
基于无刷直流电机的自适应控制系统及应用*
2020-12-26 02:57刘光宇
火力与指挥控制 2020年11期
谢 伟,刘光宇
(杭州电子科技大学自动化学院,杭州 310000)
0 引言
无刷直流电机具有效率高、单位体积磁通密度高、主设备要求低、电磁干扰低等特点,被广泛应用于家庭、医疗设备、交通、运动控制等领域[1-5]。由于电机系统负载的变化会产生扰动,进而导致无刷直流电机的输出扭矩发生变化[6]。目前,对于无刷直流电机控制系统主要采用经典PID 控制。然而PID控制器的性能受控制器恒增益参数的影响,同时也受到控制器恒参数调节不当的影响,利用PID 控制系统进行控制时,有时不能保证系统的稳定性或对系统的最优控制[7]。文献[8]中,提出了一种用于无刷直流电动机的混合模糊PID 控制器,其中采用遗传算法对模糊PID 控制器的输入输出比例因子进行优化,但由于负载扰动和转速的变化,模糊PID控制器也存在不确定性问题。文献[9]中,采用模糊PD 控制器对无刷直流的转速进行了控制,由于负载的变化,该控制器在速度响应方面产生了较大的超调。因此,需要采用一种能够改善系统动态特性的控制系统来提高系统性能的稳定性。
针对无刷直流电机系统中的负载扰动问题,将模型参考自适应控制应用于无刷直流电机控制系统中。实验平台采用STM8 为主控芯片,测速系统由3个霍尔传感器组成,电机驱动部分采用三相桥式驱动电路。并将其与传统PID 控制器进行比较。实验结果表明,该控制器能极大地提高系统的鲁棒性,在抗负载扰动上明显优于传统PID 控制器,在改善因负载扰动而导致系统输出不稳定上具有重要意义。
1 无刷直流电机系统数学模型
三相无刷直流定子采用三相无中性Y 形连接,转子采用永磁结构。在忽略电机的换向过程以及磁滞和涡流对磁路的影响下,无刷直流电机的电压平衡方程可表示为[10]:
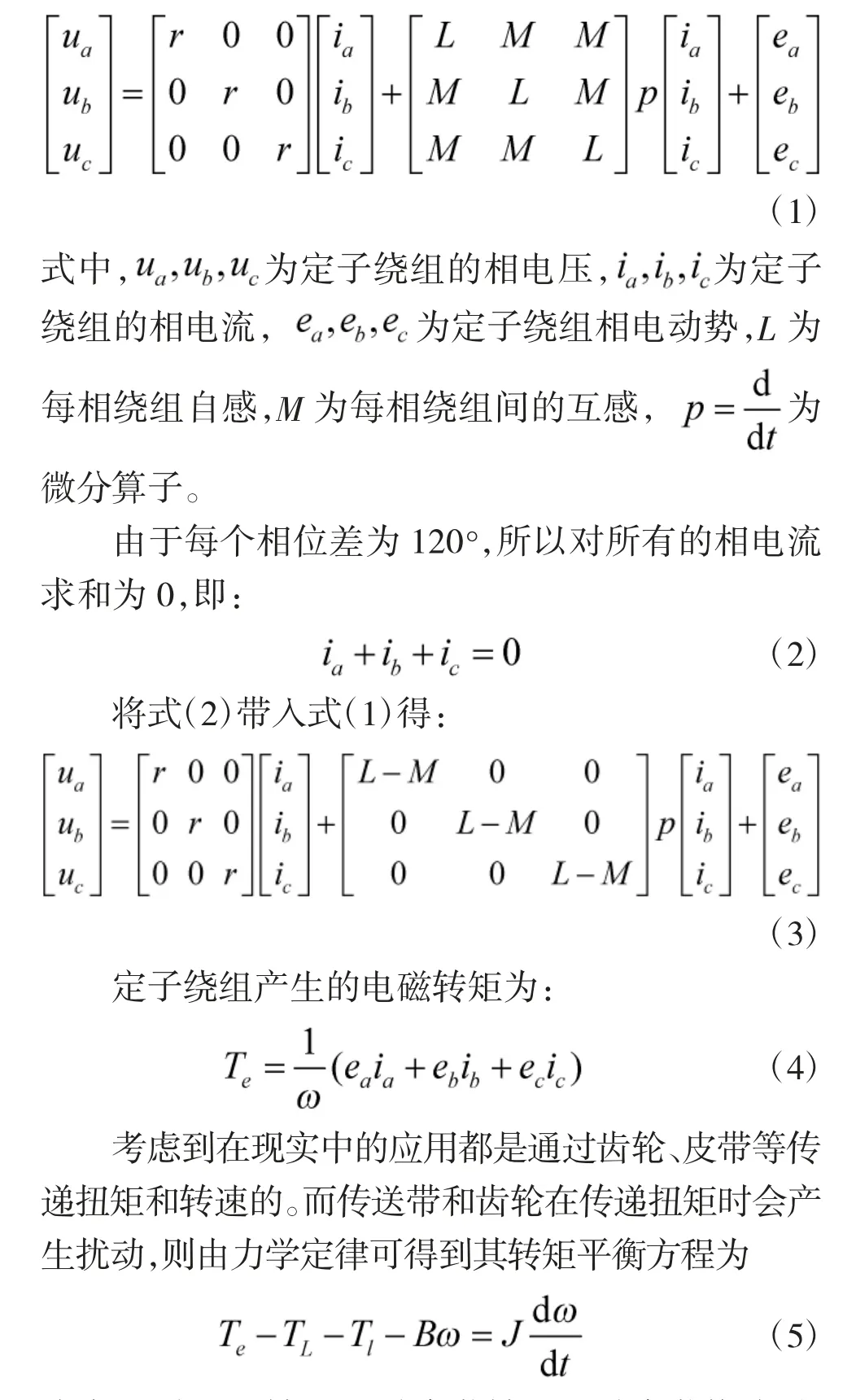
式中,Te为电磁转矩,TL为负载转矩,Tl为负载扰动项,B 为阻尼系数,ω 为电机转速,J 为电机的转动惯量。
2 模型参考自适应控制器设计
设计自适应控制律的方法主要有局部参数最优设计方法和基于Lyapunov 稳定性理论的设计方法等。前者主要有梯度法、变尺度法、共轭梯度法、牛顿拉夫森法等。但通过局部参数最优设计方法设计的模型参考自适应控制器不能保证系统的全局稳定性[11]。因此,本文采用Lyapunov 第二方法,将设计自适应控制律的问题转化为系统稳定性问题,来保证系统的全局渐进稳定性。图1 为模型参考自适应控制系统的结构框图:
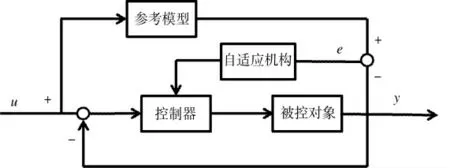
图1 模型参考自适应控制结构图
模型参考自适应控制的核心问题是设计一个合适的自适应律,使得广义误差e 趋向于0,从而使得被控对象系统的性能与参考模型的性能完全相同[12]。则有:

3 实验部分
实验平台由无刷直流电机、变速箱、驱动带和磁粉制动器组成,如图2 所示。实验平台的主控芯片为STM8S105K6T6,采样周期为25 ms,无刷直流电机由三相桥式电路驱动,测速部分通过3 个霍尔传感器对位置检测,从而检测电机转速。
实验步骤如下:
Step 1:选择参考模型以及自适应增益;
Step 2:选择输入信号u(t);
Step 3:采集当前系统实际输出和参考模型输出;
Step 4:通过式(13)计算补偿后的u(t);
Step 5:t→t+1,返回Step 3,继续循环。
实验参数选择如下:

在实验中,为了测试系统的抗负载扰动能力,通过磁粉制动器在系统达到稳态后,将负载由0 N突然提高到20 N,当输入信号为阶跃信号,实验结果如图3~图7 所示。
由图3 可以看出,在系统初始状态下,系统参数能够很好地向参考模型收敛,在增加负载后,参数能够动态适应系统。为了让数据更加直观,对实验数据进行指标分析,如下页表1 所示。
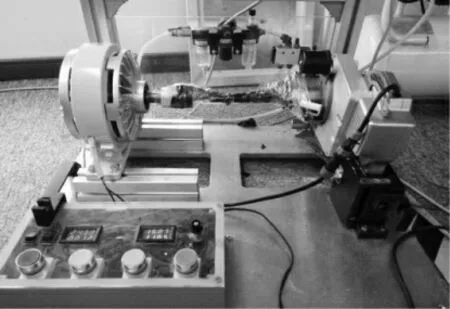
图2 实验平台
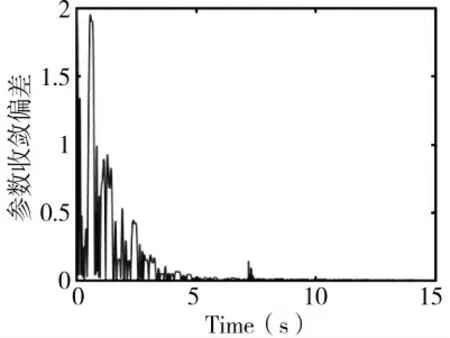
图3 参数收敛过程
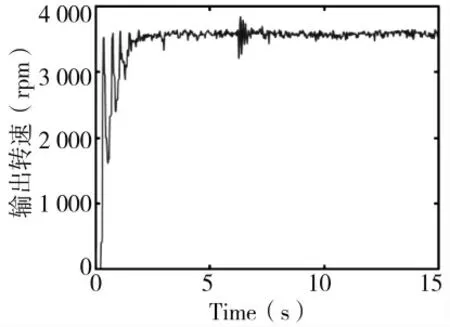
图4 模型参考自适应控制
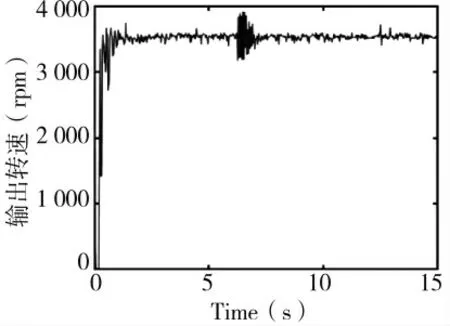
图5 PID
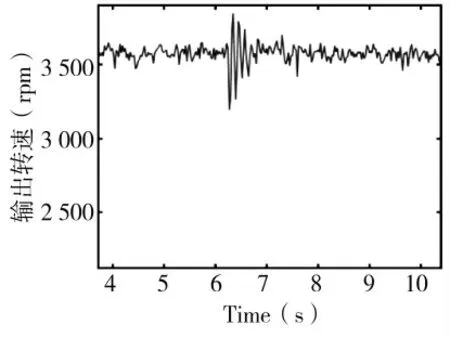
图6 模型参考自适应控制局部放大
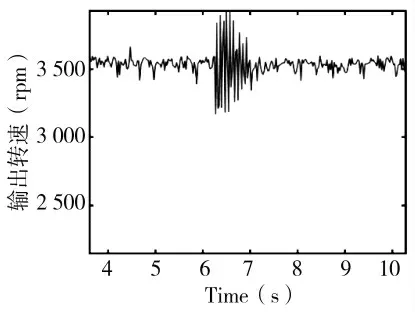
图7 PID 局部放大
由图4 和图5 可以看出,在零初始状态时,空载情况下,两种控制器均能很好地达到稳态,由于采用模型参考自适应控制时,初始状态系统参数与参考模型参数相差较大,自适应调节系统参数需要的时间较长,因此,在初始状态下模型参考自适应控制器的调节时间相比于PID 控制器慢1.3 s,在系统处于稳态时,通过磁粉制动器突然将负载由0 增加到20 N,此时系统状态如图6、图7 所示,两种控制器在受到负载扰动后系统的输出均受到了不同程度的波动,但是采用模型参考自适应控制器时恢复到稳态,所用时间比PID 控制器要快0.7 s,而在此过程中,采用PID 控制器在受到负载扰动后产生的超调量也比模型参考自适应控制器大4.52%。由此可见,模型参考自适应控制器在抗负载扰动能力上明显优于PID 控制器,系统的鲁棒性更好。
4 结论
针对因负载扰动而导致无刷直流电机系统输出不稳定的问题,本文设计了基于Lyapunov 稳定性理论的模型参考自适应控制器,将其应用于无刷直流电机系统中,实验表明,在负载突然变化时,模型参考自适应控制器相比于PID 控制器,具有更好的抗负载扰动能力,极大地提高了系统的鲁棒性,在改善因负载扰动而导致系统输出不稳定上具有重要意义。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
上海师范大学学报·自然科学版(2022年3期)2022-07-11
汽车实用技术(2022年12期)2022-07-05
中国自行车(2022年3期)2022-06-30
汽车实用技术(2022年5期)2022-04-02
北京航空航天大学学报(2021年7期)2021-08-13
科学与财富(2019年11期)2019-08-06
网络空间安全(2019年8期)2019-03-18
电机与控制学报(2018年9期)2018-05-14
湖南师范大学学报·自然科学版(2014年5期)2014-11-14
