
无人艇自主式枪站系统的构建与作战应用研究*
2020-12-26 02:57黄钦龙童继进
火力与指挥控制 2020年11期
黄钦龙,刘 忠,童继进
(海军工程大学,武汉 430000)
0 引言
水面无人艇即无人驾驶操作的水面舰艇,是将传统船舶技术与无人智能技术相结合的新产物。近些年来发展迅速,具有体积小,机动性强,隐身性能好,成本较低,无人员伤亡等优点,能够搭配不同载荷满足多种作战态势下的任务需求。现阶段水面无人艇在军事训练、战场警戒、猎雷、反潜、反导、电子战支援、后勤保障等方面发挥着重要的作用,已逐步演变为军事领域中的一支重要力量[1-5]。
然而,国内现有水面无人艇大多不具备有效的自卫手段,在执行军事任务时对于敌方的抵近侦察,破坏甚至捕获行为无法采取有效的反制措施,战场生存性面临极大挑战。为提高水面无人艇的作战生存能力,当前急需发展与之对应的自卫型武器装备系统,并对其战场作战应用进行研究,以适应战场新威胁,为未来无人海战提供支撑[6-11]。
1 水面无人艇发展现状
1.1 国外水面无人艇现状
随着对水面无人艇平台研究的不断深入和技术瓶颈的逐步突破,各个国家都增大其研究投入,力图打造最先进的无人艇水面力量,其中美国和以色列成果最丰硕,已有多款型号装备部队。
美国先后研制了“海上猫头鹰”“斯巴达侦察兵”“X-2 号”“幽灵卫士”“水虎鱼”“海狐”等等。其中最为典型的是“斯巴达侦察兵”水面无人艇(如图1 所示)。其采用美军通用的11 m 刚性平底充气艇为基座,最大航速超过30 kn,续航时间大于8 h,具备全天候作战能力。该艇标准化的模块设计可以搭载多种任务组件,执行不同使命任务,如反舰作战模块、反潜作战模块、反水雷模块、情报侦查模块等[12]。

图1 “斯巴达侦察兵”
除了美国之外,世界其他国家也积极致力于水面无人艇的发展和研究,并取得了一些成果[13-14]。
1.2 国内水面无人艇现状
目前我国水面无人艇研究还处于起步阶段,多方面关键技术还不太成熟,与美国、以色列等USV发展强国有一定差距,但近些年来发展迅速,也取得了较大进步。
比较典型的有新光集团研制的“天象一号”气象探测无人艇,上海大学牵头的“精海”系列测量艇,2016 年亚洲防务展会上保利集团和哈工程联合推出的水面监视SUV,广州珠海第十二届航空博览会上的“瞭望者II”导弹无人艇,以及海军工程大学最新研制的“Sturgeon”多功能无人艇等[15]。
2 无人艇自主式机枪站系统的构建
2.1 自主式机枪站的使命分析
随着无人艇关键技术的不断成熟,以及在战场情报侦察、扫雷、反潜等军事任务的应用,世界各国对无人艇作战的反制措施也开始了研究,如电磁干扰、信号源迷惑、快艇拦截撞击、多艇围捕等等。为提高无人艇战场生存能力,对敌方武装快艇或近距离可疑目标形成基本的威慑,装备自卫型武器系统是必然选择[16-17]。
中大口径机枪等轻武器由于威力适中、适装性好,一直以来是很多国家海警、缉私、海防等执法船艇的主要武器装备和其他水面舰艇的近程辅助武器。参考美军《海军无人水面艇主计划》,从成本节约性、模块化和通用性多角度考虑,将现有成熟机枪站改装于无人艇是一种简单、经济、有效的选择。
目前,遥控式机枪站已经具备从目标搜索、瞄准到射击的全程电控驱动能力,实现了人与武器的有限分离,避免了将身体探出战车或暴露舰船甲板之上而造成的伤亡,可满足载人战车和有人舰艇的作战使用。但由于无人艇作战的特殊性,传统遥控机枪站尚不能满足无人艇的作战需求,主要原因分析如下:首先,现有无人艇吨位较小,船艇的机动或者海浪产生的晃动,严重影响了操作人员对战场观察、目标瞄准和命中概率;其次,现有遥控机枪站大多是近距离操作,可以满足载人战车、有人舰船的实时作战需求,然而无人艇涉及区域作战,战场信息延时会对作战效能大打折扣;此外,现有遥控式机枪站无法满足无人艇全天候火力威慑的作战特点。
因此,面对无人艇作战任务多样化,兵力规模集群化的新特点,传统的人工遥控方式的机枪站不能满足无人艇作战需要,而基于自动控制、智能决策等技术的自主式机枪站可以有效解决上述问题,实现无人艇机枪站的自主作战,对进一步提高无人艇自动化,智能化水平,完善无人艇作战体系,充分发挥无人艇作战效能,具有重要军事意义。
2.2 机枪站的装备选型分析
根据上文,现阶段在研和服役的无人艇大多为小型高速艇,长度一般在10 m 左右,排水量不超过100 t,载荷有限,适合装载中大口径机枪站。现对国内外已经成熟的遥控式机枪站进行特性分析,找到性能合适、易于改装的自主式机枪站原型。

表1 典型遥控机枪站数据
目前,国外经典的中大口径舰载遥控机枪站包括土耳其Aselsan 公司的“稳定机枪平台”(STAMP)、以色列拉斐尔公司研制的“小台风”(Mini-Typhoon)、挪威康斯堡防务宇航公司的“海上保护者”(Sea Protector)、意大利奥托·梅莱拉公司制造的12.7 ms“打击幕”(Hitrole NT)和南非Reutech公司研制的“海上漫游者(Sea Rogue)[18-20]。具体数据如表1 所示,基于保密的原则,现不讨论国内机枪站。
口径方面,大多数舰载机枪站口径为7.62 mm或12.7 mm,现选取12.7 mm 作为基本需求以满足警戒射击所需火力;载重方面,为满足无人艇多模块化设计,为其他装备提供充足装载空间,载重取最小;观瞄系统方面,大多采用CCD 彩色摄像机和红外成像装置,足以满足现有光电识别系统以及全天候作战需求。方向回旋和高低俯仰旋回角方面,考虑到海上风浪环境影响以及无人艇较小吨位,恶劣环境下舰艇纵横摇可能较大,对高低俯仰角度范围要求较高,应选取尽可能大。综上,在现有经典舰载机枪中选择海上保护者(Sea Protector)作为适装原型。
2.3 机枪站系统的构建
无人艇自主式机枪站的主要作战任务是反恐警戒,打击敌方可疑小目标。方案应根据机枪站系统的具体使命任务,立足于现有无人艇技术水平和火控理论框架,对系统进行合理布局和优化。火力单元中的武器采用上一节中的制式装备,并进行适应性改装;传感器探测设备根据作战环境需求,进行模块化和系列化设计;控制系统则根据现有舰载控制系统成熟技术进行小型化和低成本化重建。综合考虑,其体系框架具体由以下模块组成:1)目标探测与识别系统。包含雷达、光电等设备,实现对海面、低空目标的警戒侦查与识别;2)武控系统。用于完成无人艇机枪站自主作战指挥决策及射击诸元解算;3)导航系统。用于提供无人艇位置、姿态及时统信息;4)航行控制系统。用于实现无人艇占位机动;5)通信系统。用于实现无人艇编队间及与有人舰艇间视频、数据交互;6)指挥所战术指挥台。无人艇的远程遥控与监视;7)机枪站。反恐警戒与火力打击任务。
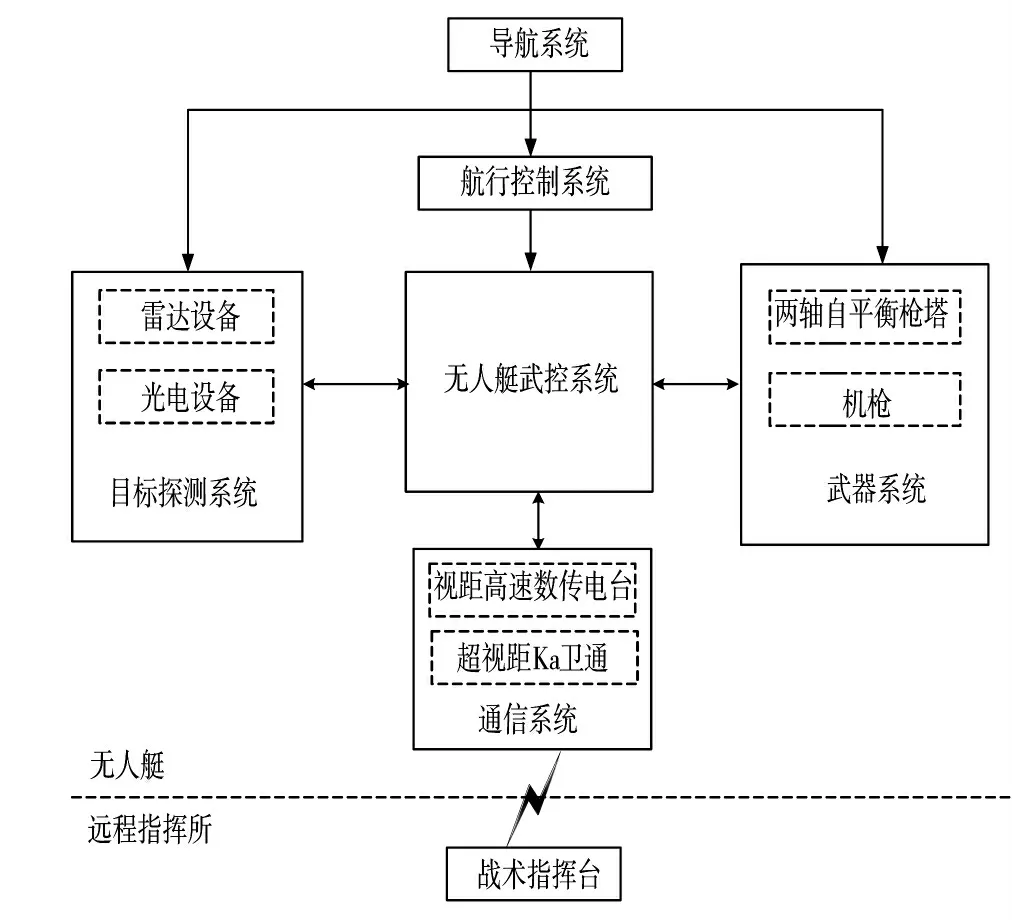
图2 机枪站系统框架
3 作战应用研究
根据已构建的无人艇自主式机枪站系统,应制定符合其使命任务和性能特点的作战模式,对不同作战场景和兵力规模采取相应作战策略,以充分发挥无人艇平台机动和机枪站火力打击的结合优势。现根据无人艇自主式机枪站平台的作战应用场景,构建以下3 个应用态势:无人艇遂行任务时的经典自卫模式、近岸港口巡逻防御模式和近海伴随护卫模式[21-27]。
3.1 遂行任务时的经典自卫模式
无人艇在遂行多模块任务时(猎雷、反潜或电子战等等),可能会遭到敌方有限兵力的多方面干扰,甚至抵近破坏以及捕获。这要求无人艇在顺利执行当前使命任务的同时,具有一定的威胁自卫能力,能利用自主式机枪站对抵近的可疑目标进行威胁警戒或毁伤射击。为保证无人艇顺利完成主要模块任务,不考虑战位机动,以单艇为作战单元,对进入该无人艇威胁判定区的可疑目标进行多层次的威胁判断和火力警戒射击。具体包括以下内容。
3.1.1 目标识别与威胁判断
无人艇对战场环境、作战态势、目标特征的自主感知是实现无人艇机枪站自主作战的先决条件。通过艇上雷达与光电等传感器,对进入威胁判定区的目标辐射源特征、光电图像特征、敌我识别特征、运动特征进行综合识别,获得目标最大概率身份估计;再根据敌我战场相对态势信息,目标运动信息进行威胁判断,得到无人艇周围目标威胁排序表。考虑到单艇火力打击情况下,默认打击威胁排序最大的目标。
3.1.2 目标定位与跟踪
对于待打击目标,考虑到海上风浪环境和无人艇自身吨位条件,雷达和光电等传感器在观测过程中会产生信号丢失或跟踪失真等问题。为保障机枪站能连续稳定对目标瞄准,必须进行目标定位与跟踪过程,即对目标信号进行算法滤波。
3.1.3 射击方案:警示射击/威胁射击/火力毁伤
对于进入警戒区域的威胁目标,应采取由浅至深的威慑方式:即在目标进入最外围警戒区域时采取对空警示射击的方案,以威慑驱逐误入警戒区域的渔船或敌方单位;对于无视警示射击,并进入第二层警戒区域的单位,采取前置点威胁射击方案,即对目标前进方向数米进行火力射击,以达到更明显的威胁效果;当目标执意进入最内层警戒区域时,采取精确打击以毁伤目标。具体任务流程如图3 所示。
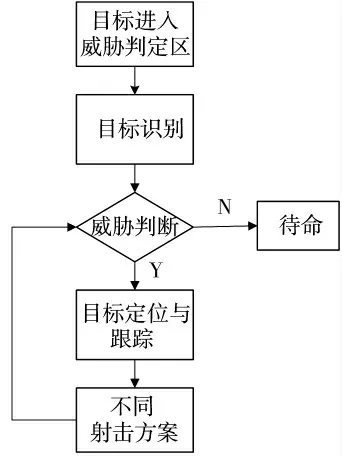
图3 经典自卫模式流程图
3.2 近岸港口巡逻防御模式
在该模式下,多无人艇以周期性巡逻的方式联合监控近岸港口区域的安全态势,通过多艇信息组网与数据融合技术,充分利用无人艇分布式巡逻的优势,为近岸港口区域安全监控提供更加全面的态势感知能力。同时,装载的自主式机枪站也可以提供实时的火力支援,第一时间到达指定战位处理突发状况。除了与经典自卫模式相同之外,还包括以下内容:
3.2.1 数据融合
数据融合是巡逻防御模式下重要的战场信息处理流程,通过利用无人艇的分布式配置,可以在高容错条件下收集到多平台、多传感器提供的更加广阔与丰富的战场态势信息,联合感知港口威胁目标,做好提前预警。
3.2.2 航路规划
该航路规划问题是指根据防御巡逻任务的区域边界和障碍等条件,设计出符合无人艇侦查能力、航行能力和火力打击能力,经济性和实用性协调统一的具体航行路线。常用的方法有可视图法、自由空间法、人工势场法和其他现代智能算法。
3.2.3 战位机动
射击战位是指火力打击时我无人艇相对打击目标的位置点,主要包括舷角和水平距离。从当前接受任务区域到指定火力打击点的战位机动,是保障我方无人艇安全和对目标进行有效火力打击的重要环节。具体决定于待打目标的威胁度、目标运动趋势、我方射击方案、地形障碍特点以及水文环境等。对于该多目标决策问题,常用的方法有分层序列法、多属性效用法、层次分析法和TOPSIS法等。
具体任务流程如下页图4 所示。

图4 港口巡逻模式流程图
3.3 近海伴随护卫模式
该作战模式下,无人艇机枪站系统能够有效解决骚扰大型水面舰艇的近海域水面小目标,如敌武装快艇、蛙人等。对于此类小威胁目标,大型水面舰艇的导弹和舰炮火力与之并不匹配,无论是成本还是精确打击效果都捉襟见肘,舰载机枪站射程有限也难以进行有效火力威胁。此情形下,无人艇机枪站系统可以充分发挥其机动性强、成本低以及火力适中的优点。相比其他模式,有以下不同:
3.3.1 任务规划
在无人艇出发前,根据当前任务要求完成相关模块的调试工作,提前部署待打威胁目标的属性信息、当前区域的地理水文信息、无人艇航路规划等,为后续自主作战环节提供充足信息保障。
3.3.2 平台的释放和回收
完成任务规划后,由母艇系统控制台组织布放活动,将无人艇释放到水面,开始执行任务;任务结束后,即威胁消除时,无人艇返回母舰旁,由母舰组织回收保养。
具体任务流程如图5 所示。
4 结论
本文将无人艇与自主式机枪站相结合进行了探讨,梳理了其发展现状,并在系统构建的基础上对其作战应用进行了研究。通过对无人艇自主式机枪站系统不同作战模式的分析,给提高无人艇自身战场生存能力和协同防御能力提供了有效的理论支撑,具有一定的军事价值。

图5 伴随护卫模式流程图
猜你喜欢
军事文摘(2022年17期)2022-09-24
小学生学习指导(小军迷联盟)(2021年10期)2021-12-06
政工学刊(2021年8期)2021-07-31
政工学刊(2021年4期)2021-04-13
小学生学习指导(小军迷联盟)(2020年9期)2020-10-14
房地产导刊(2020年7期)2020-08-24
作文与考试·小学高年级版(2019年5期)2019-03-20
汽车杂志(2018年6期)2018-06-25
求学·理科版(2016年3期)2016-03-23
轻兵器(2001年7期)2001-08-01
