
基于Elman 神经网络的火电厂锅炉主汽温自动控制方法研究
2020-12-15 08:36朱明泽
科学技术创新 2020年36期
朱明泽
(哈尔滨电气国际工程有限责任公司,黑龙江 哈尔滨150028)
能源是决定国家经济发展的重要因素之一。目前,火力发电仍是我国电力工业的重要组成部分,而锅炉,则是火电厂的重要设备之一[1-2],主蒸汽温度是火电厂锅炉热工过程控制的关键参数[3],因此,必须对主蒸汽温度加以有效控制[4-5]。主蒸汽温度控制方法将影响主蒸汽温度控制效果。电厂蒸汽温度控制系统大多采用串级比例微分积分(Proportion Integral Differential,PID)控制方式[6]。
由于汽温系统具有非线性和不确定性,常规的汽温串级PID 控制已经不能完全满足汽温控制质量的要求。人工神经网络在处理复杂非线性系统的控制问题上有较大优势,对于复杂不确定问题具有自适应能力和自学习能力[7]。
1 锅炉主蒸汽温度控制系统
常规锅炉控制系统由蒸汽温度、燃烧、以及汽包水位控制系统等组成。
目前,单元制机组热力发电系统仍是火电厂主要的发电系统,该系统主要包括汽包,炉膛烧嘴,过热器,燃料,预热器,过热蒸汽,减温器,水,空气,烟气等。锅炉的燃烧过程主要为燃料经燃烧调节器进入炉膛,与空气充分混合后燃烧,使锅炉产生高温高压蒸汽,经用气调节阀发出主蒸汽。
目前,火电厂主蒸汽温度控制系统大多采取串级PID 控制系统,该系统主要分为主回路与副回路调节。主调节器、副回路系统、被控对象的惰性区部分、测温变送器构成了主回路的主要部分。
其中,副回路系统的主要任务是控制降温水的流量,通过比例调节提高主蒸汽温度的抗干扰能力,主要包括副调节器、执行元件、被控对象的导前区部分和测温变送器。
2 基于Elman 神经网络的改进PID 蒸汽温度控制方法
2.1 Elman 神经网络基本理论
Elman 网络的主要结构是前馈连接,包括输入层、隐含层、输出层,在这种网络中,除了普通的隐含层外,还有一个特别的隐含层,称为关联层(或联系单元层),相当于状态反馈。
输入层包含r 个神经元,表示为u=[u1,u2,…,ur],输出层包含m 个神经元,表示为y=[y1,y2,…,ym],隐含层输出向量h=[h1,h2,…,hn],承接层输出向量t=[t1,t2,…,tn]。w1表示输入层与隐含层间的连接权值矩阵、w2表示隐含层与输出层间的连接权值矩阵、w3表示关联层与隐含层间的连接权值矩阵,前两个权值矩阵在迭代训练中不断地更新修正,而w3是一个固定的权值矩阵。则Elman 神经网络的迭代计算公式如式(1)、式(2)和式(3)所示。

式中,α 在[0,1]间取值,表示连接反馈增益因子。f(·)、by分别表示隐含层神经元的激活函数与阈值矩阵,g(·)、bh分别表示输出层神经元的激活函数与阈值矩阵。
2.2 基于Elman 神经网络的改进PID 蒸汽温度控制
本文基于传统PID 主蒸汽温度控制方法,提出基于Elman神经网络的改进温控方案,通过对主蒸汽状态参数进行辨识,提高系统自适应性。基于Elman 神经网络的改进温控系统结构如图1 所示。
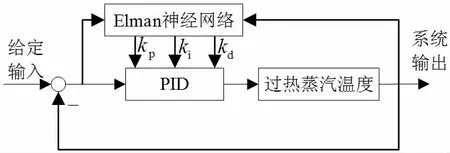
图1 基于Elman 神经网络的改进温控系统结构图
基于Elman 神经网络的多参数辨识步骤如下:
(1)获取蒸汽压力、蒸汽温度、产气量、炉膛温度、炉膛压力、烟气含氧量等关键参数值;
(2)利用小波包对输出信号进行分解,计算小波包系数,得到全部的频域特征;
(3)计算各个参数待辨识状态与正常状态小波包系数的马氏距离,根据马氏距离的大小进行关键特征选取;
(4)步骤3 获得的关键特征作为Elman 神经网络的训练集,完成Elman 神经网络的建立;
(5)利用步骤4 建立的Elman 神经网络完成锅炉蒸汽多参数辨识。
3 仿真验证
在仿真实验中,利用Elman 网络依据被控系统的性能动态地调整参数kp,ki,kd,并对上述三个PID 控制器参数进行特定指标下的寻优,最终使得增量式PID 控制器相对于常规的PID 控制器呈现更加良好的性能。
控制误差可根据增量式PID 控制器得到:

PID 的3 项输入为:

控制算法为:

相关文献中,取被控对象蒸汽温度数学模型为:

在图2 的仿真曲线中,仿真时间设定为5 秒,阶跃输入r 取值为1。
根据图2 的结果可分析出,kp,ki,kd三个参数值快速收敛,当收敛值基本稳定时,可认为此时的取值为最优参数。上述结果说明通过不断地实时地调节参数,可以达到系统的输入值和输出值的静态指标需求,同时,也进一步证明系统的动态性能较好。

图2 输入曲线和输出响应曲线
4 结论
分析了单元制机组热力发电过程,研究了影响蒸汽质量的各项参数指标。
通过分析传统PID 蒸汽温度控制方法,提出了基于Elman神经网络算法的改进PID 控制策略,提出了基于马氏距离的蒸汽参数辨识流程。
通过仿真分析,证明了所提Elman 神经网络算法提高PID控制方法动态性能的有效性,为实现火电厂锅炉主蒸汽温度自动控制提供了参考。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
消费电子(2022年6期)2022-08-25
成都信息工程大学学报(2022年3期)2022-07-21
邮电设计技术(2021年2期)2021-03-13
小学阅读指南·低年级版(2020年10期)2020-10-12
活力(2019年22期)2019-03-16
活力(2019年22期)2019-03-16
计算机与数字工程(2018年5期)2018-05-29
计算机测量与控制(2018年3期)2018-03-27
山东工业技术(2016年15期)2016-12-01
