简化为

其中c表示电磁波传播速度,fc表示发射信号载波频率,fr表示距离向频率,A表示回波信号幅度,ΔR表示双基雷达天线相位中心到场景中心和点目标的差分距离。
在平面波前假设条件下,式(1)中双基SAR差分距离可进行1阶泰勒展开近似

其中,
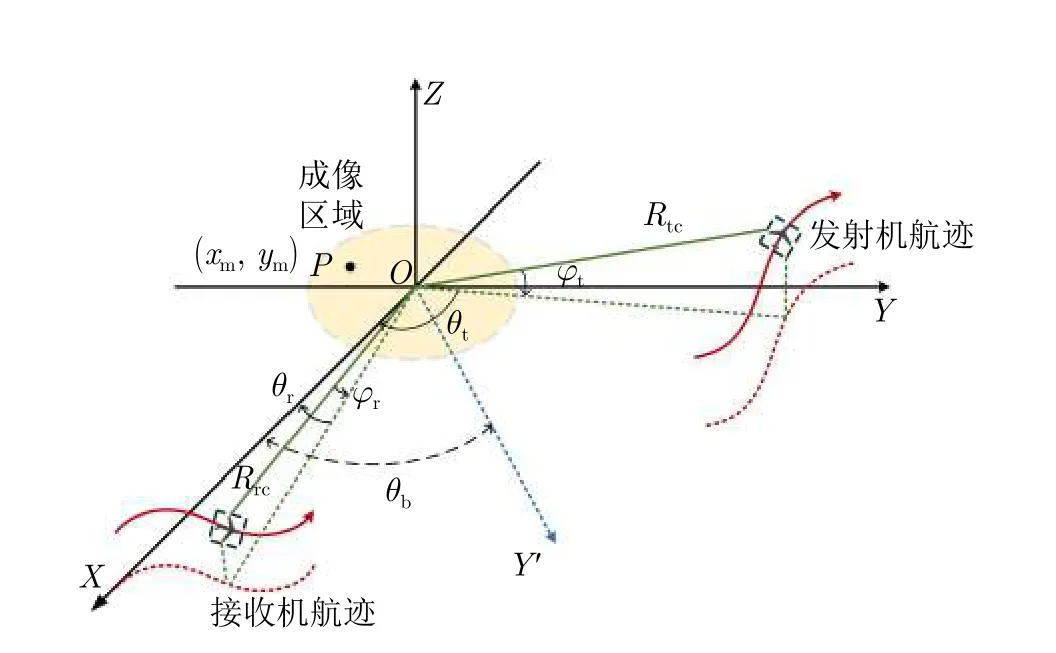
图1 双基聚束模式SAR数据采集几何模型Fig.1 Geometric model of spotlight bistatic SAR

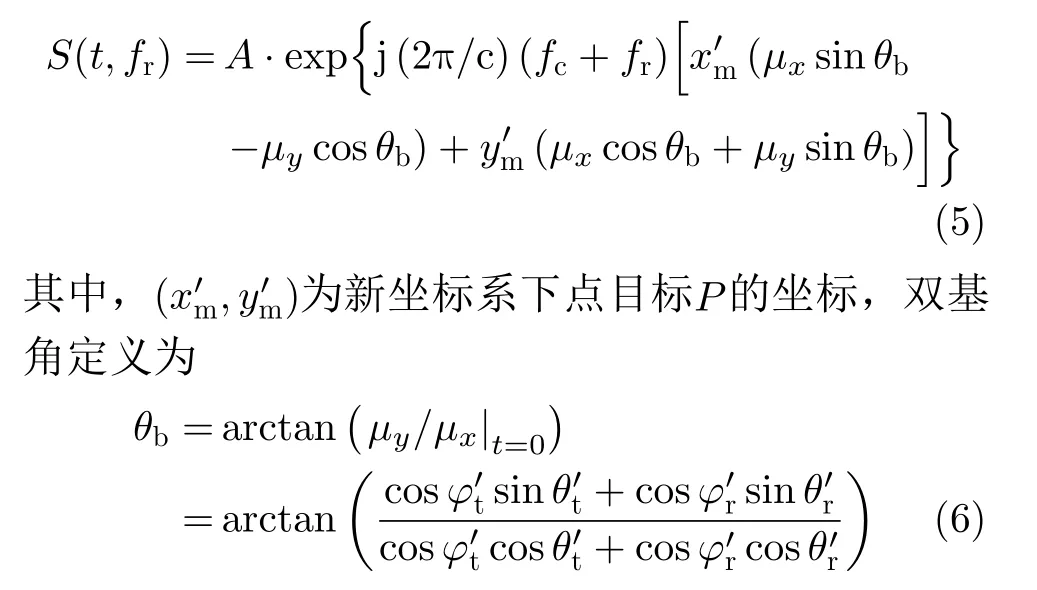
为了减少残留距离徙动量,通常选择坐标系的一个轴向与双基角方向一致,为此,我们将原有坐标系进行旋转,其旋转角度为双基角θb。将式(2)代入回波表达式(1)中,并采用新的坐标系,得到
然而,由于运动传感器测量精度和传播介质扰动等因素的影响,差分距离中会引入一个额外的误差,即双基SAR差分距离实际应表示为

其中RE(t)表示距离误差项。因此实际的雷达回波可建模为

由式(8)可知,在相位历史域中,两维相位误差由两个部分组成,即

式(9)中的第1项是方位相位误差项,它与距离频率无关,第2项为残留距离徙动,徙动量为RE(t)。可知,在相位历史域,方位相位误差与残留徙动存在简单的线性关系。
由于大部分自聚焦算法是图像后处理技术,因此我们更希望知道成像处理后,残留相位误差的组成。为此,下面我们将推导双基PFA成像后的残留两维相位误差解析结构。
2.2 残留两维相位误差解析结构分析
文献[14]提供了一种新的双基PFA解释,本文利用该解释,对双基SAR模型中的残留相位误差进行分析。双基PFA算法中,距离重采样被认为是一种距离频率上的尺度变换,方位重采样则是通过对方位时间做一个与距离频率有关的变量替换,它可以分解为RCM线性化和Keystone变换两个过程。
距离向的插值本质上是一个尺度因子为

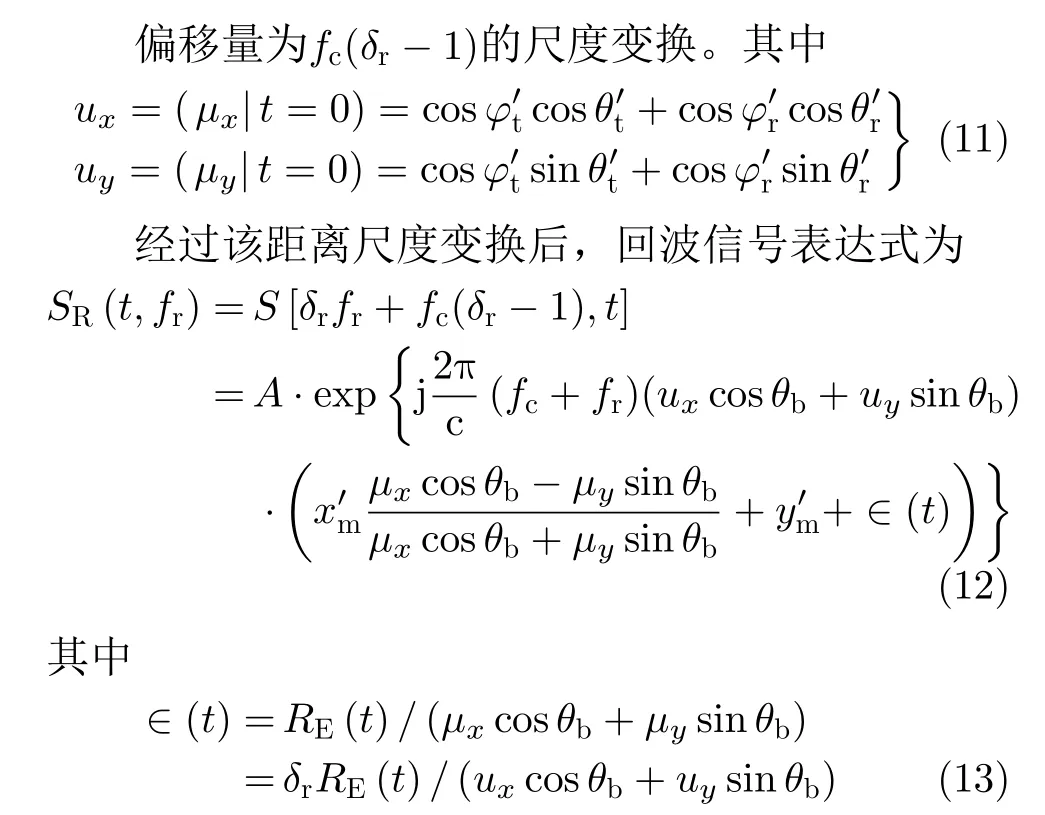
双基PFA的第2步是方位重采样,其可分解为RCM线性化和Keystone变换两过程。其中RCM线性化本质上是在方位时间域做与距离频率无关的重采样,使得(µxcosθb-µysinθb)/(µxcosθb+µysinθb)随方位时间线性变化。此过程可通过变量替换实现,即t →ϑa(t)。因此,RCM线性化后的回波信号为

是在方位向重采样过程中确定的常数。并且η(t)=∈[ϑa(t)]。最后对式(14)做Keystone变换,得到结果
可以明显看到,经过PFA后,在两维空间频域,双基SAR残留的两维相位误差在空间频域中为

为了分析残留相位误差结构,可以对式(21)在距离频率方向进行泰勒展开。考虑到距离空间频率存在一个偏置,因此在kyc处泰勒展开得到
ξ′(kx/kyc)和ξ′′(kx/kyc)分别是ξ(kx/kyc)的1阶导数和2阶导数。在式(23)中,φ0(kx)为方位相位误差,φ1(kx)为残留距离徙动,而φ2(kx)以及其它高阶项与距离散焦有关。根据式(23)易知,经过PFA处理后,方位相位误差与残留距离徙动之间原有的线性关系不再成立,而且距离向还重新出现高阶项,从而会导致距离向重新散焦。
根据式(22)和式(23),可得到两维相位误差与一维方位相位误差之间的解析关系

根据式(24)可以知道,残留两维相位误差具有固有的解析结构。如果我们知道了一维方位相位误差,可以直接计算得到残留两维相位误差。因此,利用这种固有结构的先验知识,可以将残留两维相位误差的估计问题降维成一维方位相位误差的估计问题。
2.3 误差空变性分析
残留两维相位误差本质上是空变的。对于同样的雷达航迹,不同位置的目标点会产生不同的残留两维相位误差。根据式(24)可知,两维相位误差可以完全由一维方位相位误差确定,因此对误差空变性的分析,实际只需分析一维方位相位误差的空变性即可。
在聚束模式下,成像场景范围通常相对较小,因此空变性往往可以忽略不计。为了说明这种假设的合理性,下面本文提供误差空变性可忽略的条件。不失一般性,假设图2所示成像几何。图2中发射机载机和接收机载机的飞行方向与扫描波束夹角为 90°。点目标在t时刻到发射机载机和接收机载机航线的瞬时距离分别为Rt和Rr,垂直距离分别为Rt0和Rr0。点目标到发射机和接收机的距离和为R,发射机和接收机的飞行速度分别为vt和vr

将式(25)代入雷达回波信号中,可得到方位相位调制项,近似为假设在实际飞行时,由于运动传感器测量精度和传播介质扰动等因素的影响,平台会偏离实际测量值,从而引入相位误差。为了简化分析,仅考虑有速度误差的情况。假设发射机和接收机的飞行速度存在一定的误差,即实际值分别为因此得到2次相位误差为

要想误差φ的变化量 Δφ随两维空变在测绘带内可以忽略,通常要求Δφ ≤π/2。如图2所示,假设成像场景大小的半径为r,即可得到Rt可变范围为(Rt0-r,Rt0+r),Rr可变范围为(Rr0-r,Rr0+r)。因此

图2 关于误差空变性分析的双基SAR几何模型Fig.2 Geometric model of spotlight Bistatic SAR for analysis of spatial-variant error
其中,min(x) 和max(x)分别为x的最小值和最大值。由推导的公式(26)可知,Δφ是关于时间t的二次项,当t=T/2时,T为合成孔径时间,Δφ取得最大值,此时
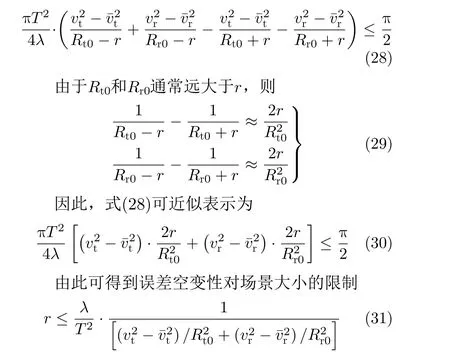
当r满足式(31)时,在整个成像场景内可不考虑残留两维相位误差空变性的影响。我们将本文仿真参数代入式(31),可计算出式(31)右边等于r ≈11.8 km,而本文的成像区域半径要远小于11 km,因此误差空变性可忽略。
误差的空不变假设也是目前绝大部分自聚焦算法(如PGA,相位差分算法等)采用的基本假设。当然,随着分辨率的进一步提高,以及成像范围的不断扩大,误差空变性估计和补偿也逐渐成为当前研究重点,目前采取的基本策略是分块估计和补偿,或者对相位误差空变建模,再进行估计和补偿。本文重点在于利用先验知识进行参数降维,仅考虑在误差空变性可忽略的情况。但在空变性不能忽略的情况下,已有的空变误差估计和补偿策略也完全可以移植到本算法中。
3 基于先验知识的两维自聚焦算法
基于上述思想,本文提出了一种基于先验相位结构信息的两维自聚焦算法,算法流程如图3所示。在该算法中,首先估计一维方位相位误差,然后利用先验结构信息将一维方位相位误差映射为两维相位误差,最后利用估计的两维相位误差再对散焦图像进行校正。根据上述流程,该算法的参数估计精度主要取决于一维方位相位误差的估计精度,因此算法关键在于如何高精度的估计一维方位相位误差。
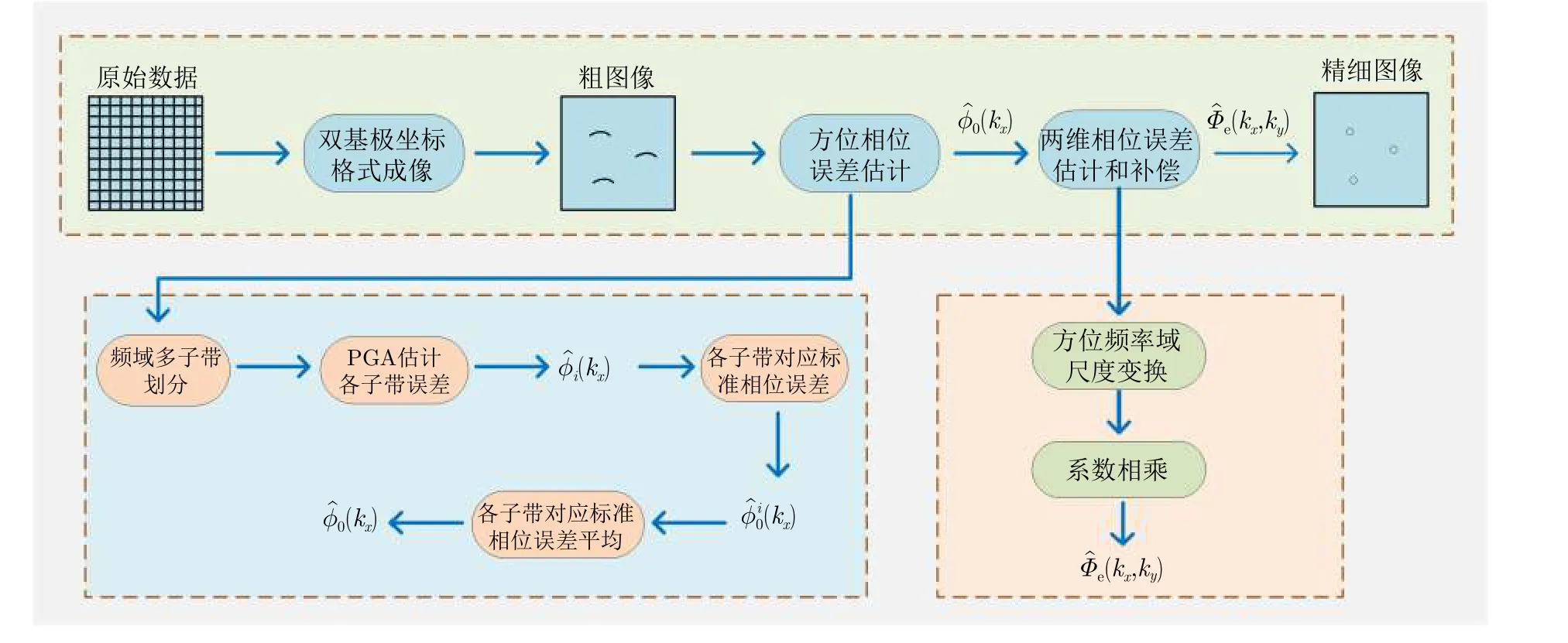
图3 基于先验知识的两维自聚焦算法流程图Fig.3 Flowchart of proposed 2-D autofocus algorithm
在进行方位一维相位误差估计时,如果相位误差不是非常大时,譬如当残留距离徙动不超出一个分辨率单元时,只需要估计方位一维相位误差,此时可以利用整个距离频带数据直接估计方位相位误差。但在误差比较大时,残留距离徙动效应不能忽略。由于目标点存在残留距离徙动,如果直接利用整个距离频带数据则无法在单个距离门内完整提取方位相位误差。在这种条件下,在估计前我们可以通过在距离频域截取子带数据的方法来实现距离向分辨率的降低,从而减小残留距离徙动对方位相位误差估计的影响。已有的方法只是截取了中心频率附近一个子带数据来估计方位相位误差,因此没有完全利用数据。为了进一步改进参数估计精度,我们可以将整个数据在距离向分成若干个子带,每个子带分别进行方位相位误差的估计,最后再对各子带估计结构进行平均来改善估计性能。
子带数目的划分需要考虑如下两个因素:一方面,子带越小,子带数量就越多,相当于估计方位相位误差时的样本就越多,因此越能改善在低信噪比条件下的方位相位误差估计精度。此外,子带越小,分辨率单元就越粗,此时残留距离徙动对方位相位误差估计的影响就越小。但另一方面,子带越小,距离分辨率越差,子带数据里可供利用的强点目标也会越少,不利于改善估计精度。因此,在子带的选取时必须要在两者之间折中,我们一般会在满足子带内残留距离徙动效应可忽略的前提下尽量提高子带数据的分辨率。图4为频域子带划分示意图,图5为APE估计方法流程图,将双基PFA得到的图像变换到两维频域,在距离向将其平均划分为n个子带,假设其n个子带的中心距离频率值分别为:kyi,i=1,2,3,···,n。针对每个子带数据,运用传统自聚焦方法PGA可估计得到各子带的相位误差根据式(24),不同子带数据具有不同的方位相位误差,子带数据的方位相位误差可表示为
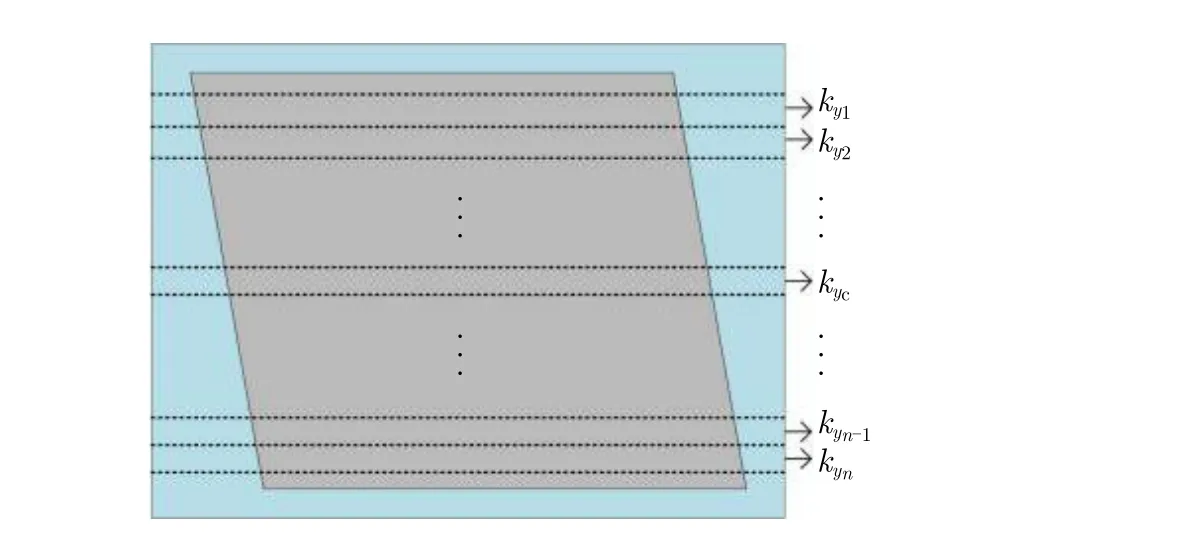
图4 频域子带划分示意图Fig.4 Diagram of sub-band division in frequency spectrum
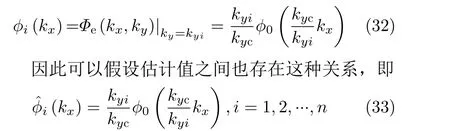
式(33)所示由于各子带数据载频kyi不同,估计得到的一维方位相位误差也存在差别,无法直接平均。根据式(33)可以由子带方位相位误差估计映射得到标准方位相位误差的一个估计,即
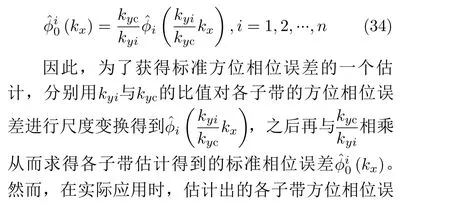
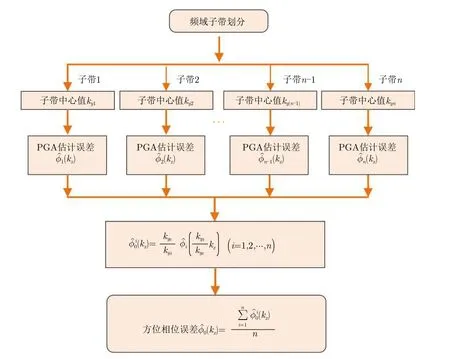
图5 估算APE流程图Fig.5 Flowchart of estimating APE


通过式(36)可知方位相位误差映射得到两维相位误差的过程包括两个步骤,一是方位频率域的尺度变换,另外一个是幅度上的尺度变换。对于方位频域的尺度变换,我们有两种实现方式,其中一种是通过插值实现。另外,为了减少插值误差和改善计算效率,我们也可以通过尺度变换来实现。尺度变换的实现类似于Chirp Scaling算法的尺度变换[15],其实现流程如图6所示,α=kπ,k为信号线性调频斜率,参数α具有任意性但需在滤波函数具有大时间带宽积的条件下,b为尺度因子。这种方位频域的尺度变换是一种与距离频率相关的尺度变换,该尺度变换将映射为。经过变换后的信号仍然与原信号性质相似,只是压缩或拉伸了方位频率轴(方位频率轴的压缩或拉伸取决于kyc/ky>1或kyc/ky<1)。而幅度上的尺度变换是直接将信号乘以一个常数实现。最后,将散焦图像变换回两维空间频率域,利用估计得到的两维相位误差对数据进行补偿。补偿完成后,再变换回图像域后即可得到目标的重聚焦图像。
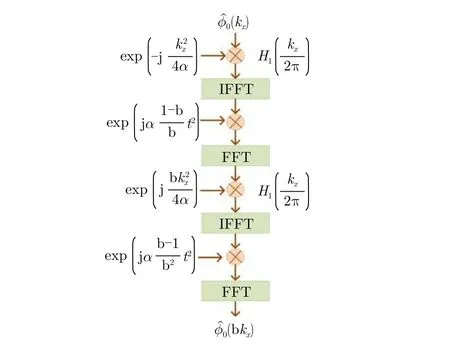
图6 尺度变换流程图Fig.6 Flowchart of scale transformation
4 实验验证
由于缺少双基SAR实测数据,本文只能通过仿真数据处理来验证算法的有效性。仿真分为点目标仿真和面目标仿真两种情况。仿真的雷达系统主要参数如表1所示。雷达成像几何关系如图7所示,发射机速度为200 m/s,接收机速度为100 m/s,雷达名义轨迹为线性航迹,实际航迹在名义轨迹基础上加入了三维扰动。
4.1 点目标仿真数据处理
在成像区域假设有3个点目标分别为(0,0),(20,0)和(0,20)。利用名义线性轨迹对回波数据进行了双基PFA算法处理,成像结果如图8所示。其中图8(a)可以看出双基PFA成像后点目标呈现明显的两维散焦现象。图8(b)为点目标极坐标格式处理后的距离压缩图像,上方为其放大图,放大图中目标弯曲的轨迹表明成像处理后还存在明显的残留距离徙动,因此必须进行两维相位误差校正。为了体现两维自聚焦处理的必要性,本文首先利用一维自聚焦(PGA)算法进行处理,处理结果如图8(c),图8(d)所示。可以看到,图像聚焦效应有了很大改进,但由于没有考虑残留距离徙动的校正,重聚焦结果仍然存在较大的散焦效应。最后,利用本文提出的两维自聚焦算法对散焦图像进行了重聚焦处理,结果如图8(e)所示。从图8(e)和图8(f)可以看出,本文所提算法不仅消除了APE,还消除了残留RCM和其它距离散焦效应,使点目标得到了很好的聚焦。图9则为图8(e)中3个点目标响应的两维等高线图。可以看到3个目标都得到了理想聚焦。然而,在经过双基SAR PFA成像重采样后频谱自身区域不再是标准矩形,而是类似于平行四边形。这种频谱的变形会导致点目标成像后的图形不再是一个标准十字型,点目标图像在距离向上会有明显的倾斜如图9所示。所以我们无法对点目标直接进行定性和定量评估。但可以通过采用截取频谱的方法将频谱的形状转换为矩形,从而使成像后的点目标成为标准十字型。但是频谱的截取会导致数据信息的部分缺失,使图像降低了分辨率,无法精确反应实际分辨率。图10为图9(a)中点目标处理后距离向和方位向的剖面图。
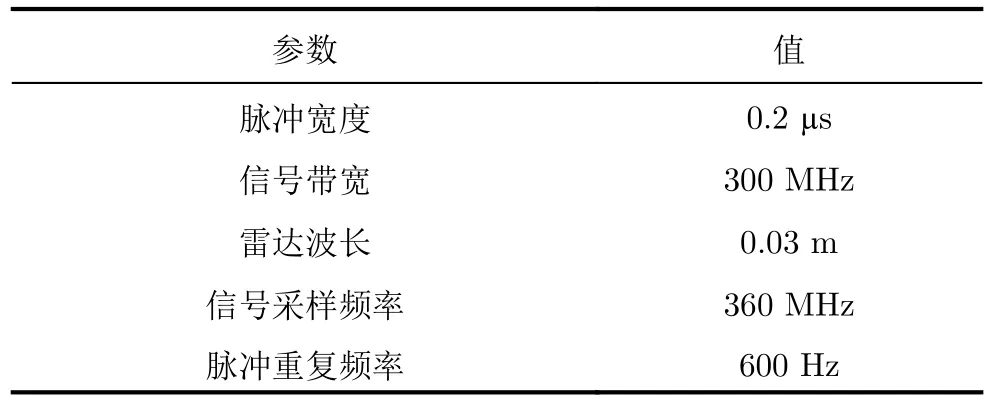
表1 仿真参数Tab.1 Simulation parameters
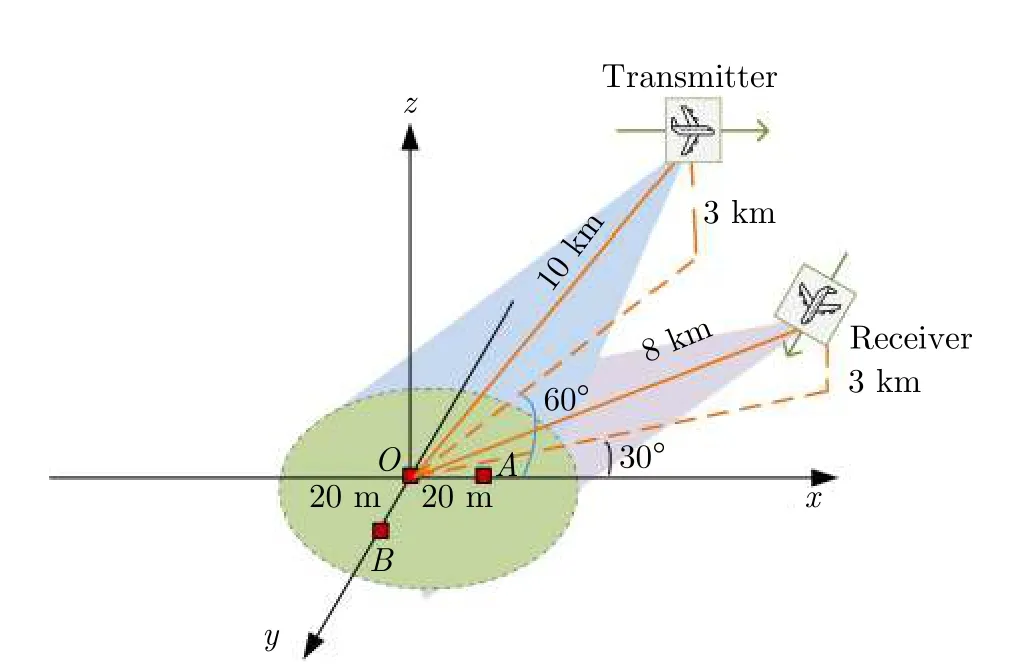
图7 仿真雷达数据采集几何Fig.7 Simulated data collection geometry
4.2 面目标仿真数据处理
本节利用一幅单基SAR复图像作为场景目标散射系数,构造得到双基SAR回波信号,从而进行面目标仿真实验。图11(a)作为散射系数的单基SAR图像。利用PFA算法对模拟得到的数据进行成像处理,成像处理时利用名义雷达航迹,由于实际航迹存在一定的扰动,因此成像结果存在严重的两维散焦,如图11(b)所示。由于在PFA成像过程中,坐标系被旋转了一定的角度,所以所成的像与原图存在着视角的变化。为了进一步看出两维散焦效应,本文同时给出图像的距离压缩图像如图11(f)所示,从图9中可以看到明显的残留距离徙动。同样,为了比较,本文先进行了一维自聚焦处理,成像结果如图11(c)所示。相比于图11(b),经过PGA处理后图像质量虽有所提高,却依旧存在两维散焦,无法清晰地呈现出目标轮廓。且距离压缩图11(g)中依旧存在弯曲即残留RCM和其它距离散焦项。图11(d)是经过本文所提两维自聚焦算法处理后的结果,其图像效果得到了明显的改善且距离压缩图11(h)中已无残留距离徙动,很好的消除了两维相位误差。图11(e)为图11(d)中强点的放大图,可以看出此点呈现良好的聚焦效果。
5 结论
本文以双基PFA算法为例,分析了极坐标变换对两维相位误差的影响,推导出了双基PFA图像空间频率域残留两维相位误差的内部结构。通过引入相位误差结构的先验知识,提出了基于一维相位误差估计的双基两维自聚焦方法。与其他双基自聚焦算法相比,在计算效率和精确度方面有着明显的优势,该方法能够在残留误差很大的情况下,依旧能对两维相位误差进行快速,准确的估计。
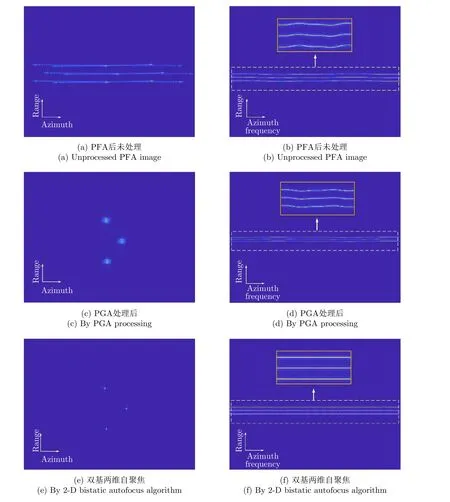
图8 点目标仿真数据处理结果Fig.8 Simulation results of point target
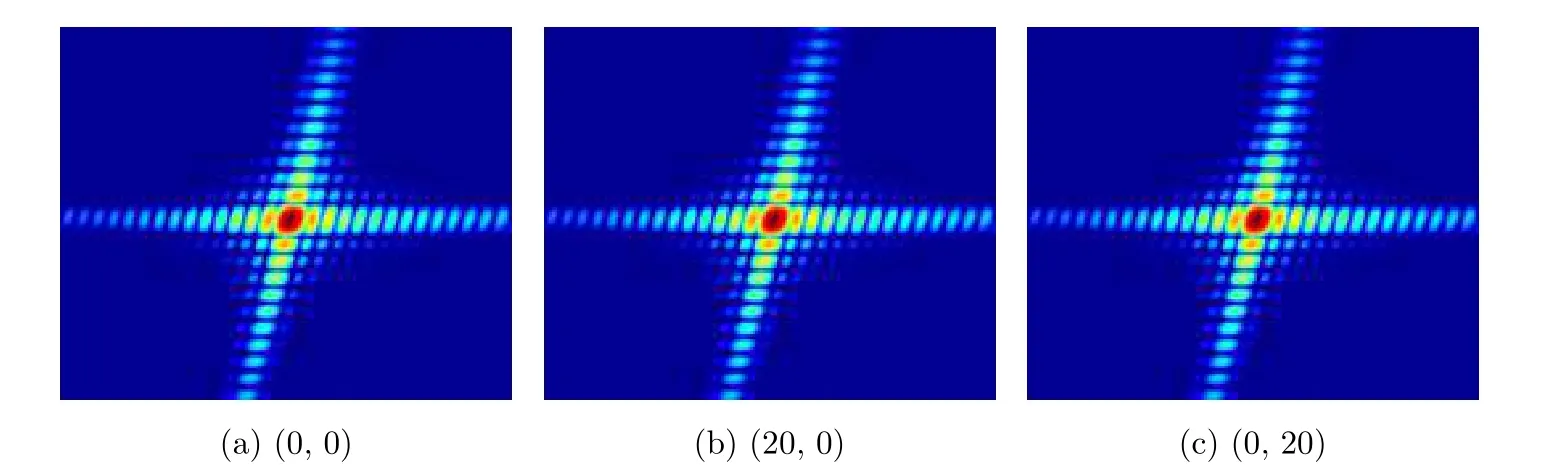
图9 双基两维自聚焦后点目标放大图Fig.9 Enlarged view of three point targets after 2-D bistatic autofocus algorithm
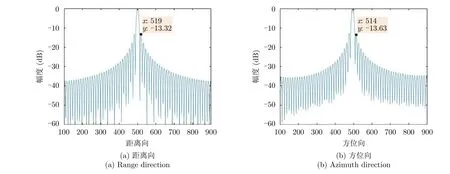
图10 点目标剖面图Fig.10 Profile of point target
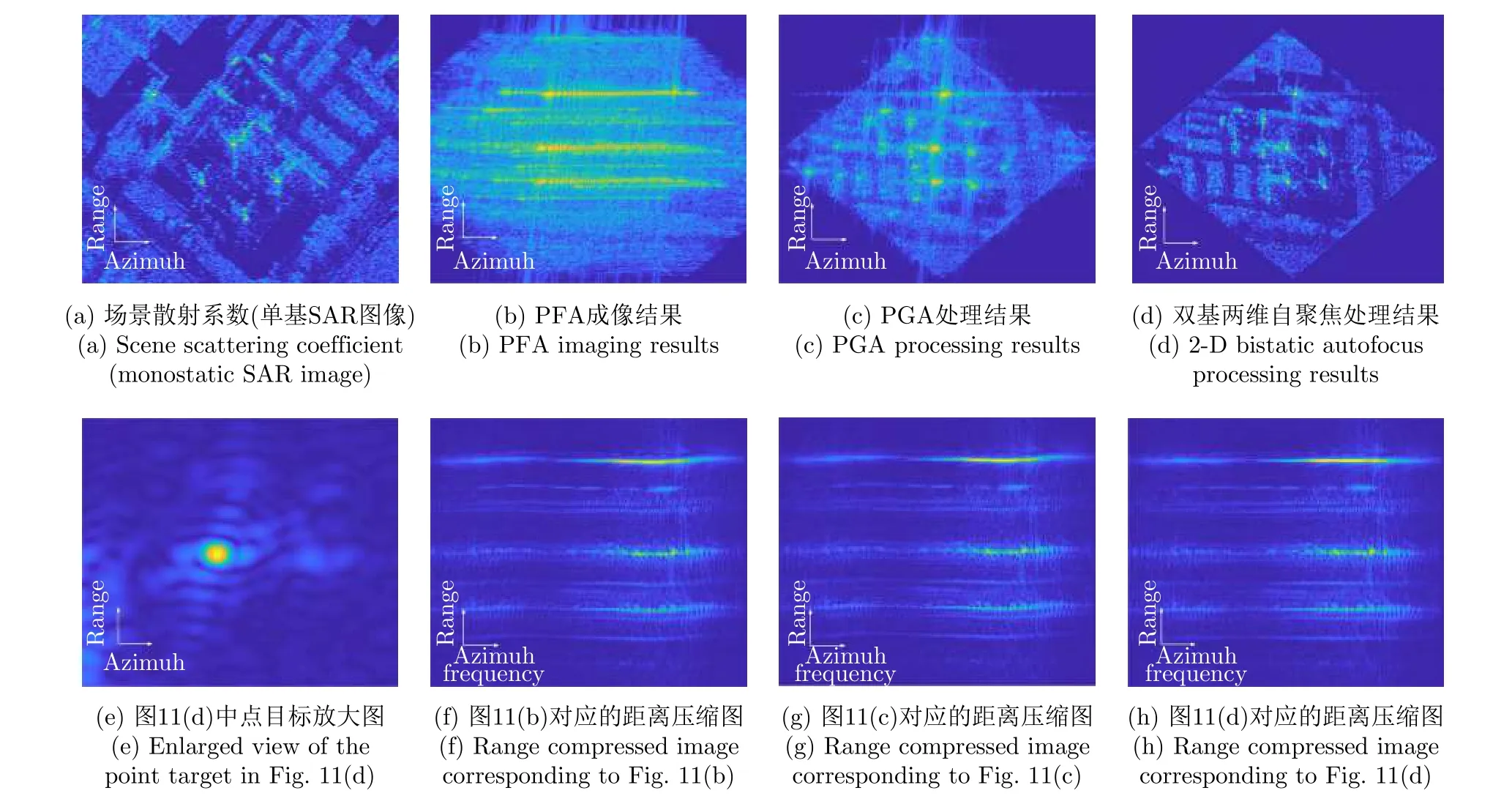
图11 面目标仿真数据处理结果Fig.11 Simulation results of area target
猜你喜欢
空间电子技术(2021年4期)2021-11-10 07:06:04
幼儿园(2021年12期)2021-11-06 05:10:20
电子制作(2019年22期)2020-01-14 03:16:24
光学仪器(2018年3期)2018-10-10 09:18:34
科技创新与应用(2017年11期)2017-04-27 16:35:27
海军航空大学学报(2016年6期)2016-12-27 03:21:47
系统工程与电子技术(2016年2期)2016-04-16 05:16:50
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00