
车路协同下基于行车指引的改进STCA双车道换道模型
2020-12-22 08:52马文哲赵征凡张凯兵王晓华
东南大学学报(自然科学版) 2020年6期
李 珣 马文哲 赵征凡 张凯兵 王晓华
(1 西安工程大学电子信息学院,西安 710048)(2 Bernoulli Institute Faculty of Science and Engineering, University of Groningen, Groningen 9747AG, Netherlands)(3工业和信息化部电子第五研究所,广州 510610)
双向四车道道路是我国城镇最常见交通基础设施,为保证道路交通流通畅,当前做法以路况实时播报、交通口信号灯配时诱导等为主.由于人类前向观察驾驶习惯和易受精神状态的影响,借助现有手段提升路段使用效率十分有限.智能交通系统(ITS)和5G的出现为车路协同中道路与车辆状态的信息交互提供了条件[1].因此,在未来信息交互条件下如何有序指引车辆运行、提高交通安全与道路使用效率值得进行研究[2],而在车路协同条件下构造适合特征路段的交通流模型是首先需要解决的问题[3].
目前,交通流模型主要分为宏观和微观交通流模型[4],其中描述微观交通现象如车辆的跟随、超车、换道等的模型称为微观交通流模型.在新技术环境下,换道模型对于微观交通流的影响是智能交通控制方向的研究重点之一,受到国内外学者的关注.Lee等[5]提出的多车道SOVM有效解决了加减速区车辆速度不可预测波动问题.Lombard等[6]提出了一种基于在线优化算法动态调整参数的协同换道模型,让车辆更具有调整自身行为的能力.Li等[7]建立联通自动车辆(CAVs)变道协同轨迹规划模型,解决了车辆分组与运动规划2个关键问题.上述研究均是通过现有技术手段达到车路互通的效果.但由于上述模型较为复杂,普适性不好,而简单的元胞自动机模型能够离散化处理时间、空间、状态,因此该模型成为我们研究的重点.
元胞自动机模型是研究微观交通流的一种经典模型,能够用简单模型描述复杂微观交通对象间的关系,精确反映微观交通流的特性.针对双车道交通环境,Chowdhury等[8]提出了经典的STCA模型,引入了双车道换道规则.王永明等[9]在该模型基础上提出STCA-I模型,引入风险度并提出一种弹性安全换道距离的概念;徐洪学等[10]提出X-STCA模型,该模型是针对这种安全换道距离规则的进一步完善;李珣等[11]则在前期对STCA-I模型进行多车道扩展,提出一种基于车路协同环境的多车道换道策略,在保证安全换道的同时,利用协同换道规则增加了道路的交通流量,提高换道频率和道路使用效率;熊胜辉等[12]根据典型周期边界条件及双车道交叉口效应进一步提出并行动态更新规则;张存保等[13]同样针对双车道交叉口协同控制问题建立微观交通流模型;Laarej等[14]利用能量消散和满意度代表车辆在行驶过程中受到其他车辆阻碍时的状态,对双车道混合交通流特征进行研究.但上述研究大多并不依附于车路协同条件,且根据人为驾驶的前向特征进行模型构建.
随着ITS和智能车辆设备发展,车辆运行决策过程可以增加周边车辆运行信息[15],如沃尔沃City Safety安全系统能在车辆换道时提供侧、后方车辆的威胁警告.面向未来车路协同交通环境,本文基于元胞自动机模型在改进NS模型基础上提出双车道换道模型,分析车辆局部的行车威胁构造行车指引函数,依据行车指引更新车辆位置与速度,对STCA-S模型进行改进,建立车路协同条件下带换道指引的双车道换道模型并进行数值模拟,将模拟结果与STCA、STCA-I、STCA-S模型及混合双车道交通流模型[14]中快速车辆(FV)模型和慢速车辆(SV)模型在不同车辆密度下的车速、流量进行对比,并对换道频率以及诱导车速遵守率进行分析.
1 双车道及STCA-I模型
1.1 基于元胞表达的双车道模型
为单纯讨论微观交通对象即车辆之间影响与换道规则之间的关系,根据城市双车道道路环境大多非主干道、存在交叉口、受信号灯控制等特点,本文限定所研究双车道为无外界控制信号或存在汇入、汇出道路形式的路段.按照元胞自动机建模范例[16],将目标道路分成并列2行若干个等长度的小格子,每小格代表一个元胞;定义右下角序号为当前占据该位置的车辆编号,其中i表示车道标号,j表示在第i个车道的第j个车辆,元胞方格右下角数字为该格中车辆速度,则每个元胞在t时刻的状态为空置或被占据,如图1所示.
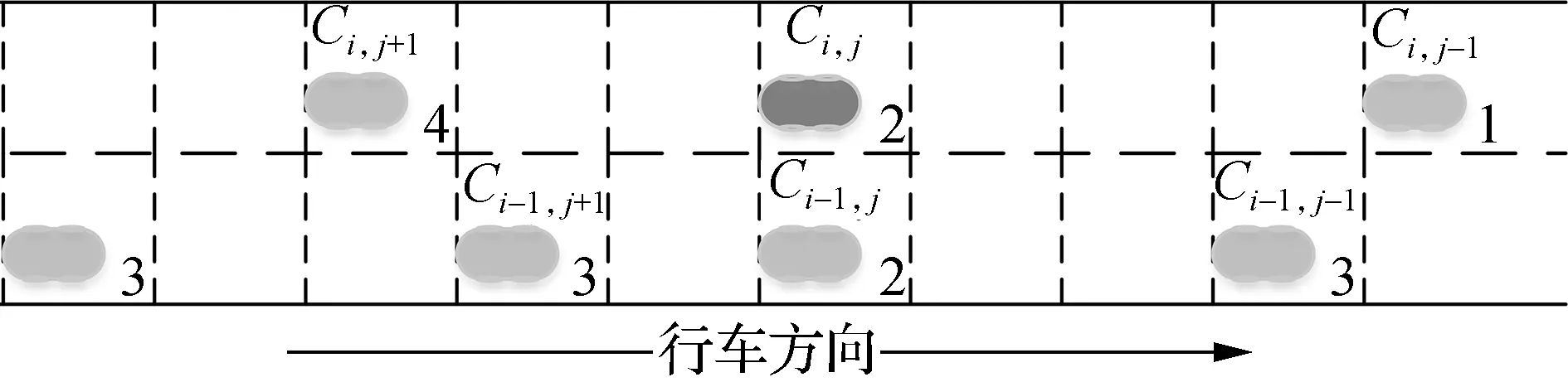
图1 双车道车辆位置、速度示意图
1.2 双车道车辆关系描述
双车道车辆在运行过程中,受前、后、左/右邻近车辆的干扰,因此,以图1中车辆Ci,j在t时刻的位置作为参考点,双车道车辆关系表达如下:
1)Li表示第i个车道,双车道道路中可简化i=[1, 2]表示车辆行进方向的左道、右道.
2)Ci,j-1、Ci,j+1分别表示i车道车辆Ci,j的前、后车辆,对应速度与位置使用相同角标,即(vi,j-1(t),xi,j-1(t))、(vi,j+1(t),xi,j+1(t)).
3)Cic,j表示车辆将在下一时刻进行换道,对应的预换道位置表示为xic,j(t),即t时刻i车道的第j个车辆将要更换车道.
4) 当t时刻存在预换道车辆Cic,j,则该车辆换道后的前、后车辆表示为Cic,j-1、Cic,j+1,对应位置与速度可表示为(vic,j-1(t),xic,j-1(t))、(vic,j+1(t),xic,j+1(t)).
(1)
式中,rmax为最大减速度.当后车速度大于前车时,安全距离与前、后车速度以及最大减速度rmax相关,设t时刻第i车道第j个车的加速度为ai,j(t),减速度为ri,j(t).
1.3 基于协同换道的STCA-I模型
STCA模型设定安全距离dsafe=vmax.针对该设定过于保守和苛刻的问题,为更好地模拟车辆实际存在的高速换道可能,STCA-I换道规则较STCA规则将邻道车辆与将要换道车辆之间的相互影响以风险度dδ进行表达,即
min{vic,j+1(t)+1,vmax}+dδ
(2)
(3)
STCA-I模型缩小了邻道后车对换道后车辆的影响,保留较小制动安全距离基础上,以邻道后车速度作为换道车辆的安全换道条件,在保证安全的前提下,提高车辆的换道灵活性.但该规则以人类驾驶车辆前向视觉特点构建换道模型,因此未能进行单个车辆动态区域信息的综合优化,难以适应已经存在的道路车辆动态信息实时交互的现代技术.
2 基于行车指引的改进STCA模型
如存在车辆运行诱导信息,机动车行驶过程中,能够摆脱前向视野的约束,根据周围车辆信息对自身车辆所受威胁进行实时有效评价,还能够根据道路远端车辆运行状态对本车状态进行控制,然后进行换道决策.因此,双车道车辆换道指引过程分为2个部分:基于局部车辆威胁度评价的换道指引、换道车辆的车速指引.
2.1 威胁度评价的换道指引
车辆人为驾驶的换道过程为:受前车阻碍、后视镜判断后车距离、打开转向灯转向.如果在车路协同条件下,依旧按照这样的流程,将无法有效提高道路的使用效率,从而改善局部区域的交通流状况,因此本文提出了一种较为全面考察周边车辆状态的换道指引.构造指引模型如下.
1) 分析车辆换道需求.仍以Ci,j为观察车进行说明,即在下一个迭代步长中存在前车阻挡Ci,j或Ci,j阻挡后车的情况时,该车有换道需求,加入了影响后车行驶的判断,满足如下改进后需求表达式,则向邻近车道Lic换道,即Li→Lic:
(4)
STCA-I模型忽略了后车和前向不可视路况信息,没有形成局部交通环境的全局运行环境评价,因此本文根据1.1节双车道环境模型进行威胁度评价函数的构造.
2) 构造威胁评价函数.假设在车路协同条件下t+1时刻Ci,j周边车辆空间运动状态可知,表达为si,j(t),则可构造对应Ci,j的下一迭代步的车辆空间状态矩阵如下:

(5)
则t时刻计算获得存在t+1时刻对于车辆Ci,j威胁度评价Ti,j(t+1),即
Ti,j(t+1)=
(6)
2.2 基于换道指引的车速诱导
(vic,j-1(t+1)+ai),vmax}
(7)
即观察车的车速与换道后的前车下一时刻加速趋势相关联,达到同步加速的效果.
(vic,j+1(t+1)+ai),vmax)}
(8)
即观察车在车路协同条件下同样可以做到与后车加速趋势相关联.
当车辆密度高于临界值后,道路阻塞点的产生不可避免,即使在自由流密度的状况下,阻塞点依然可能产生(幽灵现象),并后向传播,造成车辆走走停停的状态.如果能够对前往阻塞点位置的车辆给予早期的速度指导,线性的减速和加速过程将使得道路的畅通以及车辆的燃油经济性和环保均有所改善.因此在车路协同条件下,本文加入基于临近阻塞点的车速调节规则.
借鉴文献[17]中搜索阻塞点的方法,若满足如下条件,且阻塞车辆数m≥3,则判定该处存在阻塞点(jam),并设置阻塞点中最后的车辆处为阻塞点参考位置xi,jam_j(t):
0∩vi,j(t)=vi,j-1(t)=…=vi,j-m(t)
(9)
统计阻塞点包含的车辆数m,按照符合实际情况的慢启动原则,处于阻塞点位置的首车的启动速度以及阻塞点内的启动速度均应为一个元胞距离,阻塞点消散时间tjam为m-1个仿真步长,所以对应未到达阻塞点的后续车辆,给予的诱导车速值由下式计算获得:
(10)

(11)
3 STCA-M模型更新规则
在车路协同条件下通过式(4)~(11)能够将车辆速度的变化与本道、邻道的前车、后车速度以及前方道路的拥堵状况相关联,目标是减少道路中走走停停的车辆状态,提高路段中的同步相.与NS-S模型采用同样的更新规则,本文带诱导指引的改进STCA模型简称STCA-M(STCA for multi-vehicle),其更新规则如下:
1) 基于威胁评价的换道规则
(12)
2) 基于诱导车速的加速规则
(13)
3) 基于临近阻塞点的减速规则
(14)
4) 随机慢化
vi,j(t+1)=
(15)
式中,pc为诱导车速的遵守率;Ri,j(t)为车辆Ci,j随机慢化迭代产生随机数,取值[0,1].
5) 位置更新
xi,j(t+1)=xi,j(t)+vi,j(t+1)
(16)
4 数值模拟及分析
在车路协同条件假设下,可交互的车辆运动基本信息至少包括速度、加速度以及局部堵塞点信息,车辆模型以7座及以下I型车为主,根据实际车辆运动特征,对模拟数据进行以下初始化:车辆外形,长lc≤5 cm,宽bc≤5 cm;加速加速度aacc∈[0.4g,0.8g];减速加速度adec∈[-1.2g,-0.8g],g=9.8 m/s2.同时,假设信息交互频率为1 Hz,设定元胞格表征5 m的道路长度,按照本文动态安全距离函数,车辆加减速度信息更新频率时间内,位置变化范围xi(t+1)-xi(t)在加速过程中为[2,4]m,减速过程中为[4,5]m,即在极端加速度变化下,车辆对应位置变化不大于一个元胞格;车辆密度ρ=n/l,n为仿真车道长度为l的道路中车辆数;仿真道路长度l=2 km,由400个格点组成;最大车速选取vmax=4格/s=72 km/h;模拟时间为1×104个仿真步长,初始车速按照0~vmax随机分布于道路中;为减少初始分布的影响,模拟结果的数据统计范围为0.5×104~1×104步长.
4.1 速度与流量
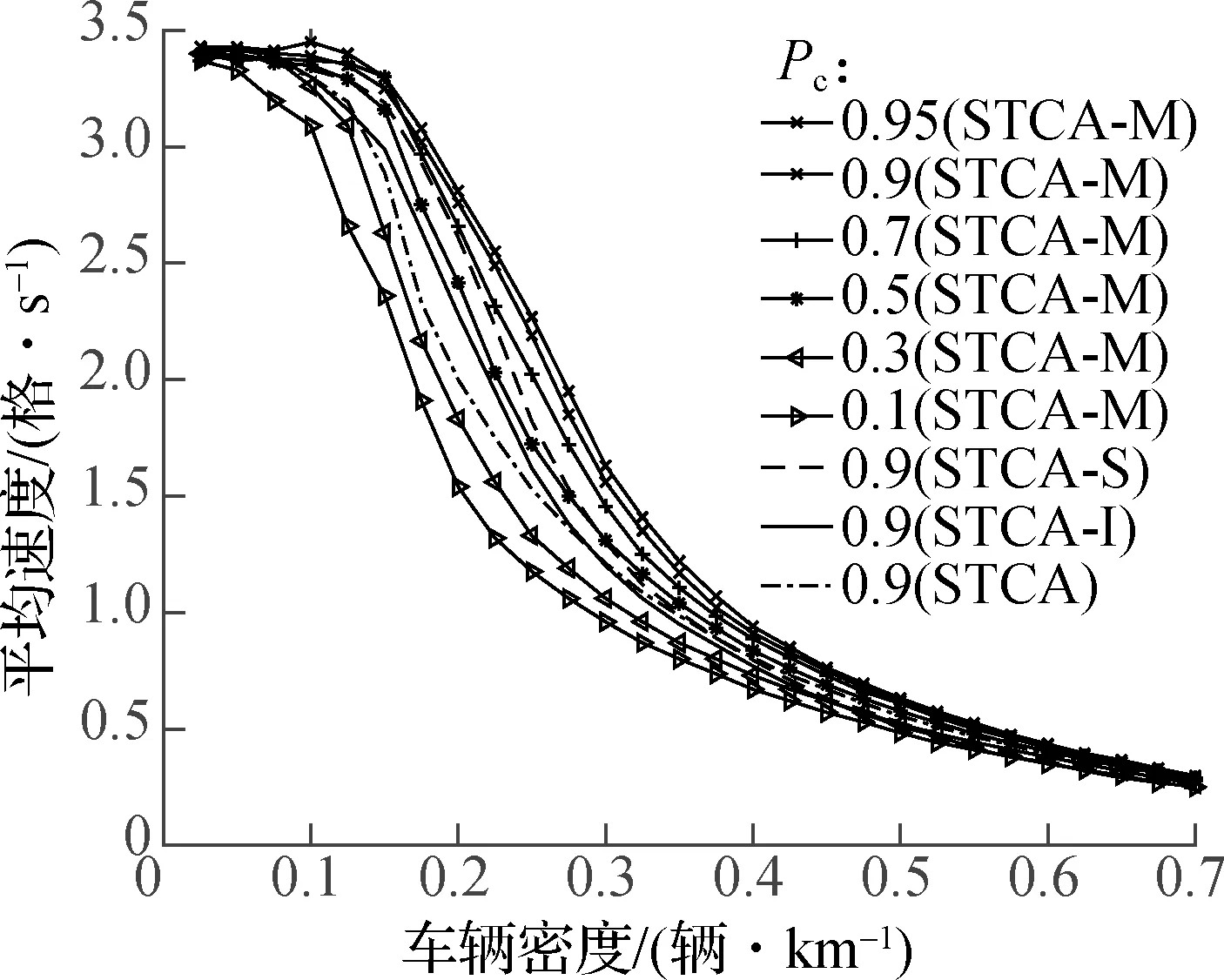
本文分别对FV、SV、STCA、STCA-I、STCA-S、STCA-M模型进行了复现,对数值模拟结果中不同车辆密度下平均速度、平均流量等基本指标进行对比,如图2所示.
由图2(a)可知,车辆密度极低(约为[0, 0.075]辆/km)路况中,车辆处于自由行驶阶段,无需换道保持车速或有充足的安全换道间距,因此6种模型下微观对象的车辆速度基本相同.当车辆密度增加,趋于0.1 辆/km时,除FV模型外,其他5种模型均保持稳定下降趋势,而FV模型呈现出较为迅速的下降趋势,然后上升.这是因为人类的驾驶反应时间和制动习惯会导致车辆过量制动,然后加速跟随,频繁启停造成平均速度和流量变化的非线性.STCA类模型调节机制的核心是通过前车判断后车状态,在非车路协同条件下忽略了FV模型中人类驾驶受激反应.同时SV模型的平均速度与STCA-I、STCA模型相似甚至更优,分析可知STCA与STCA-I模型中的定值安全距离以及较严苛的换道要求造成车辆需减速等待换道,因此出现平均速度明显下降,而SV模型模拟人类驾驶习惯,较慢的速度能够留给驾驶员更多判断时间和更准确的前车速度准确认知,从而避免了紧急启停情况的发生.STCA-M模型的临近阻塞点诱导车速可以提供驾驶人行车速度的指引,因此能够获得较SV模型更好的交通流数据.在车辆密度区间[0.1, 0.325] 辆/km,6种模型平均速度的变化趋势基本相同,但对应相同密度值,STCA-M模型能够获得更高的平均速度值.这是因为在保证安全换道的基础上,STCA-M模型针对双车道环境提供了最为灵活的换道规则,使得车辆能够通过可能的换道保持车辆的速度.当车辆密度进一步增加,超过0.2 辆/km时,多数车辆虽然能保持同步,但较多启停现象和换道成功率降低导致平均速度下降斜率开始增大,STCA和STCA-I模型定值安全距离和换道条件苛刻的弊端造成其在此密度区间平均速度较低,甚至劣于SV模型.STCA-M模型在假设条件下拥有较好的速度与换道指引,可提前获得适应当前交通环境的建议速度,提升安全换道的可能性,在此密度区间获得最优的平均速度,保证较好的同步流.当车辆密度超过0.4 辆/km后,不同模型对应的平均速度值均呈现相同的下降趋势,STCA-M模型并不能获得更加明显的速度保持,这表明通过协同控制手段调节路段车流有效但效果有限,路段车辆绝对数的增大会导致控制方式失效.
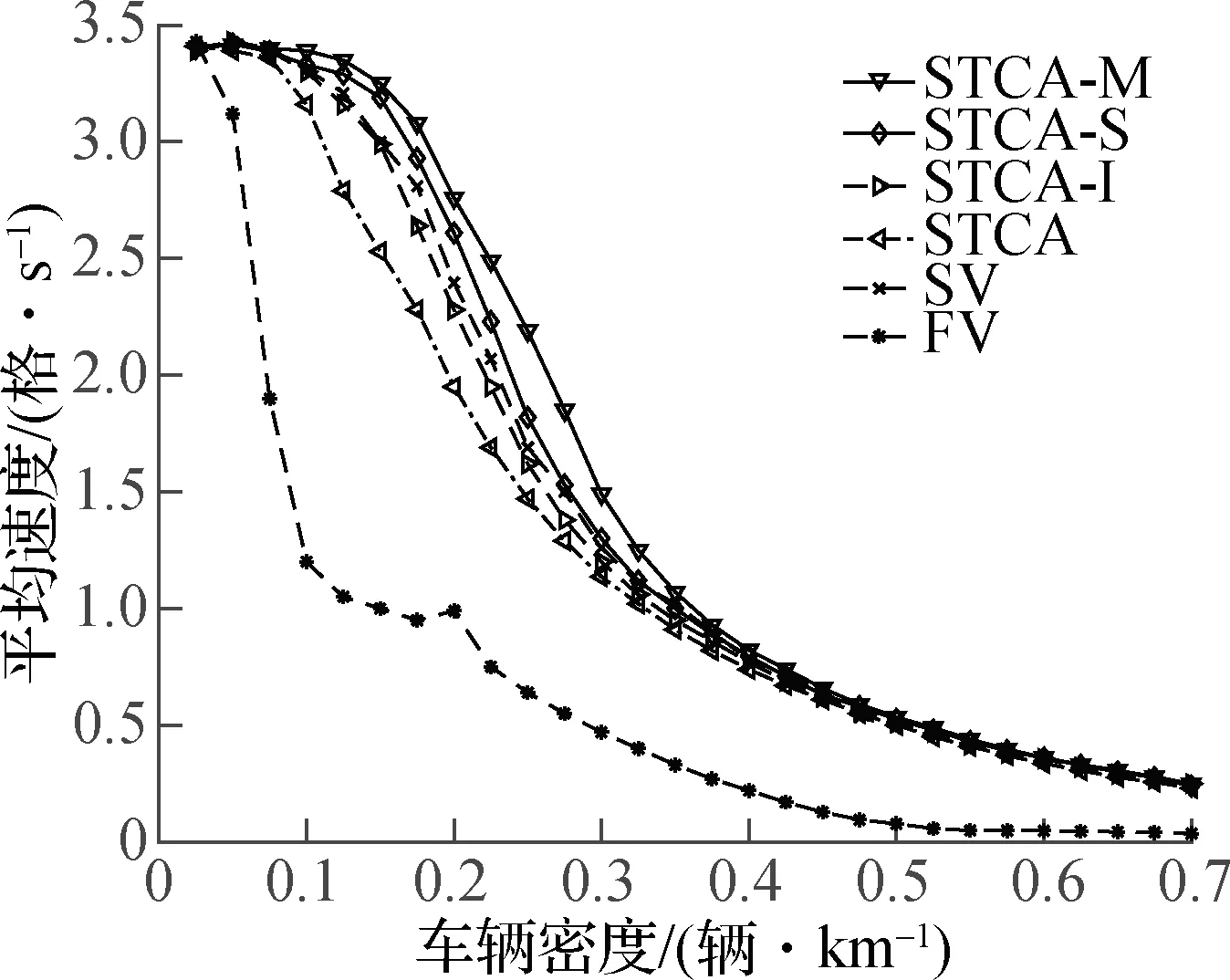
(a) 双车道速度基本图
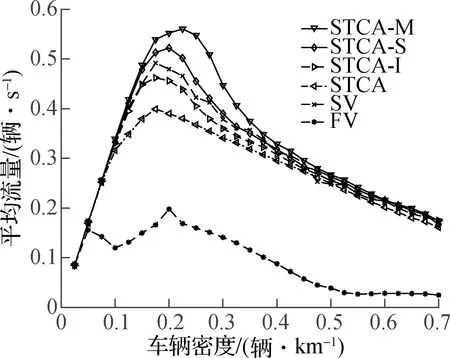
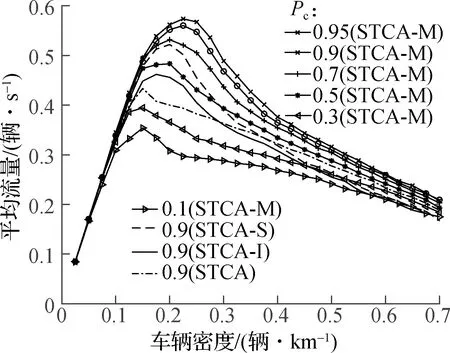
(b) 双车道流量基本图
在图2(b)中,随车辆平均速度变化,由于车辆绝对数在车辆密度区间[0, 0.1] 辆/km相似,因此6个模型的平均流量基本相同,即在自由流的条件下无需换道或均能顺利换道,FV模型出现的平均流量降低与其驾驶员受激反应相关.但随着车辆密度的进一步增大,换道需求明显增加,能否有效换道直接影响平均流量数值.因此当车辆密度为0.175 辆/km时,STCA模型平均流量达到最大值,STCA-I模型由于提供了更多的换道,平均流量最大值优于STCA模型.但明显固化的换道规则影响交通流在此密度下的提升,SV模型中驾驶员更加灵活的换道方式使得SV模型在当前车辆密度条件下较上述2个模型平均流量最大值较高.同时,虽然STCA-S模型能够通过更加灵活的换道规则进一步提升平均流量,但仍在车辆密度0.2 辆/km时出现拐点,此时FV模型的平均流量也达到最大,但其最大值平均流量绝对值最小,侧面反映激进的驾驶方式、逼仄的观察空间和短暂的判断时间会降低换道与道路的使用效率.而STCA-M模型协同换道方式通过挖掘换道可能,保持相对高的车辆密度下的车辆速度,进而获得较好的平均流量.STCA-M模型虽然也在约0.225 辆/km密度位置达到最大值,但在密度区间[0.15, 0.275] 辆/km,通过有效的协同换道,能够在较大的密度区间获得车速的保持,提高路段车辆特别是高速车辆的容量,从而提高了路段的使用效率.
为更加精确表征模型之间的差别,对[0.05,0.50] 辆/km区间数据进行了对比,如表1所示.车辆速度值随车辆密度值的增加而减少,平均流量值随密度值的增加迅速增加,达到最大值后,由陡向缓地减少,符合交通流3要素的基本规律.通过分析6种模型的具体数据发现,流量最大值在[0.175,0.225]辆/s范围内,SV、STCA与STCA-I模型平均流量最大值位于车辆密度值0.175 辆/km处,分别为0.492、0.399、0.462辆/s,与文献[7,14]的数值模拟结果一致.STCA-I模型的动态安全距离在STCA模型定值安全距离基础上更加真实体现了车辆换道规律,平均流量较STCA模型有了较大的提高,而SV模型反映了同步流中驾驶员更为多变的个人换道习惯,因此处于2种模型之间.FV与STCA-S模型车辆密度在0.200 辆/km时达到平均流量最大值,为0.198、0.522辆/s,但FV模型平均流量最大值远低于STCA-S模型,这说明协同换道方式能够通过提高安全换道的频率提升道路使用率.STCA-M模型的平均流量最大值出现在车辆密度0.225 辆/km左右,为0.560辆/s,较STCA-I模型平均流量最大值提高约21.21%,较STCA-S模型提高约7.28%,较SV模型提高约13.82%.相比STCA、STCA-I、STCA-S、FV、SV这5种模型,STCA-M模型通过协同换道、动态安全距离的引入,有效地提高了平均流量,增加了道路容量.这对于缓解未来汽车保有量逐渐增长对城市道路造成的压力是一种十分有效的方式.
4.2 时空图分析
根据图2(b)中STCA、SCTA-I、STCA-S、STCA-M模型的基本流量图曲线,取平均流量差别较大位置的车辆密度0.2 辆/km,分别对双车道的左道(L1)和右道(L2)进行时空图绘制,如图3所示.图3(a)、(b)、(c)、(d)分别对应车道L1在4种模型中的时空图;图3(e)、(f)、(g)、(h)分别对应车道L2在4种模型中的时空图.
结合图2(b)、图3可知,在车辆密度0.2 辆/km时,STCA与STCA-I模型的平均流量值并非其模型的最大值.观察对应时空图可知,STCA-I模型虽然斑块少于STCA模型,但仍因为上述2种模型均为被动换道,缺少主动换道指引,时空图中堵塞斑块消散较慢.同样的车辆密度条件下,STCA-S与STCA-M模型均引入了主动换道指引和速度指引.观察其时空图,可以发现出现的堵塞斑块较少,且较STCA、STCA-I模型能够很快获得消散,特别是STCA-M模型斑块的数量与消散速度均优于STCA-S模型.这是因为STCA-M模型对换道行为设置了更加合理化的威胁度评价,减少驾驶人对安全距离主观臆断,使得换道成功率上升.同时引入基于堵塞点的车速指引能够在主动指引条件下使得车辆的道路行驶具备预测性,同步车速情况变多,进一步减少了阻塞点消散时间,从而减少了上游车辆因阻塞点而产生的减速、启停行为.因此在车路协同信息交互的条件下,对换道车辆速度进行有效的指引可以改变车辆运行的方式,保证道路的使用效率和方式的改善.
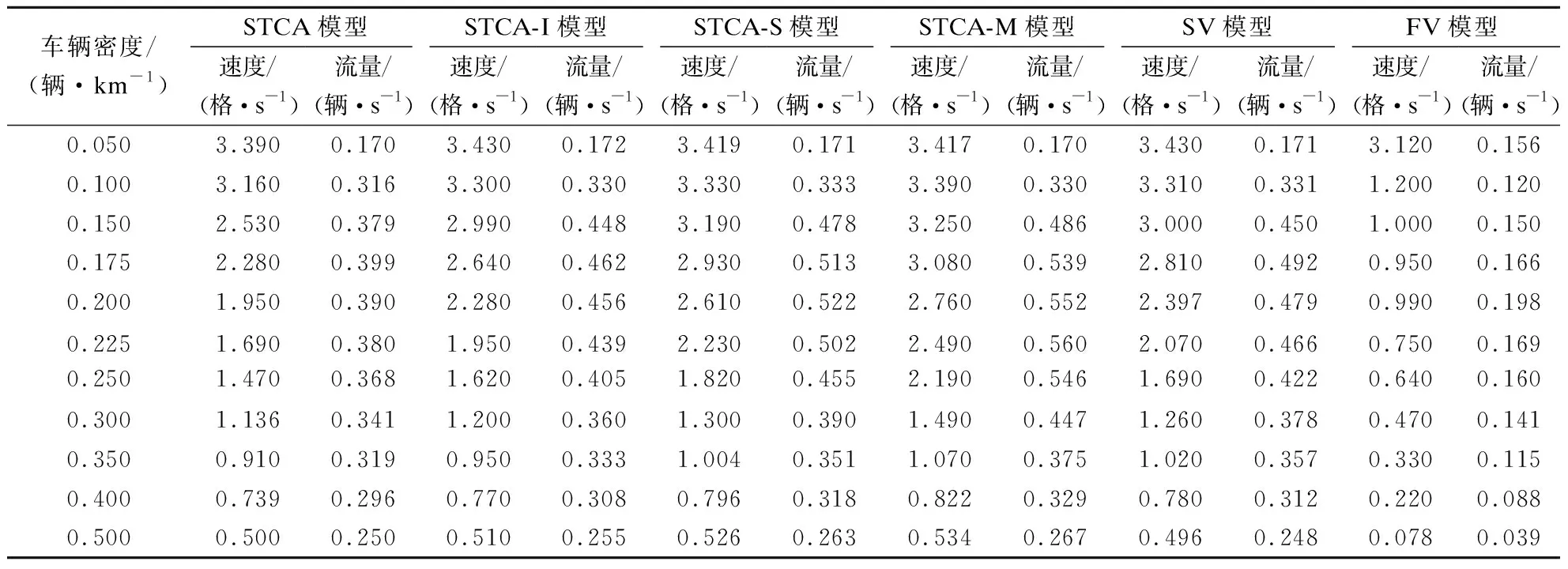
表1 双车道平均速度、流量、车辆密度数据对比
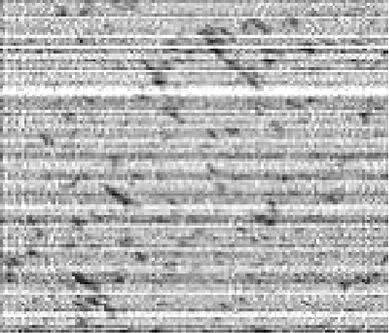
(a) STCA,L1
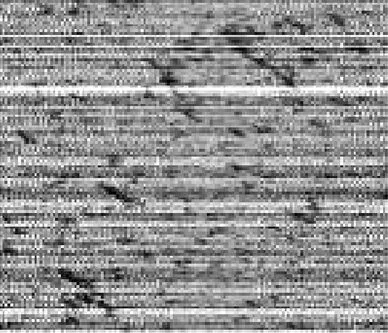
(e) STCA,L2
4.3 车辆密度与换道频率
STCA、SCTA-I、STCA-S、STCA-M 四种模型不同车辆密度条件下发生的换道频率结果如图4所示.将4种模型的换道频率进行对比可得,在极低车辆密度区间([0, 0.1] 辆/km),由于车辆密度低、自由空间较大,车辆换道需求较小,车辆均可以按照自身速度调整行驶,即便出现换道需求,换道时的安全距离足以使车辆安全换道.因此在极低车辆密度区间,4种模型无太大区别.随车辆密度的进一步增加,换道情况逐渐产生差别,当车辆密度达到[0.1, 0.3] 辆/km范围内时,由于车辆密度增加,开始出现受阻车辆,车辆的换道需求也逐渐增多,换道频率涨幅较大,STCA-M模型的换道规则灵活,因此换道频率上升趋势最快.当车辆密度达到0.4 辆/km,特别是大于0.5 辆/km之后,由于道路空间的压缩,换道频率减小,除STCA模型外,其余3种模型换道趋势和换道频率数值差别较小.
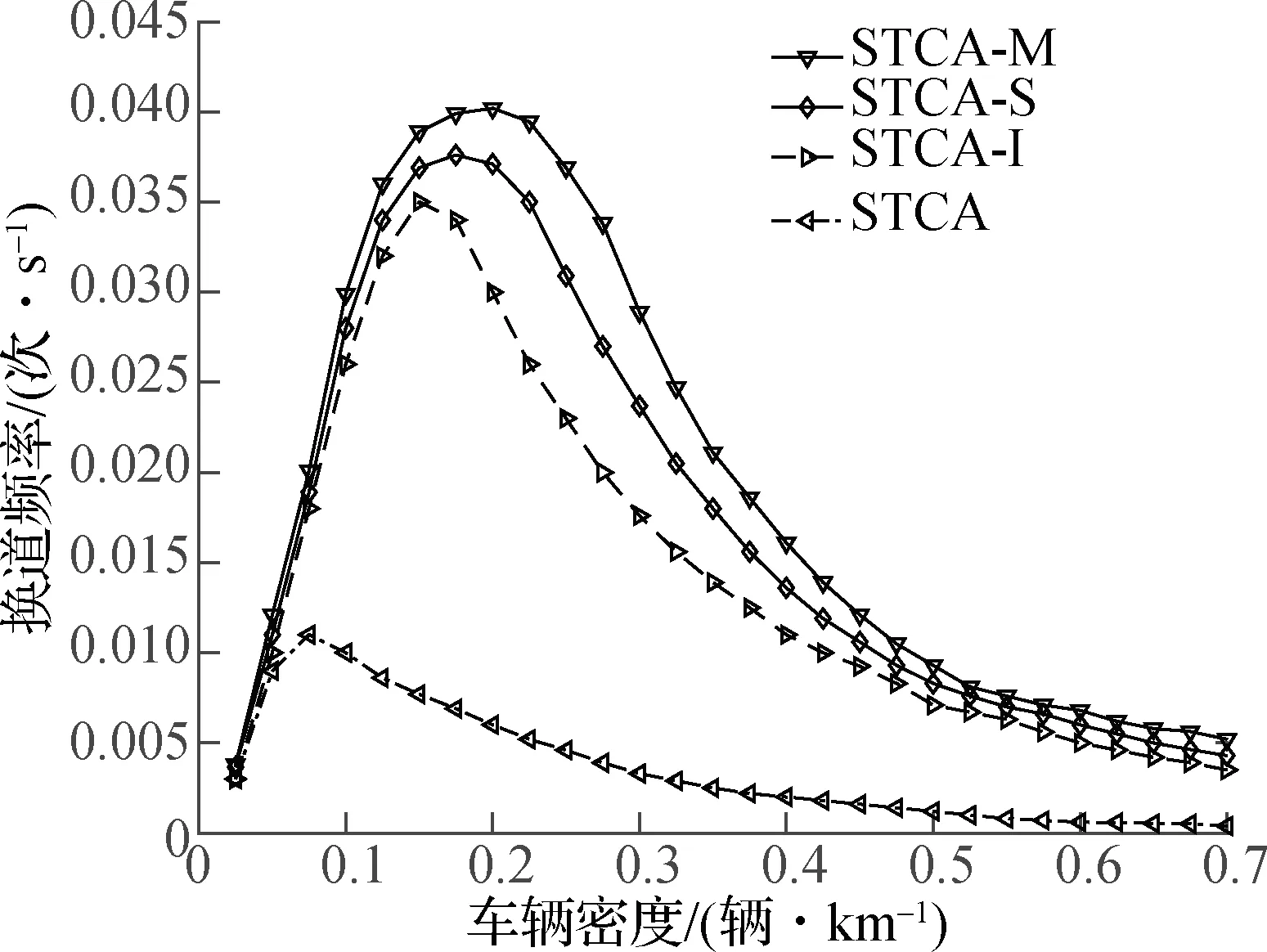
图4 4种模型双车道换道频率对比图
STCA、STCA-I、STCA-S、STCA-M 四种模型在不同车辆密度下对应的换道频率如表2所示.通过对比数据可以发现,各个模型的换道频率最值对应的车辆密度与平均流量对应值相同,造成STCA模型换道频率在车辆密度达到0.075 辆/km后明显较低的原因在于其过于苛刻的车辆间距要求;STCA模型对应的换道频率趋势与STCA-S、STCA-M模型一致,但其仅表征了当前交通环境下的实际换道频率;STCA-S模型引入了车路协同,因此在一定程度上提高了换道频率,STCA-M模型则根据周边车辆威胁结合拥塞路段信息,尽可能地提供了车辆安全换道条件,因此换道频率对应STCA-I和STCA-S模型的最大换道频率分别增长约14.86%和6.91%.上述分析说明,本文提出的基于行动指引的换道模型能够进一步挖掘车辆换道可能、提高道路使用效率.
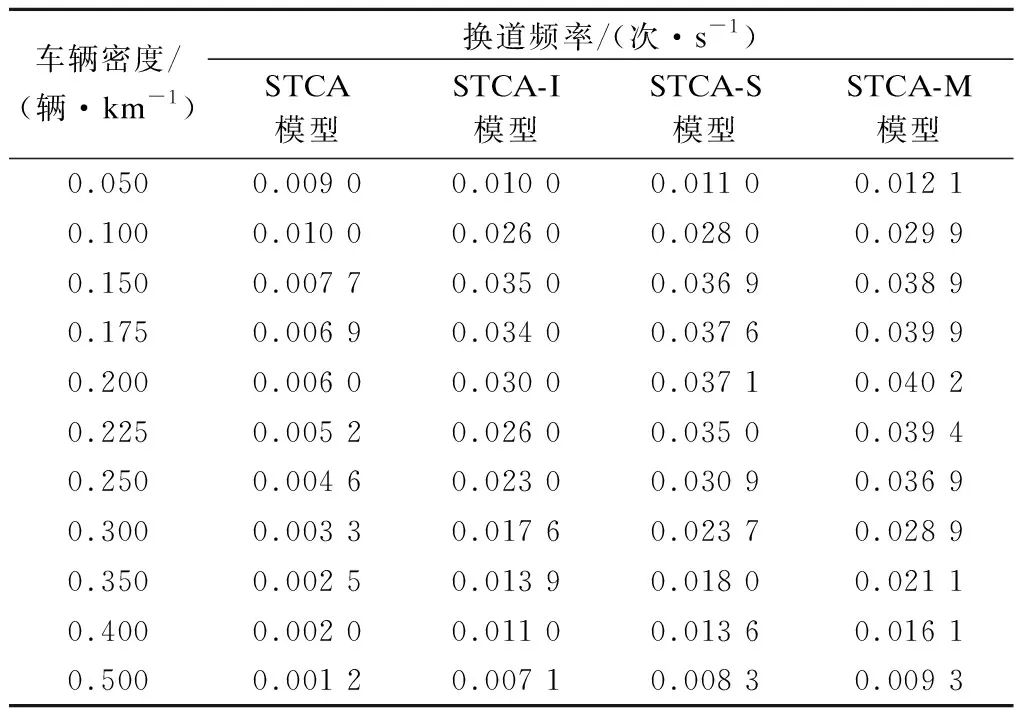
表2 双车道模型换道频率对比
4.4 诱导车速遵守率分析
基于当前导航软件的使用情况,可以预见,在车路协同信息共享初期,车辆运行指引也将依靠驾驶员来完成,所以需要对不同遵守率下模型有效性进行讨论.本文根据不同的遵守情况对平均速度、流量与车辆密度关系进行了分析.取换道指引车速遵守率pc=0.1, 0.3, 0.5, 0.7, 0.9, 0.95,其中设定完全遵守率为0.95的原因是考虑到实际道路中依然有故障车辆的存在,假设仍有0.05的驾驶人不遵守设定规则.图5为在不同车辆密度下不同遵守率获得的平均车速和平均流量对比.
(a) 速度基本图
(b) 流量基本图
从图5可以明显看出,当pc=0.95时,所有车辆均可以按照指引进行换道和车速的控制,则可以获得最优的平均流量.参照表3,车辆密度为0.225 辆/km时平均流量达到最大值0.574辆/s,当遵守率下降,则对应平均流量值一同下降,当pc<0.7时,STCA-M模型的最大平均流量对应的车辆密度值与STCA-S模型相同,且对应道路流量变化趋势相似;当pc<0.6时,STCA-M模型对于道路流量的提升能力则小于STCA-S模型;当pc=0.45时,与STCA-I模型的最大平均流量相同,pc<0.3时则不能体现出STCA-M模型的换道优势,甚至由于过于自由的车辆控制方式,道路的利用效果变差.
同时,分析图5(b)和表3可知,车辆密度大于0.5 辆/km的区间,STCA-M模型的遵守率变化并未导致高车辆密度路况下的平均流量有较大变化.这是因为在阻塞流为主的道路中,能够提供给车辆自由选择的控制方式变少,即从客观条件上要求车辆遵守换道规则.因此在高车辆密度环境中,本文STCA-M模型在平均流量数值上能够获得略微优势.通过上述分析可知,STCA-M模型能够在各种遵守率情况下更好地疏导交通流,该模型较其他3种模型更适用于未来城市车路协同道路.
5 结论
1) 根据车路协同能够提供的车辆、道路可交互信息内容,通过对双车道环境下车辆运行状态、相互影响关系的分析提出了一种基于行车指引的改进STCA双车道换道模型.首先对行驶车辆的局部区域受扰情况进行了换道指引和速度诱导函数的建立,结合NS-S模型和STCA-S的更新方式构建了STCA-M协同换道模型.
2) 根据实际双车道路况进行了数值模拟,并与STCA、STCA-I、STCA-S、FV、SV模型进行了对比,由平均流量数值可知,本文模型能够增加道路的车辆容纳,在较宽的车辆密度范围内提高道路流量,相比STCA-I模型提高了约21.21%,相比STCA-S模型提高约7.28%.
3) 对时空图进行分析,证明本文模型具有良好的行车指引作用,有效减少车辆的起-停,同步相获得增加;从换道频率曲线可以看出,本文规则灵活,能够在安全的前提下给予更多的换道机会,相比STCA-S模型提高约6.91%.但本文STCA-M模型给予车路系统下信息交互假设,所以遵守率会对模型的指引效果起到较大影响,另外信息量的增大是否适合人为驾驶情况,仍需进一步的验证与研究.
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
汽车实用技术(2022年5期)2022-04-02
卫星应用(2021年11期)2022-01-19
汽车观察(2019年2期)2019-03-15
中学生数理化·八年级物理人教版(2015年12期)2016-01-25
中学生数理化·八年级物理人教版(2015年12期)2016-01-25
中学生数理化·八年级物理人教版(2015年12期)2016-01-25
