物品分拣搬运装置的设计*
2020-12-16 09:11张雪梅
山西电子技术 2020年6期
张雪梅
(山西职业技术学院,山西 太原 030006)
1 综述
随着现代科技的发展,生产生活变得更加高效,机械化和自动化成为发展的主流。现有的自动分拣系统发展相对成熟。采用机械爪搬运经过单片机对I/O的循环扫描测得相应的传感器返回值工作,但运动速度相对较慢,完成任务时间长,费用高。采用小车搬运[1],基于微积分微调预测算法程序调节电机的转速及转动方向,使之快速到达道具的位置,进而采用smith预测算法调控舵机[2],使得夹子精确地夹取道具,使得小车达到能够快速将比赛道具移至指定区域的任务要求。该程序采用双算法修正,使整个装置更精确,稳定,但费用要求高,小车在重复的进行搬运,耗费时间也相对长。电机搬运[3],选用STC51单片机,设计以单片机为中央处理器的电机搬运方法,通过提前在单片机输入命令,在电机上放置摆臂,运用四个电机工作,将物体放置指定地点,花费时间少,用费较低,能够较快地进行搬运,但完成的精密数少,不能进行有区别性的搬运。
2 系统设计方案及实现
2.1 总体方案设计
通过比较,综合考虑认为在满足功能要求的前提下51系列单片机相对来说效率较高,成本最低。该物品分拣搬运系统可分为核心控制模块、电源模块、颜色识别模块、显示模块、电机驱动模块、按键检测等构成。整个系统采用电机横向/纵向扫描平台,在纵向轴上放置四个直流电机,其中一组电机实现纵向扫描,另一组实现左右运动的横向扫描,完成物品分拣搬送。在二维基础上加上舵机在固定的丝杆上面,通过带编码器的直流电机和舵机在丝杆上移动,进而进行物品分拣搬送。其系统总体框图如图1所示。
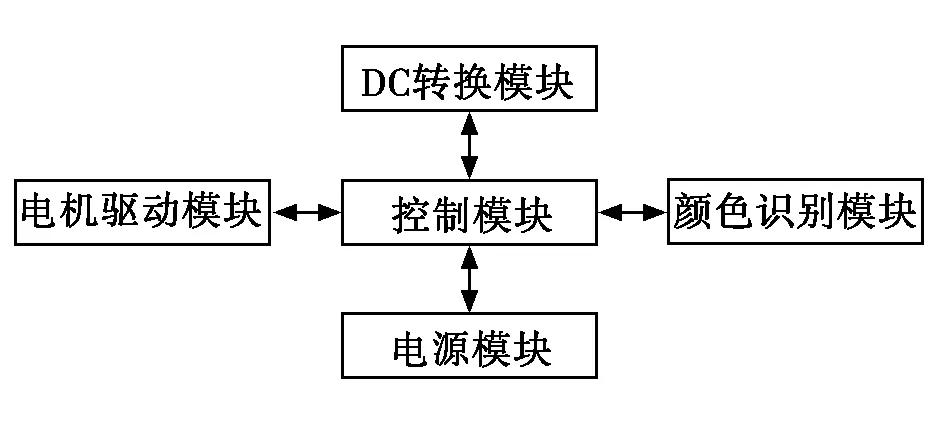
图1 系统总体框图
2.2 原理分析
2.2.1 物体辨别
根据红外对管在检测区域内对物品进行检测,将检测到的物品信息通过通信的方式传送给STC51单片机[4],通过单片机检验的信息来控制舵机和电机的运动,进而实现对物品的筛分,物品检测完后,主控机控制横向/纵向扫描平台将筛分后物品搬运到指定区域。
2.2.2 搬运机构运动控制方法
整个系统采用电机横向/纵向扫描平台,在纵向轴上放置四个直流电机,其中一组电机实现纵向扫描,另一组实现左右运动的横向扫描,完成物品分拣搬送。在系统中丝杆的转动采用的是编码器加直流电机,电机转一圈,可以输出550个脉冲,倍频之后是2200。编码器的额定工作电压是5V,集成了上拉电阻和比较整形功能[5],可以直接输出方波。
根据编码器反馈的AB两相的方波信号,可以对其进行计数,这样就可以计算出车轮电机的转速。编码器的脉冲信号是正方波,每一个周期内都有一个上升沿和下降沿,这样就可以设置单片机的定时器对其进行捕获。单片机的定时器可以设置为正交解码模式,当编码器的两路信号同时传输的时候,可以分别识别其上升沿和下降沿,这样其精度就可以乘以二。因为AB两相信号的时间间隔刚好是四分之一周期,所以捕获两相信号的时候,可以实现倍频的效果。
3 系统硬件电路设计
硬件电路如图2所示,主要由电源模块、舵机[6]、编码器电机、红外对管检查颜色、dc转换[7]这几部分组成。UC2577是三端集成稳压器,设计输出了+5V和+12V电源。单片机完成控制算法,再将计算结果转化为PWM信号输出到舵机。要实现几个舵机的准确转动,单片机和计数器8253进行脉冲计数产生PWM信号。

图2 硬件电路原理图
4 系统软件设计
整个系统在坐标内直接由二维结构控制电机运动,使物品搬送到指定位置。整个系统通过单片机进行编码器电机[8]编码实现不同的电机运动形式,X、Y轴上一个电机实现纵向扫描,另一个实现左右运动的横向扫描,完成物品分拣搬送。在该区域内通过红外对管检验颜色,进行颜色区分,然后将其中黑色物品扫向一侧,桔色物品扫向另一侧,并将不同颜色的物品搬送到各自指定位置。系统软件设计流程如图3所示。
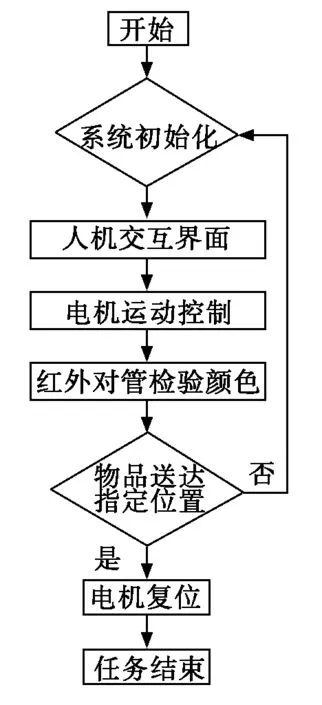
图3 软件设计流程图
5 测试方案与测试结果
5.1 测试仪器
物品分拣搬运装置,示波器,秒表,精度0.1 cm卷尺等。
5.2 测试方法
选用图4所示的测试模型场地,测试过程是将4 cm的正方体物品置于A区域内(距探测边界≥5 cm)任意一点,探测仪从红外测管进入进行检测,在规定时限内对正方体物品进行定位并完成搬送。
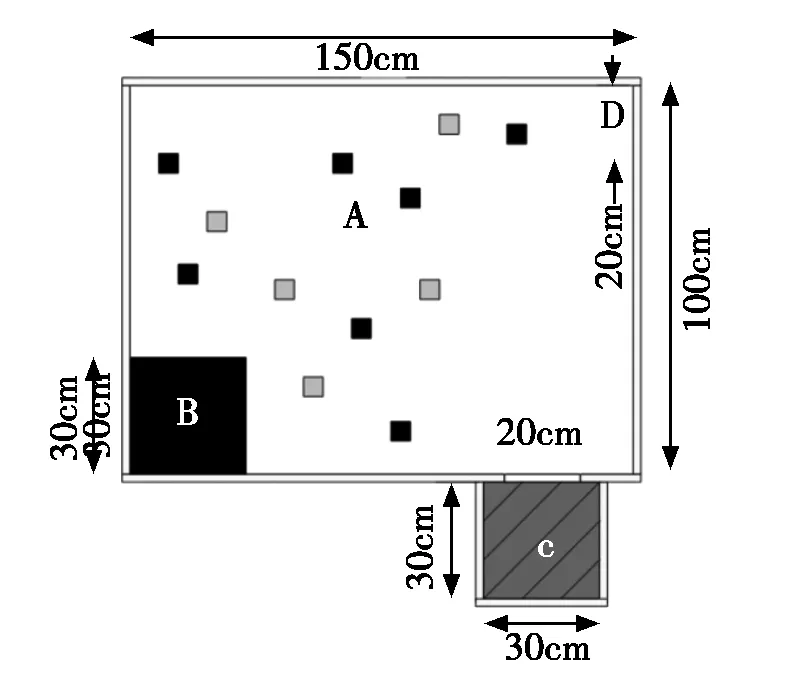
图4 物品分拣系统测试场地模型图
搬送装置实现物品在规定时间内尽快达到目标区域,横轴的右导轨向左方向运行,直到检测到B区的右边界时,停止右导轨的运动。纵轴的左导轨向下运动,直到检测到B区的上边界时,停止导轨的运动。通过GPIO发送完成信息[9],高电平,延时3 s,发送低电平。纵轴左导轨向上运动,检测到左导轨起始点,停止导轨运行。横轴右导轨向右运动,检测到右导轨起始点,停止导轨运行。
5.3 测试数据
系统各项运动指标的测试结果如表1所示。
5.4 测试结果分析
由表1的数据可以得出,该系统能够在一个100 cm×150 cm的区域A内用较短的时间把区域A内的物品搬运到指定区域B或者C区域,并且能够将散落在A区的不同物品分拣开。后续将进一步完善颜色识别系统,加入图像识别算法[10],使识别更加准确。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
商品与质量(2021年43期)2022-01-18
中学生理科应试(2021年10期)2021-12-07
锻压装备与制造技术(2021年5期)2021-11-13
科学技术创新(2021年5期)2021-03-17
——编码器
演艺科技(2020年7期)2020-08-13
轻兵器(2019年8期)2019-08-30
船舶标准化工程师(2018年3期)2018-09-12
电子制作(2018年1期)2018-04-04