新工科背景下的双系统机器视觉综合教学平台研制
2020-12-29 12:00马守明严惠李志远张国成
中国教育技术装备 2020年10期
马守明 严惠 李志远 张国成

摘 要 分析新工科与智能制造背景下自动化专业群对人才培养要求;设计双系统机器视觉综合教学平台的机械结构,包括视觉部分、摆动机械手装置、传动机械手装置;根据工艺与硬件要求,完成三菱与西门子双系统控制电路设计;提炼系统知识体系,给出系统可开设的教学项目。
关键词 新工科;自动化专业;机器视觉;双系统;教学平台
中图分类号:G712 文献标识码:B
文章编号:1671-489X(2020)10-0025-03
Abstract The requirements of the automation specialty group for per-sonnel training under the background of new engineering and intelli-gent manufacturing is analyzed; the mechanical structure of the dual system machine vision integrated teaching platform is designed, in-cluding the vision part, swing manipulator device and drive manipu-lator device; the control circuit design of Mitsubishi and Siemens dual system according to the requirements of technology and hard-ware is completed; the system knowledge is extracted and the system
teaching items that can be set up are given.
Key words new engineering; automation specialty; machine vision; dual system; teaching platform
1 引言
智能制造是上下游全覆盖、全流程定制化的高科技生产方式。2017年召开的世界智能制造合作高峰论坛上,工信部发布了《智能制造发展规划(2016—2020年)》,提出十大重点任务,智能制造人才培养不能单单局限于纯粹的操作技能培训[1]。随着生产方式的变化,智能制造行业对毕业生的要求已经打破了传统的知识架构,新的知识结构体系与智能制造设备开发岗位对人才能力的需求越来越综合[2]。
机器视觉的出现是为了取代烦琐的劳动力。基于机器视觉的工业自动化集成设备能够进行重复性工作,且适用于危险工作环境以及人工视觉难以达到精度要求的场合。利用机器视觉的自动识别功能,大大提高了工业流水线的生产效率,且保证了精度[3]。
在新工科背景下,突出视觉检测方向在测控技术与仪器专业人才培养中的教学地位,是各院校应对新的技术革命和新兴产业发展,升级改造传统专业课程体系的建设举措[4]。各高校在自动化专业群开设了众多融入机器视觉的课程,针对人才培养需求,引入了众多机器视觉教学平台,如基于机器视觉的药品生产线瓶盖缝隙自动检测设计[5-6]、基于机器视觉和步进电机快速控制系统的气冰球机器人实验教学系统[7]、基于双目立体视觉原理的包含双目摄像机、标定材料、数据采集软件的实验平台[8]等。为了满足新工科建设对自动化专业人才培养的要求,师生创新创业团队自主研发机器视觉综合实验教学平台,服务于专业综合实训课程教学,培养学生的工程实践、设计、创新能力。
2 视觉平台机械结构
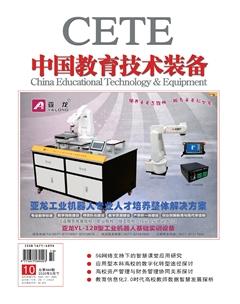
平台主要是抓取流水线上小车输送的圆形冲孔工件,抓取后搬运传送至视觉摄像头下方检测,不合格的则放入废料槽,合格则送回小车上进入下一个工作站。平台机械结构如图1所示。视觉部分主要是铝型材支架固定于台面合适位置,无须赘述,重点说明传送机构和摆动抓取结构。
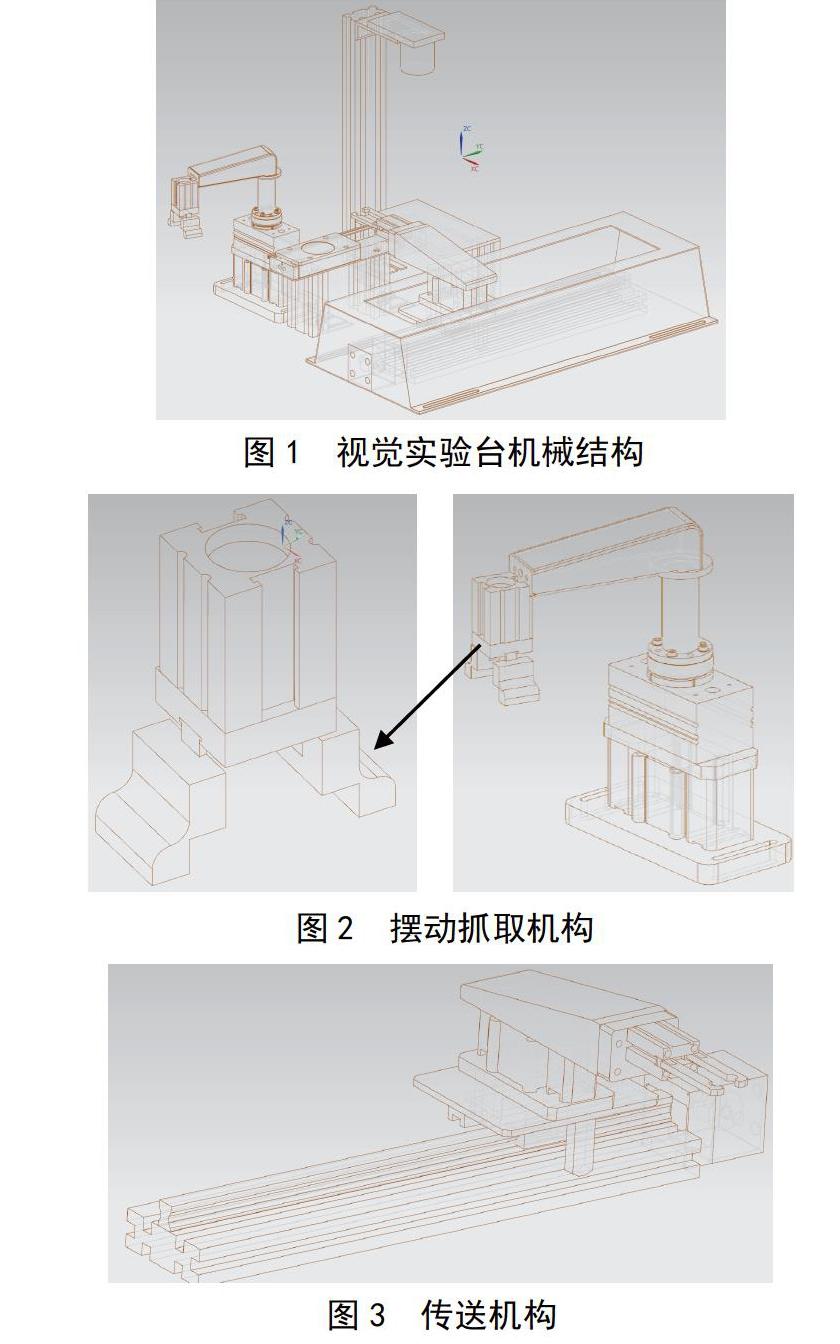
摆动抓取机构 物料抓取到滑台的抓取机构中用到了摆动气缸,摆动抓取机构的机械手初始位置通过调节摆动气缸角度进行安装。机械手的手爪抓取行程由工件的直径与厚度决定,工件直径为6 cm,厚度为1.5 cm,机械手手爪的范围为5.8~7.5 cm之间,见图2。
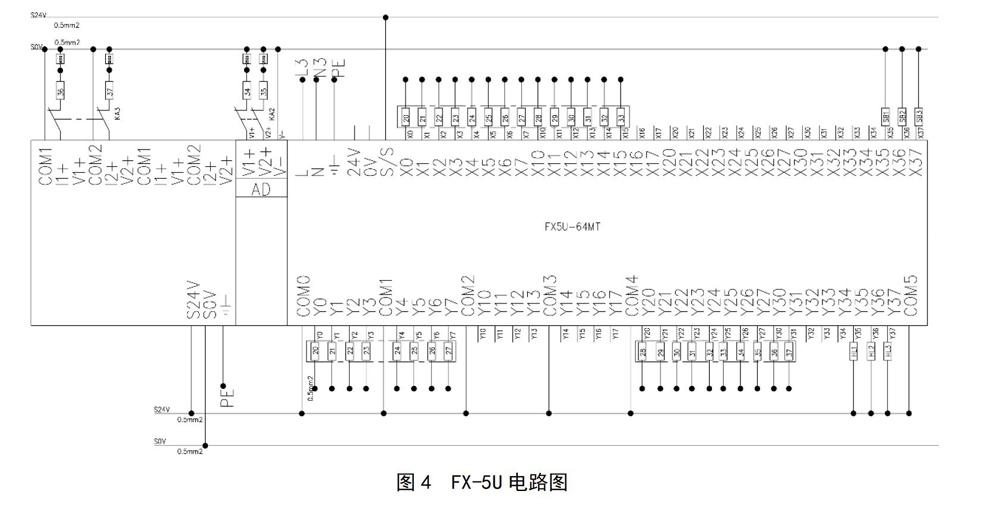
传送抓取结构 在视觉系统中的运送机构中由于对工件的检测是对一个范围型特征的检测,因此对运送机构的精度要求不是很高。如图3所示,采用步进电机控制抓取机械手在导轨上的滑行,滑行行程为40 cm,设置前后限位与极限位行程开关。
3 控制系统
实验台工艺流程规划 在视觉系统的应用要求中,视觉系统的机械结构主要由视觉检测机构、运送机构和抓取机构三部分组成,工艺流程为:小车检车传感器检测到传送带上有小车到来,小车定位气缸工作拦住小车,视觉实验台摆动气缸右摆,升降气缸下降,摆动气缸机械手抓取小车上工件后,擺动气缸抬起,左摆,升降气缸下降,摆动气缸机械手松开将工件置于滑台上,滑台右行,传送机构机械手抓取滑台上工件,在步进电机驱动下前往视觉检测区,驱动视觉检测,若与设定模板不同,认定为废品,将工件送往废料槽后,实验台恢复初态;若通过检测,则将工件送回小车后,实验台恢复初态。
控制电路 双系统机器视觉综合教学平台采用的是FX-5U和S7-1200双系统,两个控制系统均可实现控制。控制电路如图4、图5所示。
4 平台教学项目设计
依托平台构建知识体系 双系统机器视觉实训平台所涵盖的知识点如表1所示,对自动化专业人才培养方案中大部分的专业课与专业基础课进行了有效融合。
依托平台开设的教学项目 基于上述知识体系,自动化专业群学生各专业学生在前序课程尤其是PLC课程选择其中一个系统学习;进入专业综合环节学习时,可选择其中一种系统进行主学习,另一系统可用于拓展训练。可开设的教学项目如表2所示。
5 结语
本文所设计的视觉实训台为师生创业团队共同研发的柔性环形流水线中的工作站,平台极具开放性与柔性,改变了传统的插孔式平台,使学生在训练过程能知其然更知其所以然,提升专业能力与方法能力。
参考文献
[1]宜科(天津)电子有限公司.智能化人才培养 柔性化教仪先行[J].智慧工厂,2018(11):31.
[2]杨氟,杨康民.智能制造背景下大学时期自动化智能化设备开发的培养探索[J].智能建筑与智慧城市,2019(12):94-96.
[3]陈涛.机器视觉如何应对与工业自动化系统集成应用的挑战[J].内燃机与配件,2020(1):194-195.
[4]张凯兵,张缓缓,李珣,等.新工科背景下测控技术与仪器专业视觉检测方向课程体系构建[J].科教导刊,2019(3):17-18,63.
[5]赵巨峰,高秀敏,崔光茫.结合生产线的视觉检测实验系统设计[J].实验室研究与探索,2016(4):59-62.
[6]张凯兵,景军锋,郭亚青,等.基于“项目驱动法”的“工业机器视觉测量与控制”综合实践教学模式研究[J].科教导刊,2019(1):138-140,162.
[7]李寿杰,宋华军,兴雷,等.基于机器视觉的气冰球机器人实验教学系统设计[J].实验技术与管理,2020(1):200-204.
[8]刘艳,曹光静,朱金秀,等.双目视觉实验平台及教学项目设计[J].实验技术与管理,2020(1):44-47,51.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
科学与财富(2016年18期)2016-12-22
新教育时代·教师版(2016年31期)2016-12-07
科教导刊(2016年26期)2016-11-15
科技视界(2016年18期)2016-11-03
科技视界(2016年15期)2016-06-30
电脑爱好者(2015年6期)2015-04-03
电脑爱好者(2015年6期)2015-04-03
测绘科学与工程(2014年1期)2014-02-27