动态无线充电循迹小车系统的设计与实现*
2020-12-16 09:11关志艳张振宇张哲祎周梦洁赵国帅
山西电子技术 2020年6期
关志艳,张振宇,张哲祎,周梦洁,尹 婷,赵国帅
(山西大学商务学院 信息学院,山西 太原 030001)
0 引言
依据2019年8月全国大学生电子设计大赛山西赛区题目,无线充电系统融合了传感器、电机控制、处理器等多项硬件技术,为有效的对其进行控制,还加入了软件算法。无线充电系统是典型的软硬件技术的结合体,具有一定的研究价值,其中电动小车动态无线充电是无线充电要解决的一个主要技术问题[1]。
依据题目要求设计制作一个动态无线充电的电动小车,要求在规定的平面跑道自动按顺时针方向循迹前进,并能够无线充电;在遇到4 cm直径的黑色圆点时停止。跑道的标识为一根直径0.9 mm的黑色胶布。
1) 要求
a)小车能通过声或光显示是否处在充电状态。b)小车放置在A点,接通电源充电,60 s时断开电源,小车检测到发射线圈停止工作自行起动,沿引导线行驶至B点并自动停车。c)小车放置在A点,接通电源充电,60 s时断开电源,小车检测到发射线圈停止工作自行起动,沿引导线行驶直至停车(行驶期间,4个发射线圈均不工作),测量小车行驶距离L1,L1越大越好。
2) 整体框图
如图1所示,无线充电模块的发送端会首先通过振荡电路产生正弦波,为接收端传递能量,接收端将传递的能量转化为电能储存进法拉电容内,法拉电容则为处理器以及电机供电,同时CC2530处理器判断电容是否有正向输入电流,当没有输入电流时,驱动电机驱动,通过四路循迹模块,沿指定路线行驶[2]。

图1 整体框图
1 方案比较、思路分析和模块选择
1.1 总体思路
总体思路:小车采用两驱装置,左右用直流电机带动轮子转动,前方用万向轮来控制角度,在指定路线上单片机利用红外传感器模块来检测黑线,并通过PWM算法控制万向轮角度变化和左右两轮的转速,使小车按照指定黑线路线前进。利用无线充电为法拉电容供电,利用一个开关来选择小车行驶方式。
1.2 单片机方案比较
方案一:MSP430。MSP430[3]是16位的精简指令单片机,但对于初学者不适用,尤其面对现在刚学过51单片机的学生而言,快速在3天时间掌握一个新的16位单片机不现实,因此不适合单片机经验不丰富的大学生。
方案二:CC2530。CC2530[4]是一款51单片机,能够以非常低的总材料成本建立强大的网络节点。CC2530就是给物联网设计的芯片,功耗极低,价格也相对低,适合本系统使用。
综合比较上述方案,发现CC2530的性能最符合题目控制要求,能够满足硬件要求和使用要求,故决定采用方案二。
1.3 电机模块的选择
方案一:伺服舵机[5]。伺服电机可使控制速度,位置精度非常准确,但单片机控制起来程序编写较麻烦,得熟悉PIC算法,这对于单片机编程经验不丰富的学生而言不现实。
方案二:步进电机。步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。输出的角度变化与输入脉冲数有关,单片机控制稍复杂,对于无线充电小车而言,耗电量稍大。
方案三:直流电机。直流电机是指能将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。单片机控制起来简单,并且可以用PWM算法来控制速度,比较适合参加大赛的学生。
综合比较以上几种电机,结合设计所需轻便,尽量在低功耗的前提下单片机控制简单易行,故选择方案三。
1.4 循迹模块的选择
方案一:双路循迹[5]。利用不同的物体会发射不同波段的红外线原理,在小车前置安装红外光发射和接收装置,在小车行驶过程中红外光发射装置不断发射红外光,黑色路线标记会吸收红外光,从而让小车红外接收装置收不到发射回来的红外光。单片机就以是否接收到反射回来的红外光为依据来确定黑线的位置和小车行驶路线。
方案二:四路循迹。原理同上,但不同的是通过四个红外发射接收来确定黑线位置和小车的行驶路线。
综合比较以上循迹模块,结合轨道中有4 cm直径圆时要停止前进,故选择更好控制的四路循迹,即方案二。
2 系统硬件设计
2.1 TI bq51013b无线充电模块
TI公司的bq51013b是种用于便携式应用的,无线电力传输接收器IC。该器件可进行AC/DC电源转换,效率高达93%,非接触式的传输系统,用于无线电源解决方案。
通过利用近场感应功率传输,嵌在便携设备中的接收线圈,通过相互耦合电感,接收由发射机传输的功率,然后接收线圈的交流信号,经过整流和稳压,作为电子系统的电源。在该智能充电小车上,将无线充电线圈放置小车底部1 cm处,紧贴小车底部放置充电接收装置,发射与接收不接触,但可实现对小车的充电[6]。

图2 TIbq51013b引脚
2.2 循迹模块
循迹模块是智能小车的重要组成部分,为保证循迹功能的精确度,本设计采用四路红外光电循迹传感器。传感器两个探线可以根据接收管接收到红外线的多少判断黑线的位置。发射管发出红外光根据黑色吸光原理,当照射到黑线时,反射回来的光线较少,接收管不导通,输出端输出高电平。当照射到白色表面时,反射回来的光线较多,接收管导通,输出端输出低电平。处理器根据红外对管传感器输出的信号来控制车轮转向,从而实现小车的循迹功能。此小车循迹模块由一个cc2530芯片作为主控板和一个四路红外传感器模块板组成,实现信号传入。两个传感器独立工作,互不干扰。
2.3 电机模块
电机驱动芯片选择L298N,L298N采用16引脚DIP封装,每1个电机需要3个控制信号EN12、IN1、IN2,其中EN12是使能信号,IN1、IN2为电机转动方向控制信号,IN1、IN2分别为1,0时,电机正转;反之,电机反转。选用一路PWM连接EN12引脚,通过调整PWM的占空比可以调整电机的转速。选择一路I/O口,经反向器74HC14分别接IN1和IN2引脚,控制电机的正反转。

图3 循迹模块
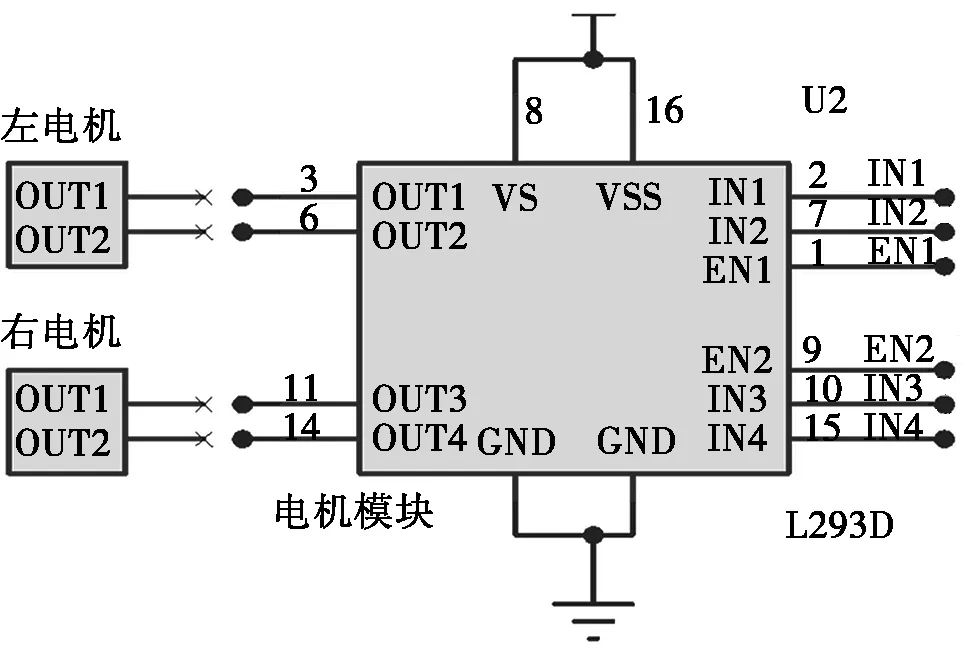
图4 电机电路
3 系统软件设计
本小车编程主要采用IAR软件来编译程序。下图5是小车实现从充电到行驶的的主程序流程图。

图5 主程序流程图
4 测试方案与测试结果
4.1 测试仪器
测试仪器包括秒表、数字万用表、直流稳压电源、米尺等。
4.2 测试方法
数字万用表主要用来测试分立元件的电阻、压降、漏电流、截止/导通状态等参数,测量模块板是否可行。直流稳压电源在测试期间为各待测系统供电。
秒表用以计时充电时间,保证无误差。
4.3 测试结果

表1 供电模块数据

表2 小车无线充电测量数据结果
5 总结
从测试结果来看,该小车系统实现了题目基本要求,PWM技术能够极大地提高电动机的驱动效率,通过四路循迹模块解决了小车循迹的问题,也通过无线充电模块和法拉电容解决供电问题。从运行情况看,整体运行情况很好,小车循迹偏离轨道的问题也得到了很好的解决。想要使得系统更趋于智能化、人性化的特点,可以在未来将语音模块添加其中。
猜你喜欢
红外技术(2022年11期)2022-11-25
湘潭大学自然科学学报(2022年2期)2022-07-28
中国典型病例大全(2022年7期)2022-04-22
纺织科学研究(2021年1期)2021-03-19
少年文艺·我爱写作文(2020年11期)2020-11-23
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
饮食与健康·下旬刊(2017年12期)2017-12-06
电子制作(2017年1期)2017-05-17
青年时代(2017年4期)2017-03-10
少年文艺·我爱写作文(2016年9期)2016-05-14