
基于周边节点实时位置预测的无人机自组网路由协议*
2020-12-23 06:12郭科兵徐光辉
通信技术 2020年10期
郭科兵,徐光辉,丁 宁
(1.94672 部队,江苏 南京 211500;2.陆军工程大学,江苏 南京 210007;3.南京熊猫通信科技有限公司,江苏 南京 210007)
0 引言
无人机(Unmanned Aerial Vehicle,UAV)在军事和民用领域的应用越来越广泛,其军事用途超过25 年,主要包括边境监视、侦察和空中打击[1]。国内外在军用无人机方面都进行了大量的研究,现在已初有部分列入实际应用,如无人攻击机、无人侦察机以及无人机群执行军事打击任务等。在民用领域的应用也较多,例如作为电子警察进行公共安全管理,实时监测重要部位的安全情况,提供及时的灾难警告并帮助加速营救行动,开展地震灾情侦察和震后临时网络的搭建。无人机可以将物品运送到无法到达的地方,如在有毒气体渗透或者有核污染的情况下。另外,森林火灾和野生动物追踪方面,无人机可以代替人员快速检查大面积区域,且不会对人身造成危险。
无人机有各种尺寸,大型无人机可以单独使用来执行任务,如农业领域的植保无人机、快递公司正在开发的配送快递无人机等,小型则可用于编队或集群,而后者被证明在军用和民用方面具有极高的应用价值。正如Daniel 和Wietfeld 在文献[2]中所述,他们很可能会成为行动中的核心力量,如军用、警用、消防和安保等。此外,在电子和传感器技术的发展已扩大了无人机集群的应用范围[3],可作为交通监控、风能估计和遥感[4]等。
无人机编队或集群的应用前景广泛,但该领域还是一个相对较新的领域,之前进行的研究较少。为了有效利用无人机集群发挥作用,必须要建立稳定和可靠的特定用途的网络,其中有很多问题需要解决,路由协议就是其中之一。由于无人机高速运动的原因,现有的静态路由协议和车载路由协议都不适合当前的无人机自组织网络,需要提出新的路由协议。近些年,广大学者对基于地理位置的路由协议开展了广泛研究,在整个网络的性能上有了较大提升[5-7]。在基于位置的无人机自组织网络中的路由协议中,大多需要周期地从周边邻居获取他们的位置。由于为了网络开销的原因,获取周边邻居位置的周期不能设置得太短,衍生出了一个问题:获取周边邻居位置存在滞后性,必然会造成路由判断的失败,特别是在高速无人机自组织网络中,这个问题更加明显[8]。
针对上面提出的位置获取滞后问题,本文提出了一种基于无迹卡尔曼滤波(unscented Kalman filter)[9]实时预测周边邻居节点位置的算法,以增强无人机自组织网络路由转发时的成功率,提升无人机自组织网络的路由性能。本文完成的主要工作如下:(1)针对基于地理位置的无人机自组网路由协议获取邻居节点位置滞后的问题进行了广泛研究,讨论了现有解决策略的利弊,并做了横向对比;(2)提出了基于无迹卡尔曼滤波实时预测周边邻居节点位置的模型,详细叙述了相应的节点实时位置预测过程;(3)将位置预测应用在GPSR 路由协议上,在OPNET 中对改进的路由协议进行性能分析,相较GPSR 路由协议,性能有所提升,特别是在高速移动的无人机自组织网络中;(4)总线全文,提出未来研究的展望。
1 相关工作
在基于地理位置的自组织网络路由协议中,通过将数据包转发给靠近目标节点的邻居节点,以完成对数据包下一跳的转发。由于节点对其周边邻居节点地理位置的获取通过周期地接收所有邻居的广播信号而获得,而路由判断存在于任何时刻,在进行路由选择邻居节点的判断时,使用的是上一个周期获取的周边邻居的位置信息,而此时邻居可能已经运动到了本节点的通信范围之外,便会造成路由失败[10]。如图1 所示,在t1时刻,A 无人机节点获取了其邻居节点B、C 的地理位置;在t2时刻,A节点决定根据之前t1时刻获取的邻居位置情况,判断期望将数据包转发给B 节点,而此时节点B 已经运动到了A 节点的通信范围之外,造成路由失败。此问题在高速移动的无人机自组织网络中更加明显,会在很大程度上影响数据包转发的成功率,增加整个网络的点到点传递时间。

图1 周边邻居节点位置滞后
受限于技术研究的不深入和机载设备发展的不成熟,基于地理位置的路由协议刚提出时,通常忽略邻居节点位置获取滞后的问题,如贪婪位置转发路由协议(Greedy Geographic Forwarding,GGF)[11]和经典的周边无状态贪婪转发路由协议(Greedy Perimeter Stateless Routing,GPSR)[12]等。后来出现了一些基于GPSR 的改进型路由协议,如文献[13]通过运动节点之前的运动轨迹来预测下一时刻的邻居节点位置,但在高速运动和复杂任务的无人机组网中,此方法对位置的预测精确度还有限。还有一些路由协议[8,14]通过假设邻居节点在这段时间内进行匀速直线运动来对其位置进行预测,以缩小造成的位置预测误差。此种方案在一定程度上减小了位置判断的错误,但是模型估计还不够精确,因为所有节点必然不会按照直线进行匀速运动,所以在高速移动的自组织网络中还存在问题。
近年来,随着无人机机载设备的发展,大量机载测距设备得以小型化(DME、激光测距、激光雷达等),为无人机组网路由过程中获得邻居节点与本节点的实时距离提供了可能。为解决前文撰述的路由过程中邻居节点位置信息滞后的问题,本文提出了一种基于无迹卡尔曼滤波实时预测邻居节点位置的算法,在此基础上对GPSR 路由协议进行改进,并在OPNET 中进行了仿真验证,证实了此协议在性能上相较GPSR 有良好的提升。
2 基于周边节点位置实时预测的无人机自组网路由协议
本章提出了无人机自组网的网络模型,根据无迹卡尔曼理论在路由协议的邻居预测过程中建立状态方程。本文假设无人机一段时间内在三维空间内进行匀速直线运动,以此估算下一时刻的坐标,然后通过机载测距设备实时返回的距离信息,建设测量方程,通过无迹卡尔曼滤波的方法估算出邻居节点的当前最佳位置,最后将此方法应用到GPSR 路由协议中。
2.1 系统模型
本文研究无人机集群应用中无人机间的通信路由协议。无人机群中的每架无人机通过多跳转发来传递信息,整个无人机群网络没有中心,每架无人机均具备路由功能,无人机群中的任意一架或者多架无人机可与一个或者多个地面站进行通信,如图2 所示。每架无人机可以根据自身的全球定位系统(如GPS、北斗导航系统等)获取自身实时的三维位置信息。
假设无人机群的活动范围在(X,Y,Z)组成的三维空间内根据任务需要进行运动,在时刻t时空间范围内的无人机数量为n(t),t时刻对每架无人机进行编号,每架无人机的ID 为i,i∈[1,n(t)]。某无人机i在t时刻的位置表示为(xi(t),yi(t),zi(t))。为易于问题的研究,假设无人机的通信范围固定且为半径R的球体,记节点i与节点j之间的距离为dij(t),则节点i和节点j在时间t时刻能够满足通信距离的条件为:

其中dij(t)可由节点i和节点j在t时刻的位置坐标计算得到:


图2 自组织无人机模型
2.2 邻居位置实时预测的实现
本节详细叙述基于无迹卡尔曼滤波预测节点周边邻居实时位置的过程和方法,根据无人机自组织网络模型的特点,建立了相应的状态方程和测量方程。
2.2.1 状态方程和测量方程的建立
假定每架无人机上均装备有GPS 和惯性导航系统,系统能够协同测量出本机任意时刻的三维位置、三维航向和运动速度,则节点i在t时刻的状态矩阵表示为:

式中,hi(t)为节点i在t时刻的的水平运动航向,hi(t)∈[0,2π],ci(t)为本机在垂直方向的运动航向,ci(t)∈[0,π],vi(t)是当前的运动速度。
经过时间∆t后,假设无人机i这段时间内做匀速直线运动,则下一时刻的位置的状态方程可表示为:

系统假设在经过∆t后该无人机的运动方向和运动速度保持不变。测量方程则根据当前做出路由决策的无人机节点和当前需要转发包的无人机之间的距离来表示,则测量方程为:
式中,zji(t+∆t)为通过测距设备测量的时间t+∆t时刻,本无人机节点j和无人机节点i之间的距离。xj(t+∆t)、yj(t+∆t)、zj(t+∆t)为本无人机节点在t+∆t时刻的实时三维位置。
2.2.2 预测过程
计算sigma 点,根据系统的维度选取sigma 点的个数。若为N维,则选取2N+1 个点。本文中系统为6 维,则选取13 个点,中心点为均值。

2.2.3 计算权重值
计算权重值:

2.2.4 修正过程

通过上述方法,路由贪婪转发策略可以在获取邻居节点位置后的任一时间内获取到更加精确的周边邻居位置信息,以进行更加准确的路由转发。
本文在上述基础上对GPSR 协议进行改进,路由的转发策略依旧选取贪婪转发,遇到路由空洞时,采用GPSR 协议中的周边转发。为便于叙述,本文将改进的路由协议命名为GPSR-RLP(Greedy Perimeter Stateless Routing Protocol-based on Realtime Location Prediction of Surrounding Nodes)。
3 性能仿真及分析
本节将本文实现的GPSR-RLP 算法与现有表现良好的GPSR 相比,使用事件驱动的无线网络模拟器OPNET。对于考虑的场景,节点随机分布在2 000 m×2 000 m×2 000 m 的区域中。随机选择一个节点作为源节点将数据传输到目标节点,目标节点的坐标设置为(2 000,2 000,2 000),并且除了目标节点外的其余节点是中继节点。源节点发出周期性的数据包流。该仿真方案的参数见表1。

表1 仿真参数设置
性能仿真包括两方面:一是包到达比率,指目标节点收到的数据包总数占从源节点发送的数据包总数的比例,不包括冗余的数据包;二是点到点最大延迟,指数据包从源节点到达目的节点的最大延迟时间。
在接下来的仿真实验中,所有移动节点(包括源节点和中继节点)利用随机节点的移动性模型。在此移动性模型中,无人机节点从其原来的移动位置通过随机选择方向和速度,从当前位置移动到新的位置。在前文表1 中限制的范围内随机选择新位置的区域,而新的速度是从[0,最大速度]。当移动节点移至新选择的目的地,并以选定的速度移动节点暂停指定的时间,然后开始移动到另一个新位置,设置这个暂停时间为0。
3.1 不同节点数量的性能仿真评估
在这个仿真中,节点的最大移动速度设置为30 m/s,分别选取仿真区域内的节点数量为10、15、20、25、30、35、40、45、50 个时的性能比较。
图3、图4 分别仿真了不同节点数量时,包传输成功的比率和最大的点到点延时。从图3 可以看到,相较于GPSR 协议,提出的GPSR-RLP 协议在不同节点数量下有5%左右的性能提升。从图4 可以看出,相较于GPSR 协议,GPSR-RLP 协议在不同节点数量下最大的点到点延迟有220 ms 左右的提升,减小了最大的点到点延时。
3.2 不同节点移动速度的性能仿真评估
在这个仿真中,设置节点的数量为40 个,分别选取节点的最大移动速度为5 m/s、10 m/s、15 m/s、20 m/s、25 m/s、30 m/s、35 m/s、40 m/s、45 m/s、50 m/s 对路由协议的性能进行仿真评估。

图3 节点数量与包到达率
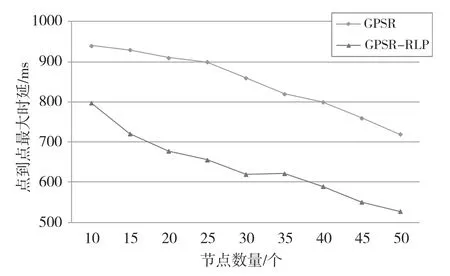
图4 节点数量与点到点的最大延迟
图5、图6 分别评估节点不同最大移动速度时,路由协议的包到达率和点到点的最大延时。从图5可以看出,随着节点速度的加快,提出的GPSRRLP 路由协议的性能开始凸显。当节点的最大移动速度设置为50 m/s 时,相较GPSR 协议,其包传输成功率提升了7%,且这个优势会随着节点移动速度增加而增加,进一步证明了解决周边邻居节点位置滞后的问题在高速无人机自组织网络中的重要性。从图6 可以看到,GPSR-RLP 协议相较于GPSR 协议,随着节点移动速度的加快,性能优势逐渐凸显。与图5 类似,在节点的最大移动速度为50 m/s 时,GPSR-RLP 的最大点到点延时减小了290 ms。

图5 节点的最大运动速度与包到达率

图6 节点的最大运动速度与点到点最大延迟
4 结语
无人机自组织网络路由协议最大的挑战之处在于动态的拓扑变化,特别是在高速移动的情况下,现有的车载自组织网络不再适用,必须提出新的路由协议,以适应高速动态的网络特性。本文提出一种预测邻居节点精确位置的路由协议——GPSRRLP。性能评估主要考虑网络传输的包到达率和最大点到点延时,结果相较GPSR 性能上有良好的提升,特别是在高速移动的动态网络状态下。后期可以考虑在硬件模块中直接实现对邻居实时位置的预测,以极大地减少无人机节点路由处理器的计算量。另外,对无人机状态方程的建模可以考虑进一步细化、精确,以进一步提高位置预测的精准性。
猜你喜欢
计算机与数字工程(2022年3期)2022-04-07
环球人物(2022年4期)2022-02-22
小资CHIC!ELEGANCE(2021年32期)2021-09-18
民用飞机设计与研究(2020年4期)2021-01-21
铁道通信信号(2020年8期)2020-02-06
网络安全和信息化(2019年11期)2019-11-25
科技与创新(2018年1期)2018-12-23
物联网技术(2018年8期)2018-12-06
电子制作(2017年24期)2017-02-02
小学阅读指南·高年级版(2014年2期)2014-05-27
