
风电并网抑制系统振荡控制策略研究
2020-12-15 08:36李现伟蒋刘兴王宇轩
科学技术创新 2020年36期
李现伟 蒋刘兴 刘 鹏 王宇轩
(1、华北水利水电大学电力学院,河南 郑州450011 2、雅砻江流域水电开发有限公司,四川 成都610000)
近年来,随着风力发电装机容量不断增大,建设百万千瓦级风电场(风电基地)和实现大规模风电跨区远送成为风电发展的战略重点[1]。我国的大型风电场通常分布在偏远的地区,它们远离电力负荷中心,因此其输电线往往具有长距离和重负荷的特点[2-3]。随着基于DFIG 的风电场在电力系统中的普及程度的提高,在系统稳定性和振荡阻尼相关的研究开始变成社会热点。
为了解决这个问题,本文通过研究DFIG 的有功无功调节能力,在DFIG 的有功控制环上设计了辅助阻尼控制器。控制器采用传输线的有功功率作为反馈信号,使用模糊逻辑方法设计了一种最优阻尼控制器。模糊控制器的主要优点是它们不需要系统的详细数学建模,模糊方法还可以克服系统的非线性和不确定性,并在十分广泛的工作条件和瞬态事件中提供强大的性能。
此外,在本文中,为了易于设计和实现,在使用合适的系数缩放模糊控制器的输入和输出时,使用了标准化的模糊隶属函数。
1 双馈风机数学模型
为简单计算,双馈风电场采用单机等值模型。双馈风电场获取风的动能并以旋转的机械转矩的形式传递,如公式(1)所示,

风力机提取的机械扭矩通过传动系统传输到发电机的转子。动力传动系统动力学通常由两个质量模型描述,如公式(2)至公式(4)所示,
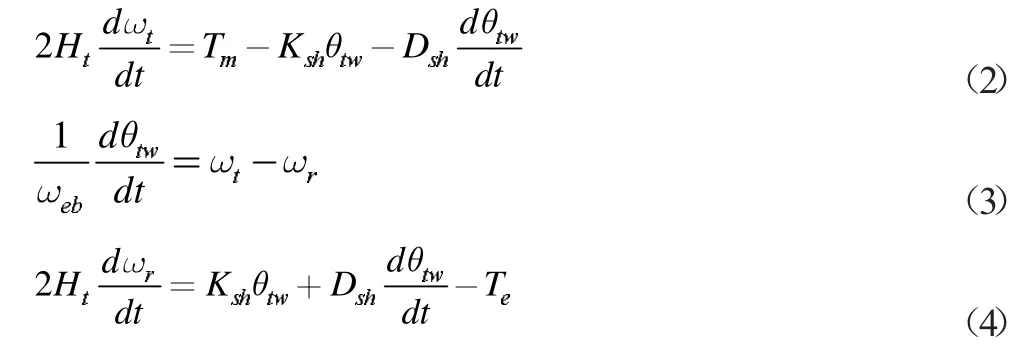
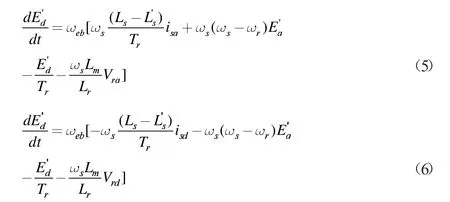
在DFIG 中,发电机是绕线转子感应发电机,定子和转子绕组都连接到网络。对于电力系统稳定性研究,通常会忽略定子的非常快的电瞬态,并且以瞬态电抗后面的电压源的形式对系统进行建模。在这种情况下,d-q 参考系内的转子电动力学描述如下。
2 模糊阻尼控制器设计
传统上,DFIG 的有功功率输出是通过最大功率点跟踪(MPPT)策略确定的。
但是,由于MPPT 控制无法使DFIG 产生惯性响应,故而有功功率控制与电力系统动力学无关。另一方面,风电场的惯性响应会增加电力系统的振荡阻尼。
本文在DFIG 转子侧变流器的有功功率控制回路中提出了一个附加的阻尼控制器,以改善电力系统的振荡。图1 表示RSC 控制器的总体结构以及所提出的阻尼控制器,该阻尼控制器修改了DFIG 有功功率的参考值。
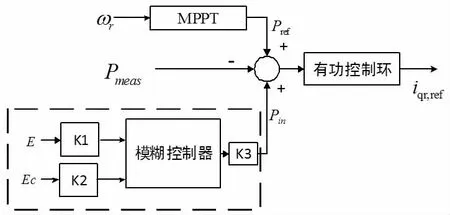
图1 转子侧控制器结构图
在本节中,将使用模糊逻辑方法设计所提出的阻尼控制器。模糊控制器通常接收两个输入作为控制反馈信号的误差和误差变化率。
首先,将输入信号转换为相应的模糊值。在本文中,为了便于设计和实现模糊隶属度函数(MFs),将输入信号按增益K1 和K2 在[-1,1]范围内进行缩放。
其次,通过将MFs 进行归一化确定输入变量对模糊集的隶属度。对于每个输入和输出变量,将考虑七个模糊值,例如:NB=负大,NM=负中,NS=负小,ZR=零,PB=正大,PM=正中,PS=正小。
下一步,模糊推理系统基于可用的模糊规则和模糊推理引擎,推导适当的模糊控制。
最后一步是进行模糊化处理,即是将模糊值转换为准确值的过程。在这里,根据控制范围将输出值在[-0.15+0.15]的范围内缩放,增益取K3。
3 仿真结果分析
在本文中,为测试控制方法的有效性,选择标准的四机两区域系统作为测试系统,四机两区域系统参数见文献[4]。将双馈风电场接入到该系统区域1 中,风电场由75 台2MW 的双馈风电机组构成。
在MATLAB / Simulink 软件中对测试系统进行了仿真,系统结构图如图2 所示。
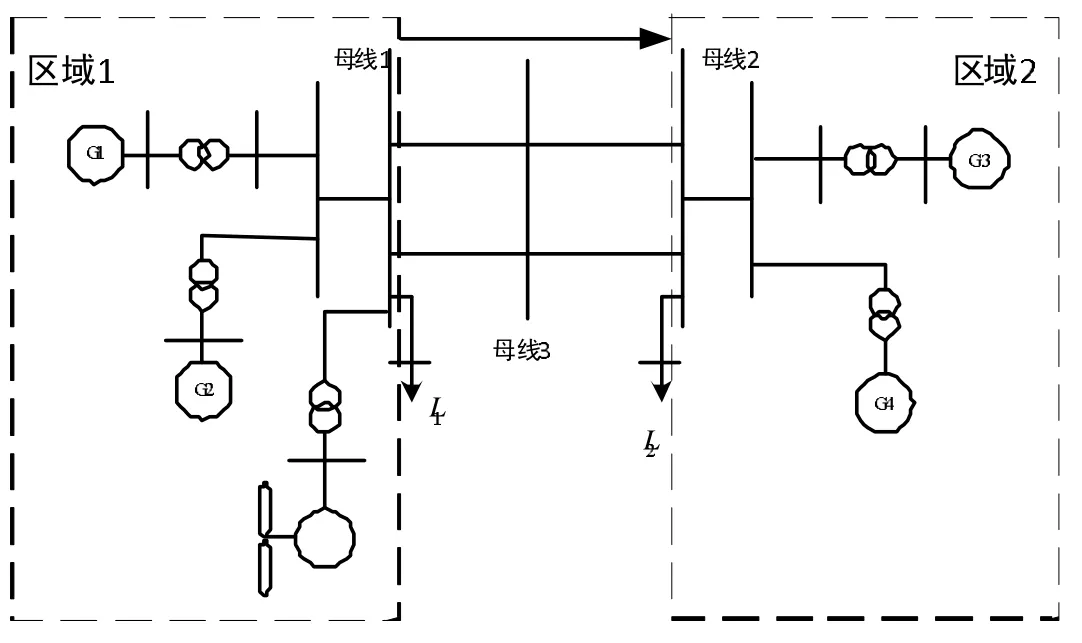
图2 系统仿真结构图
为了验证附加阻尼控制器的有效性,在系统运行至15s 时,在两区域系统传输线上设置三相短路故障,故障持续时间为0.1s。为了分析风电场有功附加阻尼控制器的效果,将系统在没有附加控制,常规PSS 附加控制和改进的附加阻尼控制三种情况下的仿真结果进行对比,观察系统15s 至30s 的系统性能,分析其控制性能。
图3 所示为系统低频振荡情况下三种环境下的传输线有功功率振荡曲线仿真结果,图4 所示为发电机组1 与发电机组4 之间的振荡模式。
通过图3 可以看出,在风电机组采用有功功率附加阻尼控制器的情况下,传输线有功功率的动态特性能够更快的达到稳定状态,减少系统的振荡时间。通过三种不同方法的仿真情况对比可以看出,采用改进附加阻尼控制器得到的系统动态响应效果明显优于另外两种情况,系统低频振荡情况得到了明显改善。
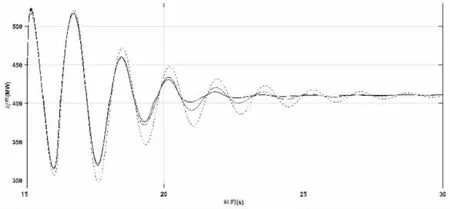
图3 三种情况下传输线有功功率振荡曲线
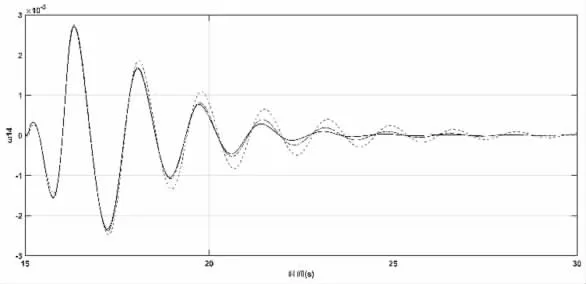
图4 三种情况下发电机组1 与发电机组4 振荡模式曲线
4 结论
本文提出了一种采用模糊逻辑方法的双馈风力发电机组的最优鲁棒阻尼控制器。该控制器采用电力系统联络线的有功功率作为输入信号,在系统发生低频振荡期间,通过双馈风电场的有功功率调节能力,为电力系统产生阻尼。通过在四机两区域系统测试下可以看出,与常规PSS 附加阻尼控制器相比,其能够减少小扰动下的电力系统低频振荡。该控制器通过为系统提供阻尼保障了电力系统的安全运行。
猜你喜欢
大电机技术(2022年4期)2022-08-30
大电机技术(2022年3期)2022-08-06
湖南电力(2022年3期)2022-07-07
防爆电机(2021年6期)2022-01-17
能源工程(2021年2期)2021-07-21
无线电工程(2020年7期)2020-06-17
船舶标准化工程师(2020年1期)2020-06-12
物理学报(2020年6期)2020-04-04
电子制作(2018年17期)2018-09-28
现代商贸工业(2018年15期)2018-05-07
