
30T有轨操作机驱动轮传动机构设计改造
2020-12-22 08:46杜真一韦朝强李兆凯魏太春史海博
设备管理与维修 2020年22期
杜真一,韦朝强,陈 波,郭 璞,李兆凯,魏太春,史海博
(西部超导材料科技股份有限公司,陕西西安 710018)
0 引言
操作机是锻造行业不可或缺的辅助设备。在锻造过程中,它与快锻机配套使用,通过实现多种动作完成坯料锻压的各种工序,减轻劳动强度,提高生产效率。西部超导材料科技股份有限公司45MN 快锻机配套的是30T 锻造操作机,属于摆移式全液压有轨锻造操作机。其结构由钳杆、机架、吊挂、润滑系统、液压系统、轨道销齿条机构、供电拖链、梯子走台和电气控制系统等组成[1]。可实现大车行走(前进/后退)、钳杆旋转(左旋/右旋)、钳杆平行升降、钳杆上下倾斜、钳口夹紧松开、钳杆左右侧移和钳杆左右侧摆7 种动作[1]。目前,因行走机构存在设计不合理之处,每月故障1~2 次,亟待改造。
1 故障现象
30T 操作机自投入使用,其行走机构多次出现故障。运行过程中,行走驱动轮与行走马达减速机配合处的双头螺柱易松脱,甚至剪切断裂,最终导致驱动轮脱落,严重影响操作机行走功能,且该处设计空间较为狭小,维修难度极大,耗时长,严重耽误生产。
2 原因分析
30T 操作机是通过行走液压马达及减速机驱动来实现车体驱动,该减速机通过螺栓连接固定在墙板外侧,行走驱动轮与减速机法兰通过双头螺柱进行固连,并与地面的齿销机构啮合传递驱动力。配合结构如图1 所示。
分析图1 可知,过渡法兰焊接于墙板上作为一个整体。装配时,首先将马达及减速机穿进墙板Φ270 mm 的孔中。其次,将马达及减速机右端法兰与过渡法兰贴合,通过4 个Φ20 mm 的圆锥销进行定位,并用16 个M20 的螺钉进行紧固。然后,将驱动轮通过20 个双头螺柱固定在马达及减速机的左端法兰上,并用双螺母锁紧。

图1 驱动轮装配
该机构连接方式存在一定弊端。30T 操作机总重约100 t,由4 个液压马达及减速机提供驱动力。在行走过程中,驱动力通过减速机法兰上的连接螺栓和销子传递至驱动轮,可见,该处螺栓及销子承受很大的剪切力,尤其是在操作机行走启停的一瞬间,需要克服自身惯性,此时瞬时动载荷极大,久而久之造成螺栓和销子断裂。加之,驱动轮受到振动影响,该处的连接螺栓经常松动,易脱落。因此,需要对该处机械结构的配合方式进行改造。
3 设计改造方案
分析可知,行走驱动轮故障是因为螺栓连接处为薄弱环节,仅仅加大螺栓规格的方法并不可行。①加大螺栓规格需在减速机法兰上扩孔,而该处空间有限,且法兰强度大大降低;②螺栓以承受轴向力为主,其承受横向剪切力的能力有限。因此,该方法不可取,改造方案需另辟蹊径。
通过技术讨论,决定将该处改造为花键配合的方式,因为键连接可承受很大的切向载荷且消除了配合间隙,防止频繁启停和振动导致的螺栓松动和断裂。具体方案如下:
(1)设计1 个花键法兰取代原过渡法兰(图2)。该法兰焊接于机架上,安装孔等尺寸不变,但在其圆周上加工有4 个扇形键,用于配合传递驱动力。且花键法兰的材料由原来的Q235-A 改为Q345-B 的锻件,该材质具有良好的塑性和焊接性能,多用于承受较大动载荷的场合[2]。同时,要求对该锻件进行调质处理,提高零件强度,从而使花键法兰具有良好的综合力学性能。
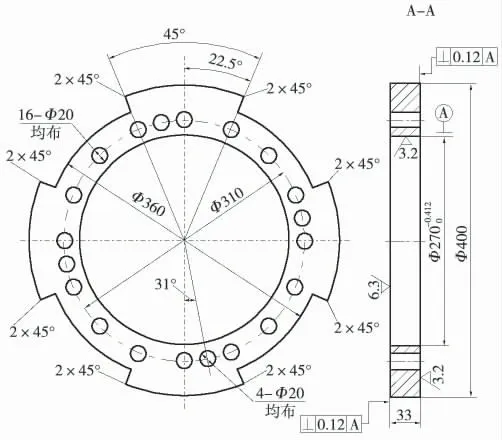
图2 花键法兰
(2)设计1 个花键套,结构尺寸如图3 所示。花键套的内孔与减速机法兰外圆配合,并将其焊接为一体。该零件材料选用Q345-B 的锻件,加工技术要求与花键法兰相同,具备良好的焊接性和综合力学性能。经加工制造、热处理,将花键套固定在减速机上(图4)。

图3 花键套
(3)对驱动轮机构进行装配。由图4 可知,花键套的环形端面加工有4 个扇形凸台,装配时凸台与花键法兰的凹槽配合,花键法兰的扇形键与花键套的凹槽配合,从而实现了通过键配合传递驱动力,承受动载荷的方法(图5)。

图4 花键套固定

图5 装配效果

图6 改造后效果
使用该套装置后,螺栓仅起到端面紧固作用,不再承受剪切力。此外,将固定驱动的双头螺柱改为内六角螺钉,便于拆装。最后,用细钢筋焊接在相邻两个螺钉头之间,并在驱动轮和减速机之间焊接防松块,起到良好的防松作用。
4 技改成效
目前,已使用该方案对30T 操作机的3 个行走驱动轮进行了技术改造,如图6 所示。自改造至今使用多年,未再发生过螺栓松动断裂,驱动轮脱落的现象,使用效果显著。
猜你喜欢
工程建设与设计(2022年15期)2022-08-24
汽车工艺师(2021年12期)2021-12-22
阅读与作文(小学高年级版)(2021年12期)2021-02-14
装备制造技术(2020年1期)2020-12-25
阅读与作文(小学高年级版)(2019年12期)2019-12-26
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2018年11期)2018-11-23
小学生导刊(高年级)(2016年4期)2016-04-08
制造技术与机床(2015年10期)2015-04-09
郑州大学学报(理学版)(2014年4期)2014-03-01
