
小麦宽幅机械化播种自动驾驶技术试验对比分析研究
2020-12-30 06:23褚春年
农业与技术 2020年24期
褚春年
(西安市农机监理与推广总站,陕西 西安 710000)
随着社会生产力的不断发展,自动化技术在各个领域中得到了广泛应用。近年来,西安市引进了“慧农RinoSteer”北斗导航农机自动驾驶系统,主要应用于小麦、玉米的播种作业生产上,保障了农业生产控制的精确性,减少驾驶操作人员劳动强度,避免在作业过程中因为操作不当所引发的重播和漏播,降低经济成本,提高经济效益。本文对小麦宽幅机械化播种自动驾驶技术在西安市的试验情况进行对比分析研究,提出了适合推广的最佳技术模式,保障小麦的丰产丰收,取得更好的经济效益。
1 试验机具和示范田的选择
1.1 试验机具的选择
选择北京合众思壮科技有限公司生产的“慧农RinoSteer”北斗导航农机自动驾驶系统,安装在久保田农业机械(苏州)有限公司生产的M954KQ拖拉机上,配套西安亚奥农机有限公司生产的2BFG-9(220)型小麦宽幅播种机进行小麦机械化播种作业,并与同等条件下未安装自动驾驶系统的小麦宽幅播种机进行小麦机械化播种作业进行对比试验分析研究。
1.2 试验装备系统
试验使用的拖拉机安装的是“慧农RinoSteer”北斗导航农机自动驾驶系统,属液压式自动驾驶系统,在试验田地头放置北斗GNSS便携式基站,利用高精度的北斗卫星定位导航信息,由控制器对农机的液压系统进行控制,配合角度传感器使用,使拖拉机悬挂播种机按照设定的直线路线进行自动驾驶播种作业生产。“慧农RinoSteer”北斗导航农机自动驾驶系统原理见图1。

图1 “慧农RinoSteer”北斗导航农机自动驾驶系统原理示意图
1.3 试验田的选择
为了统一管理,在相邻地块建立对比试验田,开展小麦宽幅机械化播种自动驾驶技术与小麦宽幅机械化播种技术模式的对比试验,每种技术模式试验区0.67hm2。
2 对比试验方法和要求
2.1 建立试验田
在具有同等水肥条件且有相同土壤类型的同一区域内建立核心技术试验田和对照田。
2.2 试验条件
试验田和对照田全部采用统一种子、统一化肥、统一播种量、统一施肥量和统一的田间管理,使农机与农艺的技术要求逐步对接、相互融合。
2.3 不同技术集成模式试验设计
模式1:自动驾驶技术加小麦宽幅播种;模式2:小麦宽幅播种。
在试验田,小麦播种采取的技术模式是自动驾驶技术加小麦宽幅播种(模式1);在对照田,小麦播种采取的技术模式是小麦宽幅播种(模式2)。2种小麦播种技术模式的播种试验面积、播前整地方式、播种品种、单位播种量、单位施肥量均相同,不同的是,模式1安装了自动驾驶系统,模式2没有自动驾驶系统,2种模式的播种作业试验如表1、2所示。从表2可以看出,模式1播种方式的播种作业直线精度和衔接行精度偏差在0.025m之内,而模式2的播种作业直线精度和衔接行精度偏差较大,有漏播、重播的情况发生。

表1 小麦宽幅机械化播种自动驾驶技术对比试验播种情况

表2 小麦宽幅机械化播种自动驾驶技术对比试验直线精度情况
3 小麦生育期管理
3.1 苗期管理
在小麦出苗后,采用梅花五点法,每个点选取0.25m2,对试验田和对照田进行抽样统计测算,检查出苗情况,测定667m2基本苗数(详见表3)。从表3可以看出,模式1比模式2出苗率高、显行后直线度好。

表3 小麦宽幅机械化播种自动驾驶技术对比试验出苗情况
查看小麦冬前、春季返青分蘖情况和小麦根系生长发育情况,并记录(详见表4)。从表4可看出,模式2群体单位苗数和平均次生根少,而模式1群体单位苗数和平均次生根多,长势优于模式2。
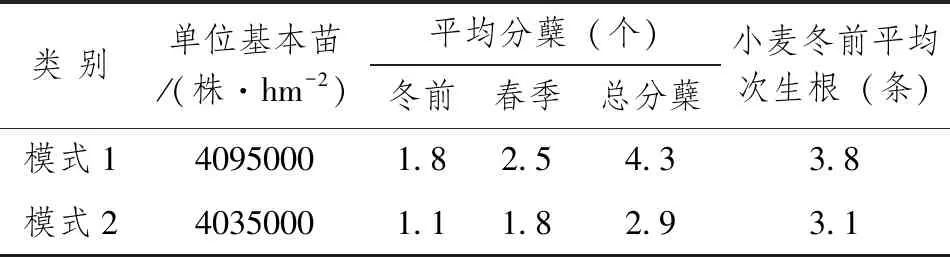
表4 小麦宽幅机械化播种自动驾驶技术对比试验出苗情况
3.2 生育期管理
根据小麦各个生长时期的特点以及示范田实际情况,合理进行追肥、灌溉,并适时进行化学除草和病虫害预防(如表5)。追肥分别在入冬前、开春返青前进行,灌溉视旱情需要适时进行。
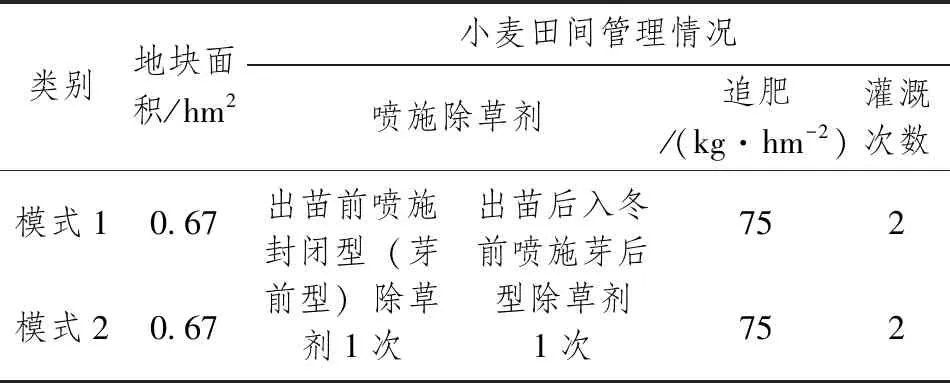
表5 小麦宽幅机械化播种自动驾驶技术对比试验田间管理情况表
4 测产
小麦蜡熟末期收获之前,采用梅花五点法(每点取1平方米,数据折算成每公顷计)测定试验田和对照田小麦产量构成因子,进行对比分析,计算单位产量(每公顷产量)。具体测定情况详见表6。从表6可看出,模式1单位产量7089.12kg,模式2单位产量6752.65kg,模式1比模式2单位产量高出336.47kg。

表6 小麦宽幅机械化播种自动驾驶技术对比试验测产情况表
5 结论
无论是从出苗率、分蘖情况和理论产量比较,模式1比模式2都具有一定优势。加之,由于模式1避免了重播和漏播的发生,运用自动驾驶新技术可以使驾驶员在进入作业生产时,拖拉机只需按照设定路线作业,解放了驾驶操作人员的手脚,降低了劳动强度,而且还可以实现24h连续作业生产,在三夏三秋农忙重要季节,能够达到抢收抢种、不误农时,实现颗粒归仓和把粮食种在高产期,作业生产效率高,具有明显的社会效益和经济效益。因此,模式1即小麦宽幅机械化播种自动驾驶技术应予大面积推广。
猜你喜欢
军事文摘(2023年20期)2023-10-31
小哥白尼(神奇星球)(2022年3期)2022-06-06
航天返回与遥感(2022年1期)2022-03-09
当代陕西(2019年18期)2019-10-17
中国医院院长(2017年9期)2017-06-15
上海公路(2017年2期)2017-03-12
知识经济·中国直销(2016年7期)2016-11-07
太空探索(2016年3期)2016-07-12
公民与法治(2016年6期)2016-05-17
橡胶工业(2015年4期)2015-07-29
