基于蚁群算法的码垛机器人轨迹规划方法研究
2020-12-23 08:30雷学鹏
黑龙江科学 2020年24期
雷学鹏
(广西理工职业技术学院,广西 崇左 532200)
0 引言
码垛机器人可以进行多生产线作业,且作业占地面积较小、作业涉及范围较大,能够有效提高生产效率,减少人力物力成本。但是码垛机器人在作业过程中,受场地环境中各种障碍物的影响,不能实现运动轨迹最短化,影响了操作效果。要对码垛机器人进行运动轨迹规划,使其有效躲避障碍物,从而实现作业效率与效果的最优化。
目前,已有大量研究人员对码垛机器人轨迹规划问题进行了研究。文献[2]提出一种基于Matlab与DMC的工业机器人轨迹规划方法,该方法运用Matlab建立了一个6自由度的仿真界面,通过该界面上设计机器人运动的矩形轨迹,得到机器人多关节的运动曲线。采用轨迹插补算法得出矩形轨迹的具体实现方式,从而完成机器人的轨迹规划。分析实验结果可知,该方法能预测机器人的运动轨迹,但是不能有效躲避路径中的障碍物。文献[3]提出一种基于Bezier曲线的移动机器人轨迹规划方法,该方法依据Bezier曲线进行路径规划,以达到缩短路径长度的目的,仿真结果虽然证明了该方法的有效性,但是该方法存在规划用时较长的问题。
为解决上述方法存在的问题,提出一种基于蚁群算法的码垛机器人轨迹规划方法。
1 基于蚁群算法的码垛机器人轨迹规划方法
1.1 目标路段障碍物识别
由于码垛机器人会在各种环境中进行作业,环境中的障碍物会对机器人的运动轨迹造成较大的影响,所以需要对目标路段中的障碍物进行识别。基于光纤传感原理识别目标路段中的障碍物,光纤传感器在工作过程中会发射出窄线宽光径光束,该光束被分成两束光,两束光在光路中通过相反的方向进行传播,在顺时针方向中,在经过环形器到达耦合器后又会被分成两路,接着两路光会出现互相干涉现象,而干涉信号则会被光电探测器接收,因此顺着逆时针方向进行光束传输,即可得到目标路段中障碍物的具体位置,从而实现障碍物的有效识别。
根据光纤传感原理,识别目标路段的障碍物具体流程主要分为三步,描述如下所示:
第一,将多个障碍区样本信息进行傅里叶转换,可以得到工作环境中的障碍物的出现频率f,则可以采用障碍物出现频率f来检测出障碍物所对应的端点位置[5]。
第二,将得到的障碍物端点位置信息传输至全相位滤波器中,计算出滤波输出ug(n)的归一结果,然后对整体障碍物数量进行计算,把该数值和f做综合即可以提取出障碍物的多方位信息。
第三,将提取到的障碍物多方位信息反馈至耦合器中,通过计算即可对目标路段中的障碍物进行识别。
1.2 构建目标路段轨迹规划模型
根据得到的目标路段障碍物识别结果,基于蚁群算法对码垛机器人的轨迹进行规划,构建码垛机器人轨迹规划模型。在模型中,通过蚁群算法寻找码垛机器人运动轨迹的最优匹配序列。在最优匹配序列的寻找中需要将原码垛机器人运动路段与码垛机器人目标运动路段之间的形状相似度视为蚁群信息单位,然后让蚁群在两个路段上行走。蚁群在行走过程中会在目标路段中不断积累信息素,目标路段上积累的信息素越多,且该路段与原码垛机器人运动路段的形状相似度越高,则具备越高的匹配概率。
构建的码垛机器人轨迹规划模型的数学表达式如下所示:
(1)
式(1)中,Fi代表原码垛机器人运动路段;Fj代表码垛机器人目标运动路段;τ1代表蚂蚁k在目标运动路段Fj上遗留的信息素,其可以通过公式(2)进行计算;τ2代表蚂蚁k在原运动路段Fi上遗留的信息素,其可以通过公式(3)进行计算;S(Fi,Fj)代表原码垛机器人运动路段与码垛机器人目标运动路段之间的形状相似度,即蚁群信息单位;m代表正常数;β代表原码垛机器人运动路段与码垛机器人目标运动路段之间的形状相似度影响转移概率的具体数值。
(2)
(3)
上式中,p代表蚁群中的蚂蚁数量;χ代表蚁群信息素的实际挥发系数;ΔτFi代表蚂蚁k选择原码垛机器人运动路段Fi时产生的实际信息素增量;ΔτFj代表蚂蚁k选择码垛机器人目标运动路段Fj时产生的实际信息素增量,其可以通过公式(4)进行计算:
(4)
通过公式(4)的计算结果得出蚁群在目标路段中的运动轨迹,从而实现码垛机器人运动轨迹的规划。
2 仿真实验验证
2.1 实验环境与参数设置
为验证所提基于蚁群算法的码垛机器人轨迹规划方法的有效性展开实验。选取某实际操作场景作为实验区域,在该区域中设置不同类型、不同大小的障碍物共30个。本次测试在CloudSim云计算环境中进行,网络带宽为80 MI·S-1、内存为8 GB,并采用MATLAB软件进行数据处理。
在上述实验条件下,利用基于蚁群算法的码垛机器人轨迹规划方法在实验区域内对码垛机器人的运动轨迹进行规划。在轨迹规划实验过程中获取该方法的实际性能,具体包括轨迹规划速度、轨迹规划结果与最优轨迹之间的相似度以及目标路段中障碍物的识别准确率。轨迹规划速度越快,轨迹规划结果与最优轨迹之间的匹配度越高,目标路段中障碍物识别准确率越高,说明该方法的轨迹规划性能越好。
2.2 实验结果分析
在多次实验下,得出基于蚁群算法的码垛机器人轨迹规划方法的轨迹规划速度与文献[2]方法和文献[3]方法的对比结果,具体如图1所示。
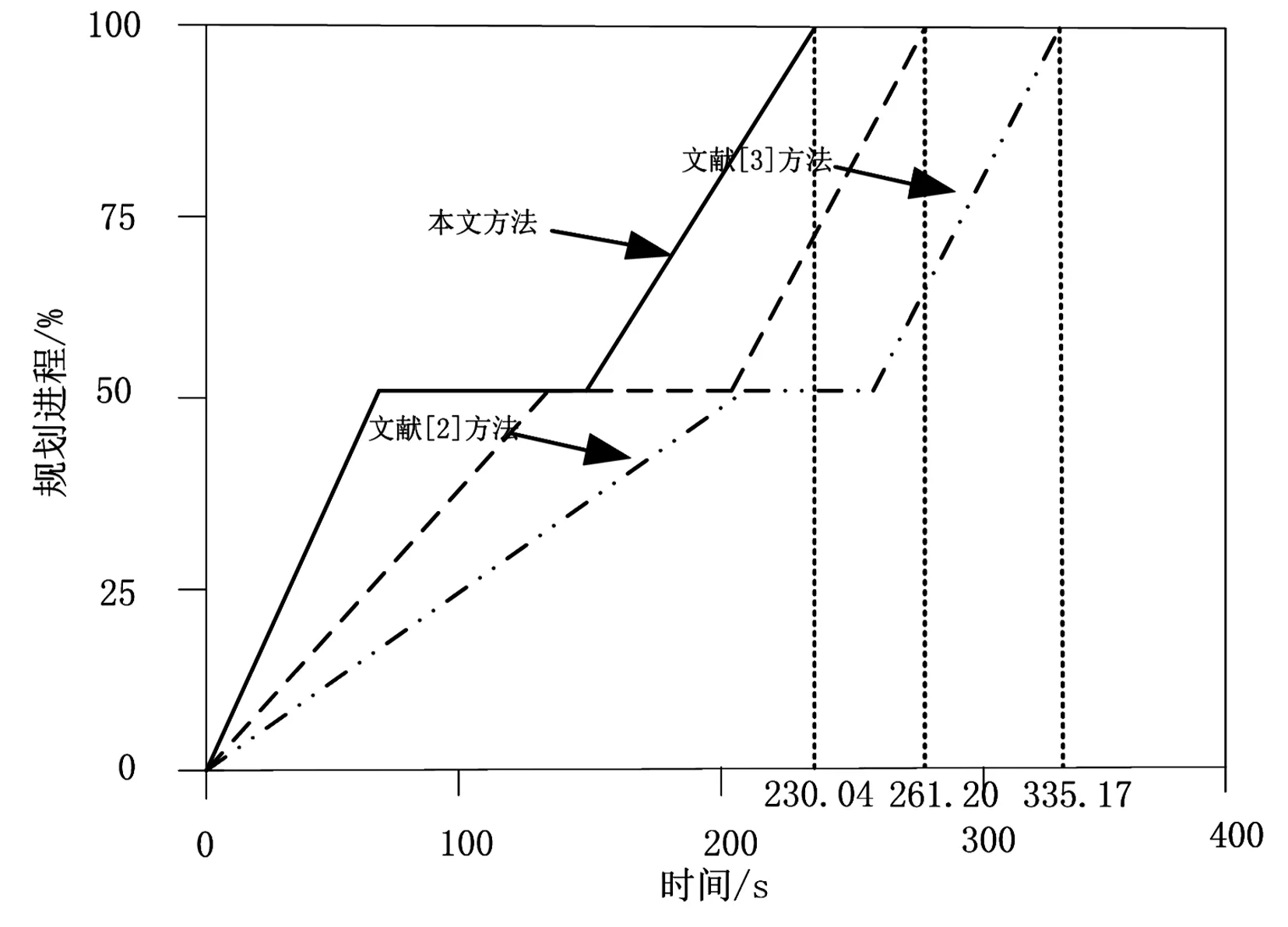
图1 不同方法规划速度对比结果Fig.1 Comparative result of planning speed of different methods
根据图1所示的轨迹规划速度实验结果可知,基于蚁群算法的码垛机器人轨迹规划方法在230.04 s时完成了路径匹配,而文献[2]方法在261.20 s时完成轨迹规划,文献[3]方法在335.17 s时完成轨迹规划。上述数据说明本研究方法用时较短,能够满足实际工程需求,这是由于本方法依据光纤传感器工作原理对目标路段中的障碍物进行了识别,从而降低了轨迹规划用时,提升了轨迹规划效率。
将运用基于蚁群算法的码垛机器人轨迹规划方法得到的轨迹与文献[2]方法和文献[3]得到的轨迹与最优轨迹进行对比,结果具体如图2所示。
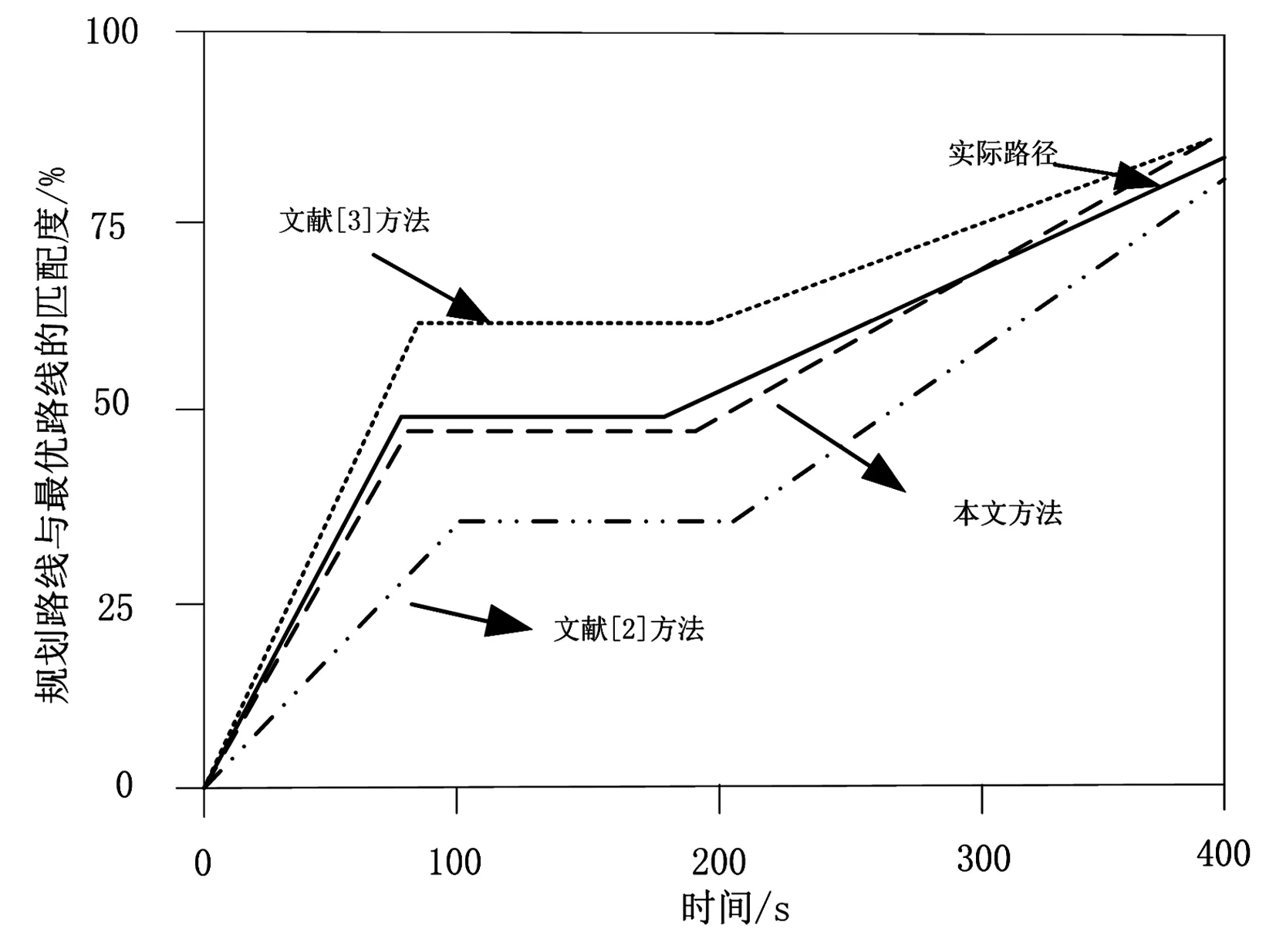
图2 路径匹配度实验结果Fig.2 Experimental results of path matched degree
根据图2的路径匹配度实验结果可知,基于蚁群算法的码垛机器人轨迹规划方法得出的规划路径与最优路径的匹配度较高,甚至在部分路段中能够实现完全拟合,说明运用本方法进行轨迹规划得出的结果可靠性较高。
运用基于蚁群算法的码垛机器人轨迹规划方法与文献[2]方法和文献[3]方法进行目标路段中障碍物识别准确率对比,结果如图3所示。
根据图3所示的目标路段障碍物识别准确率测试结果可知,基于蚁群算法的码垛机器人轨迹规划方法的障碍物识别准确率明显高于文献[2]方法和文献[3]方法,进一步验证了该方法的可靠性,该方法实现了对码垛机器人运动轨迹的准确规划。
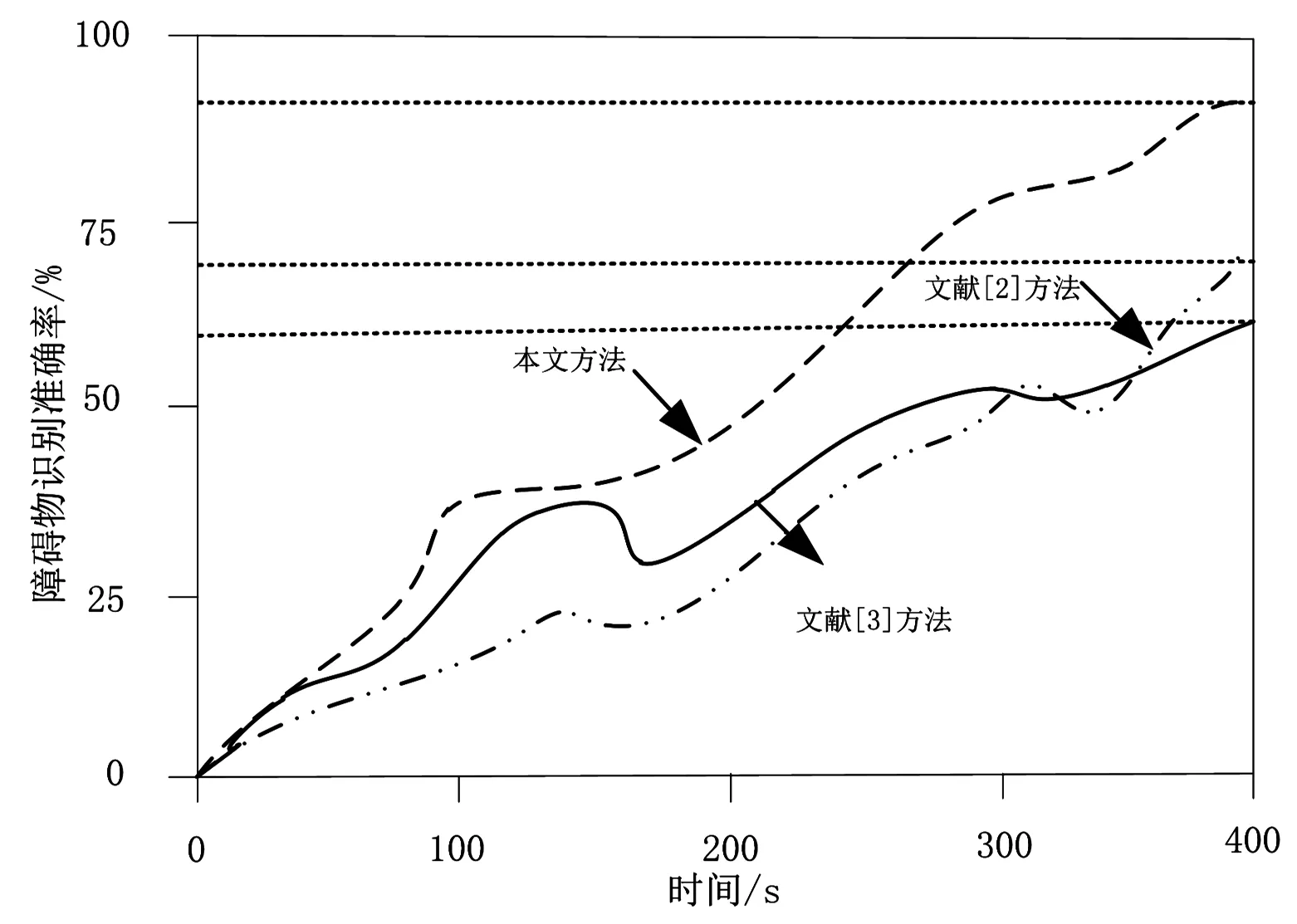
图3 不同方法障碍物识别准确率对比结果Fig.3 Comparative results of barriers identification accuracy rate of different methods
综上实验结果可知,基于蚁群算法的码垛机器人轨迹规划方法的轨迹规划速度、与最优路径的实际匹配度、障碍物识别准确率均具有较高水平,即基于蚁群算法的码垛机器人轨迹规划方法的轨迹规划性能较优。
3 结语
随着码垛机器人应用范围越来越广,需要研究一种方法对其运动轨迹进行合理规划,从而进一步提升其应用价值。基于蚁群算法建立了目标路段轨迹规划模型,通过该模型实现码垛机器人运动轨迹的优化。实验结果表明,该方法的规划结果优于现有方法,具有更高的规划效率与准确性,充分验证了该方法具有较高的应用价值。
猜你喜欢
橡塑技术与装备(2022年11期)2022-11-08
现代制造技术与装备(2022年1期)2022-02-21
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
电子制作(2019年20期)2019-12-04
中国交通信息化(2019年9期)2019-11-16
创新作文(1-2年级)(2019年4期)2019-10-15
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
智富时代(2018年5期)2018-07-18