基于改进人工势函数的航天器近距离安全控制方法1)
2020-12-23 01:16许丹丹张进
力学学报 2020年6期
许丹丹 张进
∗(空军工程大学航空机务士官学校航空机械工程系,河南信阳 464000)
†(国防科技大学空天科学学院,长沙 410073)
引言
随着空间技术的进步,世界主要大国或组织大力发展空间在轨近距离操作服务技术.对自主交会对接、空间目标监视、推进剂补给等单航天器操作技术进行了较为充分的验证[1-3].大部分接触式在轨服务需要靠近目标进行操作,而在近距离空间任务中,航天器不与其他空间目标相撞是轨道飞行的基本要求[4-5].因此,航天器近距离接近技术首先需要解决安全逼近控制问题.
人工势场法(artificial potential fields,APF) 是最常用的考虑碰撞约束的航天器安全制导与控制方法.APF 的优势是:能够引导飞行器进行避撞机动,并且能够利用势场函数的负梯度方向来设计避撞控制律.APF 方法结构简单、计算量小,在实时避撞和平滑的轨迹控制方面得到广泛的应用.在1986 年,APF 方法最早由Khatib 在机械臂避撞任务中提出[6],1993年,McInnes 将APF 引入到航天器的自主接近机动控制[7].目前,APF 研究已经扩展到考虑分布式控制[8]、具有固定障碍物回避的自主交会[9]轨道组装的自主控制[10]和星群编队控制[11].McCamish 等[12]、Nastasi等[13]提出结合线性二次型调节器(linear quadratic regulator,LQR) 和APF 用于解决圆轨道目标最优接近控制问题.在此基础上,Bevilacqua 等提出沿墙跟踪方法[14],Palacios 等实现椭圆轨道目标的跟踪控制[15],Wang 等[16]提出基于碰撞概率的目标交会控制.美国的Prox-1 任务首次成功完成基于APF 的自主接近操作[17-18].此外,朱安等[19]、艾海平等[20]还提出了空间机器人双臂捕获卫星操作过程避免关节冲击破坏的避撞柔顺控制问题.
然而,将APF 控制算法直接用于航天器近距离操作任务,还存在以下不足.首先,基于最小距离进行碰撞预警的存在虚警率较高的问题[21-22].其次,防止服务航天器与目标航天器的接近碰撞是最重要的,使用APF 控制方法来控制接近目标的速度可能违背目标附近接近速度安全走廊要求.最后,因为大多数航天器都只安装一组不同推力大小的常推力发动机,不能提供任意连续变化的推力,所以基于APF 控制方法计算得到的任意连续变化加速形式的控制律在大多数实际任务中很难实现.
针对上述问题,为了提高机动效率,增大机动安全性,本文以航天器交会对接的近距离操作任务为背景,设计一种基于改进APF 的防撞控制方法,并利用数据仿真来验证改进算法的特性.
1 基于人工势函数的安全逼近
如图1 所示,在目标航天器轨道坐标系(LVLH)中,服务航天器进行交会、逼近机动时,不仅需要确保自身的轨迹安全,即不与空间内的障碍物相碰撞,还要保证与目标航天器安全接触.因此,当航天器进行轨迹规划时,一定要考虑碰撞规避问题.
采用人工势函数控制航天器时,控制加速度表示为所有引力和斥力的和.本文研究探讨了与位置误差、速度误差相关的人工势函数[23]用于控制航天器.服务航天器的控制加速度表示为所有引力和斥力的和


图1 相对运动框架Fig.1 Relative motion Frame
其中,ag为目标航天器的引力加速度,ao为障碍物的斥力加速度,am为目标航天器的斥力加速度.
1.1 引力加速度
引力加速度主要是指由终端位置引力场所产生的加速度,导致服务航天器从初始位置运动到终端位置.常见的引力场是二次型引力场,引力场函数Vg选为

式中,rcg=rg−rc为服务航天器到终端目标的位置矢量,rg为终端位置矢量,rc为初始位置,取.
由于终端位置的吸引力,服务航天器所需的速度vg为

其中,吸引力速度影响函数kg为

kg的选择决定了控制算法的收敛性.式(4)中,(1−e−t)可以避免在初始时刻,服务航天器的控制加速度过大,k和bg为常数,vmax为估计的最大相对运动速度.
由终端引力场所产生的航天器加速度ag表示为

其中,v为服务航天器的相对速度矢量,∆t为服务航天器的制导控制计算的时间步长.
1.2 斥力加速度
斥力加速度主要是由远离障碍物的斥力场提供的,斥力场是距离的单调减函数:航天器距离障碍物越近,斥力势函数的值就越大.障碍势能选高斯函数形式

其中,rco=rc−ro表示服务航天器与障碍物的相对位置矢量;rc为服务航天器的位置矢量;ro为障碍物的位置矢量;标准偏差σ=(Lo+D)/3,当航天器相对速度接近零时障碍物表面略大于一个标准偏差,围绕障碍物的安全区域更合理.
障碍物控制区域的球半径D为

式中,d0为常数,L0为障碍物与服务航天器的半径和,是最小制动距离,amax为最大加速度数值.

式中,由于避开障碍物所需的速度vco为

式中,ki和ko为常数.斥力速度影响参数ko的选择与吸引力速度影响参数kg有关,以确保航天器的速度能达到所需的临界阻尼.
1.3 目标斥力加速度
服务航天器进行交会、逼近机动时,终端位置为目标航天器,因此,航天器在防止与其他物体碰撞的同时,需要安全逼近到目标表面.尤其当服务航天器与目标航天器非常接近时,应对防撞控制机动的范围需要进行一定限制,因此,安全对接距离约束表示为

其中,rmin表示两航天器的最近距离,L表示服务航天器与目标航天器的半径和.

其中,ks通常大于或等于0.如果ks=0,则vm不受目标位置的影响.
由目标航天器的斥力场所产生的航天器加速度,表示为

2 改进的人工势函数
针对APF 控制方法做出三点改进:第一点是采用瞬时碰撞概率法代替最小距离法进行碰撞预警.第二点是基于速度安全接近走廊设计目标斥力来减慢服务航天器的接近速度.第三点是改进执行加速度实现形式,设计了两种实现形式的控制执行加速度.
2.1 基于瞬时碰撞概率的人工势函数
为了提高决策准确度并减少机动次数,设计一种基于瞬时碰撞概率的APF 控制方法.引力和斥力函数的形式与影响因素保持不变,只改变碰撞预警方式,即当航天器与障碍物的瞬时碰撞概率PcP(P为触发碰撞预警的门限值)时,考虑由障碍物的斥力场所产生的服务航天器加速度.
将服务航天器简化为质点,其位置分布服从相对轨迹偏差传播模型,瞬时碰撞概率的计算公式为

式中,ρ 为概率密度函数,C表示相对位置分布的协方差矩阵,积分域Ωc为障碍物的影响区域.
2.2 基于速度走廊设计目标航天器斥力
服务航天器执行终端位置为目标航天器的机动时,无论过程中出现任何故障或偏差,都必须要保证服务航天器与目标航天器不发生碰撞.以往应对目标防撞控制机动的范围限制是根据经验的最小距离约束,没有考虑速度安全接近走廊约束.因此,本文考虑根据速度安全接近走廊设计目标航天器斥力.速度安全接近走廊可表征为

式中,vd是一个常数,本节取vd=5.0×10−4m/s.如果与标准状态向量的偏差达到了预先计算的安全界限,也就是说,这个轨迹就会被判断为“不安全”,从而发出防撞控制机动指令.
在此,采用接近安全参数ks来修改服务航天器接近目标时所需的排斥速度,表达式为

本文取ks=0.8[1 −e−(Vg−Lo/2)].
由目标航天器的斥力场所产生的航天器加速度形式仍如式(12).
2.3 设计控制加速度变化形式
本文考虑实际发动机运动机理,将实际推力形式与人工势函数结合,控制服务航天器安全机动.实际飞行中的推力形式通常为以下两种形式,具有上限和恒定变化率的加速度,以及设置多个档位开关的bang-bang 加速度.假设在近距离操作的研究中忽略质量变化对控制的影响,则航天器被控加速度的设计直接对应于推进器的设计.发动机在3 个主轴的运动方向上均有一个最大加速度限制amax.以下加速度设计表示的是一个主轴方向上的加速度ai(i=x,y,z).
2.3.1 加速速率设计
假设航天器由安装在某方向的1 台发动机提供推力,最大加速度上限为amax,在到达最大加速度前的加速度变化率为; 发动机关机时,加速度由当前值逐渐减小到零的变化率也为,则发动机工作过程中某时刻t的加速度满足均满足式(16)

其中,at−1是前一时刻的加速度.假设发动机推力由零增加到最大或由最大减小到零需要一定时间为dt,加速速率=amax/dt.
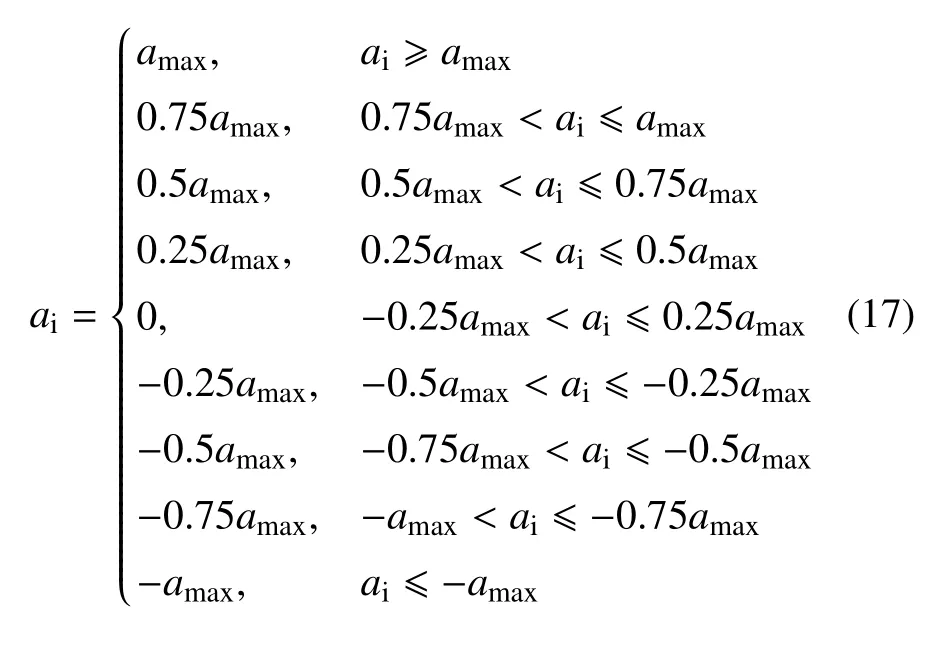
2.3.2 bang-bang 控制多档位设计
假设航天器某方向上的推力由该方向上安装的4 个推力相同为a0=amax/4 的发动机共同提供,设置开关逻辑控制发动机工作,开关分档如式(17)所示
3 仿真算例
近距离机动中,时间和推进剂消耗是评估控制算法性能的主要指标.机动时间td单位为s,推进剂消耗质量∆m单位为kg.假设障碍物为固定障碍物,其运动状态相对目标不发生变化,在目标航天器质心相对坐标下,服务航天器以及固定障碍物的仿真初始参数配置如表1 所示.

表1 基于最小距离的APF 仿真初始参数Table 1 Initial parameters of APF simulation based_____________on minimum distance
仿真中采用四阶Runge-Kutta 方法积分C-W 方程来计算相对轨道,时间步长为∆t=1 s.服务航天器的半径为1 m,质量均为100 kg.假定航天器的质心位于几何中心,位置和距离传感器可以提供理想的信息;通过三个主轴上各安装最大推力为1.0 N 的推进器执行机动,航天器的最大相对加速度不超过0.01 m/s2,最大相对速度不超过1 m/s.卫星采用化学推进系统,比冲Isp=300 s,脉冲施加次数没有限制.
3.1 基于碰撞概率的APF 仿真分析
交会策略的目的是将补给星带进预定的范围内,同时确保避免碰撞.当补给航天器到达目标外表面的0.5 m 范围内,交会结束.加速度随着APF 制导方法的计算结果自由变化,没有限制.假设3 个固定障碍物放置在最差的情况下,即追踪航天器运动的路径上,直径为1.2 m.服务航天器的状态标准差为球形高斯分布,各个方向均相同.初始状态导航偏差协方差为

3.1.1 静态障碍物
图2 给出了采用两种不同APF 控制方法的服务航天器轨迹图,其中红色实线代表基于最小距离的APF 控制方法、黑色虚线代表基于碰撞概率的APF控制方法.从图2 中可以看出,两种轨迹差别较小.这一方面验证了基于瞬时碰撞概率的APF 控制方法的可行性,另一方面,瞬时碰撞概率仅仅作为APF 控制方法制导的门限,对于静态障碍物的控制轨迹改进并不显著.

图2 两种碰撞预警门限的航天器轨迹对比Fig.2 Comparison of spacecraft trajectory between two collision warning thresholds
3.1.2 动态障碍物
为进一步检验控制方法对复杂环境的有效性以及适应性,将球形障碍改变为移动障碍:其球心按照相对轨道运动模型进行运动,球心初始位置矢量为(−2.93 m,14.89 m,7.47 m),速度矢量为(8.4 mm/s,6.7 mm/s,11 mm/s).利用基于最小距离APF 和基于瞬时碰撞概率的APF 制导方法分别对服务航天器的交会任务进行控制,同时统计机动过程的总推进剂消耗.
两种预警方法仿真得到的轨迹对比如图3 所示,图中红色粗实线为基于最小距离机动的服务航天器轨迹图,推进剂消耗为0.049 kg; 黑色细虚线为基于瞬时碰撞概率机动的服务航天器轨迹图,推进剂消耗为0.023 kg.从图3 中可以明显看出,基于最小距离机动的情况下出现虚假报警情况,导致服务航天器进行了较多的轨道机动,从而造成额外的推进剂消耗;而基于碰撞概率的APF 方法有效地减少了虚警率,避免额外的机动,减少了不必要的推进剂消耗.
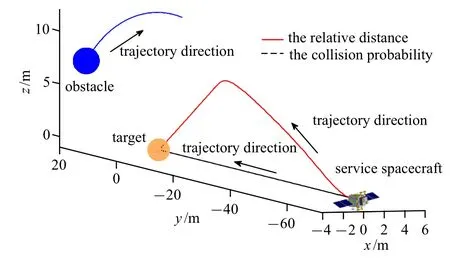
图3 服务航天器和动态障碍物相对目标航天器的运动轨迹Fig.3 Motion trajectories of service spacecraft and dynamic obstacles relative to target spacecraft
3.2 基于速度走廊设计目标航天器斥力的仿真分析
以增加目标斥力的APF 方法进行仿真,所获得的被控航天器轨迹如图4 中红色细实线所示,而黑色粗虚线为目标斥力不考虑速度安全接近走廊的服务航天器轨迹.

图4 目标斥力考虑与不考虑速度安全接近走廊的航天器轨迹对比Fig.4 Comparison of spacecraft trajectory for Target repulsion with and without consider the speed safely approaching corridor
图5 显示了有目标斥力与没有目标斥力的相对速度随时间的变化情况,图6 显示了相对速度和相对距离的对应关系,其中红色细实线表示目标斥力考虑速度安全接近走廊的航天器接近速度,黑色粗虚线表示目标斥力不考虑速度安全接近走廊的航天器接近速度.从图5 和图6 中可以看出,当被控航天器快接近目标航天器时,目标斥力考虑速度安全接近走廊可更有效减缓靠近目标的速度,满足速度安全接近走廊要求,保证了接近的安全性.同时,图4中目标斥力考虑比不考虑速度安全接近走廊的航天器任务总时间大大增加.

图5 航天器接近速度随时间变化情况(目标斥力考虑与不考虑速度安全接近走廊)Fig.5 Spacecraft approaching speed vs time(target repulsion with and without consider the speed safely approaching corridor)

图6 航天器接近速度随距离变化情况(目标斥力考虑与不考虑速度安全接近走廊)Fig.6 Spacecraft approaching velocity vs distance(target repulsion with and without consider the speed safely approaching corridor)
3.3 设计加速度的仿真分析
在本例中,分别使用了具有上限和恒定变化率的加速度和多个档位开关的bang-bang 加速度.设置初始任务参数与表1 相同,机动过程与交会机动相同.获得的轨迹如图7 所示.

图7 不同加速度实现形式的航天器轨迹对比Fig.7 Comparison of spacecraft trajectories with different acceleration implementations
图8 和图9 显示了具有加速度上限和恒定变化率的模拟结果,图10 和图11 显示了多个档位开关的bang-bang 加速度.从图8 到图11 可以看出加速度满足所设定的要求,而且加速度在初始阶段迅速变化,因为引力加速度与距离有关.在初始阶段,目标和受控制的航天器之间的距离相对较长,对应引力加速度很大.由于受控制的航天器与障碍物之间的斥力增加,机动过程的加速有几个显著的变化.图9 和图11 中速度的变化趋势与图5 中所给出的历史变化趋势相似,都是先增大后逐渐趋近零,验证了改进的APF 方法的安全性和有效性.然而,如图9 所示,当受控制的航天器接近目标时,速度总是会略微振荡,对实际的任务操作是不利的.与图9 相比,图11 显示了更平滑的速度历史,这表明使用多个档位开关的bang-bang 加速效果更好.

图8 具有上限和常变化率加速度形式的加速度随时间变化Fig.8 Time vs the acceleration with upper limit and constant variation rate of acceleration

图9 具有上限和常变化率加速度形式的速度随时间变化Fig.9 Time vs the speed with upper limit and constant variation rate of acceleration
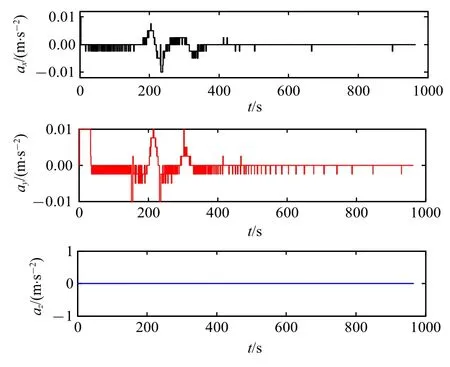
图10 多个档位开关bang-bang 加速度形式的加速度随时间变化Fig.10 Time vs the acceleration with the bang-bang thrust with multi-speed switches of acceleration

图11 多个速度档位开关bang-bang 加速度形式的速度随时间变化Fig.11 Time vs the speed with the bang-bang thrust with multi-speed switches of acceleration
针对两种加速度形式,统计了交会过程中总任务时间和发动机开关切换次数,如表2 所示.根据表2,这两种方法的总任务时间和发动机切换的次数是相似的,这表明使用多台小发动机来代替一台大发动机能带来更平滑的速度剖面,但不需要额外的任务时间或更多地发动机开关负荷.

表2 不同加速度形式机动过程的统计参数Table 2 Statistical parameters of maneuvering processes with different acceleration forms
4 结论
本文提出了一种基于人工势函数控制方法改进的航天器近距离操作安全控制方法.首先,将碰撞概率计算纳入了判断碰撞的标准,避免虚假预警,提高决策准确度;其次,利用目标的速度安全裕度和控制边缘来制定目标排斥力,以减慢航天器逼近的速度.第三,设计两种实用的推力形式,包括带有上限和恒定变化率的推力,以及多个档位开关的bangbang 推力,用来代替已有研究中使用的连续变量推力形式.
结果表明,改进的基于人工势函数的方法能够成功地帮助航天器安全完成近距离操作,采用碰撞概率的评判可以减少额外的轨道机动,节省燃料;考虑目标的速度安全裕度和控制边缘设计目标斥力,能保证安全的相对接近速度.与带有上限和恒定变化率的推力形式相比,多个档位开关的bang-bang 推力形式可以提供一个较为平滑的速度.本文设计的安全控制算法方法可以提高航天器近距离操作的安全性和有效性.
猜你喜欢
国际太空(2022年7期)2022-08-16
装备制造技术(2020年3期)2020-12-25
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
国际太空(2019年9期)2019-10-23
创新作文(1-2年级)(2019年4期)2019-10-15
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18