行业动态(新技术)
2020-12-25 12:39
机器人技术与应用 2020年5期
依靠甲醇供能的微型机器人问世
近日,美国南加州大学的研究人员研发出一款名为“RoBeetle”的微型机器人,它可以依靠甲醇来供能,目前该成果已发表在期刊《科学机器人》上。
据介绍,研究人员设计了一种微型人造肌肉系统,可以像真的肌肉一样收缩和放松,通过采用覆盖有铂粉的镍钛合金线加快甲醇蒸汽的燃烧。这一过程产生的热量会导致机器人腿部的电线缩短,待冷却后重新伸展,以此驱动RoBeetle 的运动。
RoBeetle 重量仅88 mg,但是可以拖运是自身重量 2.6倍的物体。它还可以额外携带 95 mg 的燃料,续航时间长达 2h。RoBeetle可以爬坡,也可以在不同纹理的表面上行进,比如玻璃、泡沫睡垫、混凝土人行道等。

未来,研究人员需要进一步研究如何实现机器人的燃料添加功能,从而实现在更长的时间内持续供能。研发人员表示,如果能够对 RoBeetle 进行编程并实现与操作者通信,该机器人还可以用于人工授粉或协助手术等更多场景。
(来源:科学网)
华为新增机器人和自动驾驶专利
8 月18 日,华为技术有限公司公布了一项新专利——一种机器人的控制方法、装置、机器人以及存储介质。
据专利摘要显示,该方法包括:获取目标对象的位置信息;根据目标对象的位置信息控制机器人转动;在机器人旋转的过程中,动态调整机器人上用于模拟眼部特征的显示模块的输出画面。该申请提供的技术方案通过显示模块的输出界面模拟机器人的眼球运动,移动过程中无需马达驱动实现偏转,响应时间较短,实现了平滑凝视跟踪行为,提高了拟人化程度以及凝视跟踪行为的准确性,能够更好地使用机器人对孩子进行陪伴以及教育,增强了人机交互的体验感。
在自动驾驶方面,华为公司近日公布了2 项专利信息:一种机动车辆自动驾驶方法及终端设备,一种基于自动驾驶技术的资源确定方法及装置。
其中,前一项专利摘要显示,该自动驾驶方法包括:终端设备获取机动车辆所在位置的车辆外部环境数据和机动车辆的初始定位精度;所述终端设备根据所述车辆外部环境数据和所述初始定位精度确定所述机动车辆的目标驾驶参数;所述终端设备控制所述机动车辆按照所述目标驾驶参数行驶。由于终端设备根据车辆外部环境数据和初始定位精度确定机动车辆的目标驾驶参数,所以目标驾驶参数会随车辆外部环境数据的不同而变化,进而与外界环境相匹配,提高机动车辆自动驾驶的安全性。
后一项专利摘要显示,该申请用来解决物理位置临近的多个车辆发射激光信号时出现干扰的问题。该方法包括:服务器确定第一车辆发射激光信号时所使用的第一时频资源及第一车辆所在的第一位置;确定第一位置所属的第一区域范围;当第一区域范围内存在第二车辆,第二车辆发射激光信号时所使用的第二时频资源与第一时频资源相同,在第一区域范围内用于发射激光信号的时频资源中确定包括空闲的时频资源的第三时频资源;服务器将第三时频资源发送给第一车辆,第一车辆使用第三时频资源发射激光信号。服务器为第一车辆发送空闲的时频资源,避免第一车辆与物理位置临近的多个车辆发射激光信号时出现干扰。
(来源:天眼查)
腾讯公布自动驾驶专利
8 月25 日,腾讯科技(深圳)有限公司公布了一项专利——自动驾驶方法、装置、设备、系统、车辆和计算机可读存储介质。
据专利摘要显示,该申请公开了一种基于神经网络的自动驾驶方法,神经网络包括经训练的第一特征提取部分、第二特征提取部分和决策部分,第一特征提取部分和决策部分是前馈神经网络,第二特征提取部分是卷积神经网络,方法包括:将与车辆的自动驾驶相关联的第一类数据输入第一特征提取部分以提取出第一类特征,第一类数据是一维数据;将与车辆的自动驾驶相关联的第二类数据输入第二特征提取部分以提取出第二类特征,第二类数据是多维数据;将第一类特征和第二类特征输入决策部分,以确定自动驾驶车辆当前的驾驶策略。
(来源:天眼查)
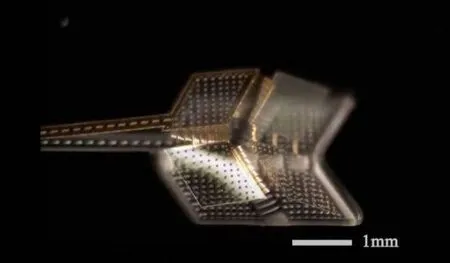
美国科学家研发出折叠式微型机器人
近日,美国密歇根大学研发人员研发出一种可折叠微型机器人。它能够通过加热被折叠成不同形状,以完成不同的任务。目前该成果已发表在期刊《先进功能材料》上。
据悉,该机器人尺寸不超过 1 cm,具有一个可折叠的金层、以及一块可充当执行器的聚合物折叠层。在电源和微控制器的作用下,电流通过金层时产生热量,从而控制机器人运动。机器人可以通过加热实现折叠,也可通过冷却伸展。当机器人需要固定时,可使系统过热,以对折翼进行编程(即改变它的位置)。
研发人员表示,该机器人可用于杀菌、净水或者在人体内畅通无阻地输送药物等。
(来源:cnBeta)
同济大学推出多用途智能无人船
近日,同济大学重庆研究院推出一款智能环境监测无人船。
据介绍,该款无人船采用流线型全碳纤维船体设计,具有自主实现监测作业、自主避障导航、污染追踪报警、环境治理等多个功能,同时采用先进的任务航线规划、自主避障算法,并配以多参数水质监测传感器及环境治理设备,可实现环境监测协同治理。
无人船项目负责人表示,该款无人船是为水下打捞机器人提供的无人化搭载平台,并可实现溺水人员的大范围快速定位。与其协作的溺水打捞机器人,可实现溺水人员监测、溺水人员定位、溺水人员打捞全过程的无人化。
智能无人船及溺水打捞机器人目前还处于前期完善阶段,需要攻克的关键技术有水下机器人自主导航、水下机器人自主避障、无人船自主导航避障及图像识别、深度学习算法等。
另外,智能无人船不仅具备救援功能,经过简单改造,还可以兼备水上快速运输功能。

(来源:同济大学)
阿里达摩院自动驾驶技术升级
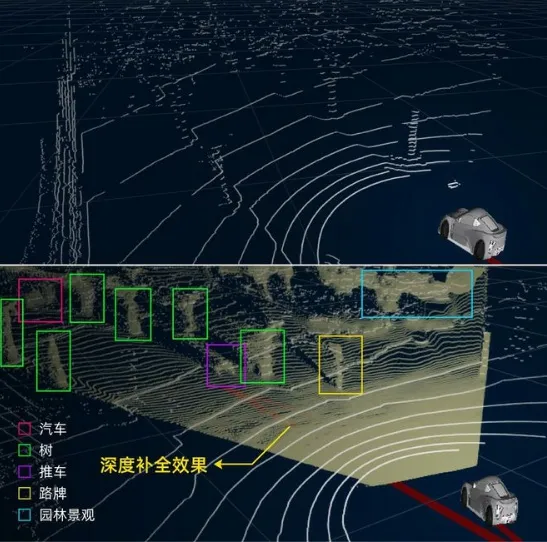
日前,阿里巴巴达摩院宣布,其自研感知算法实现了对低线束LiDAR(激光雷达)的高线束模拟,间接将LiDAR 线束量提升3 倍以上,可实现低成本普通激光雷达替代高成本雷达。能探测障碍物的激光雷达是自动驾驶车辆最重要的“眼睛”,该算法突破相当于用“低像素相机拍出单反相机效果”,可大幅降低自动驾驶感知部件成本。
在自动驾驶实际落地场景中,需要高密度的LiDAR 才能满足感知需求,而64 线以上LiDAR 成本居高不下,成为自动驾驶大规模商业化瓶颈之一。达摩院自动驾驶实验室环境感知算法能结合摄像头图像,对低线束LiDAR 点云进行深度补全及语义识别,实现更稠密的激光雷达点云图3D重建效果,不仅可以更精确地读取障碍物距离及形状等信息,也可以更精准判断其类别信息。
如图所示,上图为低线束LiDAR 原始点云,下图为经达摩院算法深度补全后的点云,LiDAR 线束量提升3 倍以上,且自动驾驶车辆更好辨别出了障碍物。
在精度指标上,达摩院采用低线束激光雷达输入能够达到,实现了采用高线束激光雷达输入能够达到的平均水平,50m 内障碍物距离信息读取平均误差为25cm 左右,同时,达摩院算法技术在进行深度补全任务时可达到100fps 的处理能力。
(来源:网易科技)
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
水上消防(2020年2期)2020-07-24
中国特种设备安全(2019年5期)2019-07-16
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
宇航计测技术(2018年3期)2018-09-08
中国司法鉴定(2015年4期)2015-02-28
舰船科学技术(2015年8期)2015-02-27
振动、测试与诊断(2014年6期)2014-03-01