基于障碍物检测功能的盲人辅助服装设计
2020-12-15 12:37:34朱祥成刘亚侠竹潇潇
毛纺科技 2020年11期
朱祥成,刘亚侠,竹潇潇,胡 兰
(北京服装学院 服装艺术与工程学院,北京 100029)
中国是世界上拥有盲人数量最多的国家,大约有1 400万人,同时每年还会新增大约45万的盲人[1],因此盲人的出行安全应该引起人们的广泛关注。在很多地区,盲道破损、盲道设计不合理、盲道被占用的情况比较严重[2-3],导致盲人的出行十分不便。在我国,盲人出行时一般会选择经济实惠的盲杖作为出行的辅助装备[4],但是盲杖的探测空间有限,如果盲人在行走时没有及时发现盲道被占用等情况,就容易发生意外。
目前导盲辅具一般分为4大类:①导盲犬类。导盲犬是一种可以帮助盲人外出行动的服务犬,具有温顺、聪明、亲和性好等特点。我国导盲犬训练工作开始较晚[5],其存在培养周期长、培养费用高、人均分配导盲犬数量低等问题。②手持类导盲辅具。在我国使用范围最广的是普通盲杖,这种盲杖取材方便、经济实惠,盲杖材质通常为竹子、树枝、不锈钢管等。但普通盲杖未经过专业的设计与制作,所以在安全性与功能性上无法得到保证。近年来出现了许多在传统盲杖基础上加上电子设备的智能手杖,方仁杰等[6]设计了一款具有GPS定位和超声波测障功能的智能拐杖,通过控制能够实现灯光闪烁与声音报警。俞国华等[7]对盲杖添加了多种环境状况勘测功能,可以实现对路面积水、下行台阶的检测。③穿戴类导盲辅具。一般以头盔、腰带、鞋的形式出现,通过传感器对周围环境进行探测,并为穿戴者及时进行预警。美国大学机器人实验室Shoval以避障系统为基础,设计出一款腰带式辅助装备,其可以带领使用者绕过障碍物,并告知使用者障碍物的大小、远近等信息[8],但是其特殊的造型会引起旁人的过度关注,给使用者带来心理上的不适。④移动类导盲辅具。一般以导盲机器人为主,其可以引导盲人前进,也能与盲人进行信息交流。张莹[9]以嵌入式技术为基础开发了一款导盲机器人,能指引盲人正常转体、前行、后退,也能有效避开前方障碍物,识别出盲道、斑马线和信号灯颜色等。导盲机器人功能丰富,可以为盲人提供精确的导航信息,但也存在体积硕大,不易使用等缺点。
目前已有的导盲辅具存在着探测空间局限、笨重不易携带、价格昂贵等缺点,所以经济高效的盲人辅助工具成为了广大盲人群众迫切的需求。
1 设计思路
本文根据盲人出行特点及特殊需求,通过Arduino智能服装平台[10],利用导电缝纫线(由可导电的不锈钢材料制作,具有质地柔软、不生锈等特点)以及易拆卸连接设计,将可穿戴电子硬件与普通服装巧妙结合,设计制作了一款不受运动干扰、价格低廉、可拆卸能水洗的盲人辅助服装。
盲人在行动过程中使用盲杖对路况进行探测,盲杖在正常使用过程中存在局限性,仅能对盲人身体中下部分的路况进行简单探测,对处于人体上半身的悬空物体无法进行探测,这样会给盲人的出行带来一定的危险。因此本文设计了一款上衣,可以有效的探测前方悬空障碍物,并能够给盲人及时提供反馈信息,根据盲人和障碍物的距离远近,服装可以及时给出不同的声音提示。盲人辅助智能服装同时也会有一些其他有利于盲人出行的设计,包括夜间出行安全设计、服装颜色识别设计、物品识别设计等[11]。盲人辅助服装可以配合普通盲杖,为盲人的出行安全构建一个简单、全方位的预警机制,这样在一定程度上可以避免悬空物体对盲人造成伤害。
2 电子系统设计
通过资料对比研究,本文所设计的盲人辅助服装将通过探测盲人与障碍物之间的距离,根据预设程序及时报警,从而实现盲人对障碍物的躲避。
Arduino控制器根据型号不同可以分为Arduino Uno、Arduino Nano、Arduino LilyPad等,在本文电子系统中采用的控制核心是LilyPad Simple Snap,属于Arduino LilyPad系列的一种口袋式按扣型Arduino控制器,可以使用Arduino IDE软件进行编程。Arduino LilyPad系列产品是专为可穿戴设备而设计的,具备微型、功能齐全、能耗低等特点。根据盲人辅助服装的功能设定,在系统中使用的传感器是防水超声波测距传感器,超声波传感器与红外线传感器相比较,具有较强的方向性,能够精准地进行测量,而且超声波传感器能量消耗较慢,能够识别透明物体,如玻璃等[12]。防水超声波测距传感器不同于传统超声波距离传感器,其在探测部位采用防水全封闭设计,超声波的收发集于一体,这样的设计方便在户外场景中使用,尤其是在雨天中使用,该传感器在测量精度与美观度上也有很大的提升。盲人辅助服装中使用的执行器是LilyPad Buzzer,这是一款为LilyPad配套设计的蜂鸣器,其在使用上十分方便,只需要占用LilyPad单片机的2个串口,就可以根据程序的设置实现声音的变化,这款蜂鸣器还具备声音大、不刺耳的特点。
2.1 电路设计
盲人辅助智能服装的基本工作原理是,在服装上安装的3个超声波传感器,可以主动发出超声波并进行距离探测,服装的控制核心会对3个超声波传感器传回的信号分别进行距离判断,当其中任意一个传感器探测到的距离处于预设报警距离时,蜂鸣器就会发声报警,蜂鸣器将会根据人与障碍物距离的远近改变提示音,当距离远时,声音是高频低音,当距离变近时,声音就会变为低频高音[13]。盲人辅助服装电路系统工作结构见图1。盲人辅助服装电路硬件连接见图2。
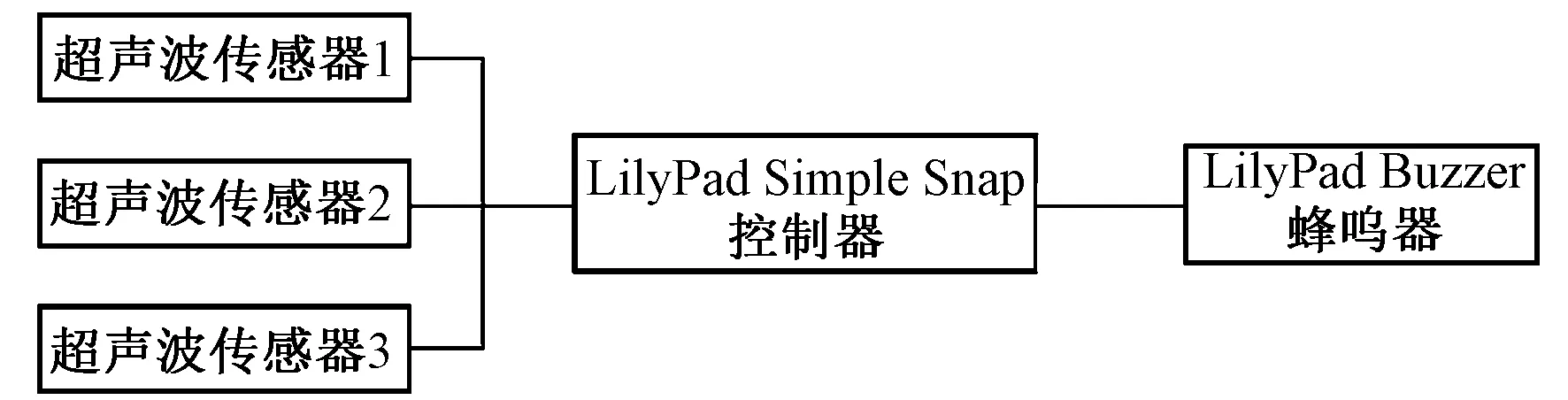
图1 盲人辅助服装电路系统工作结构
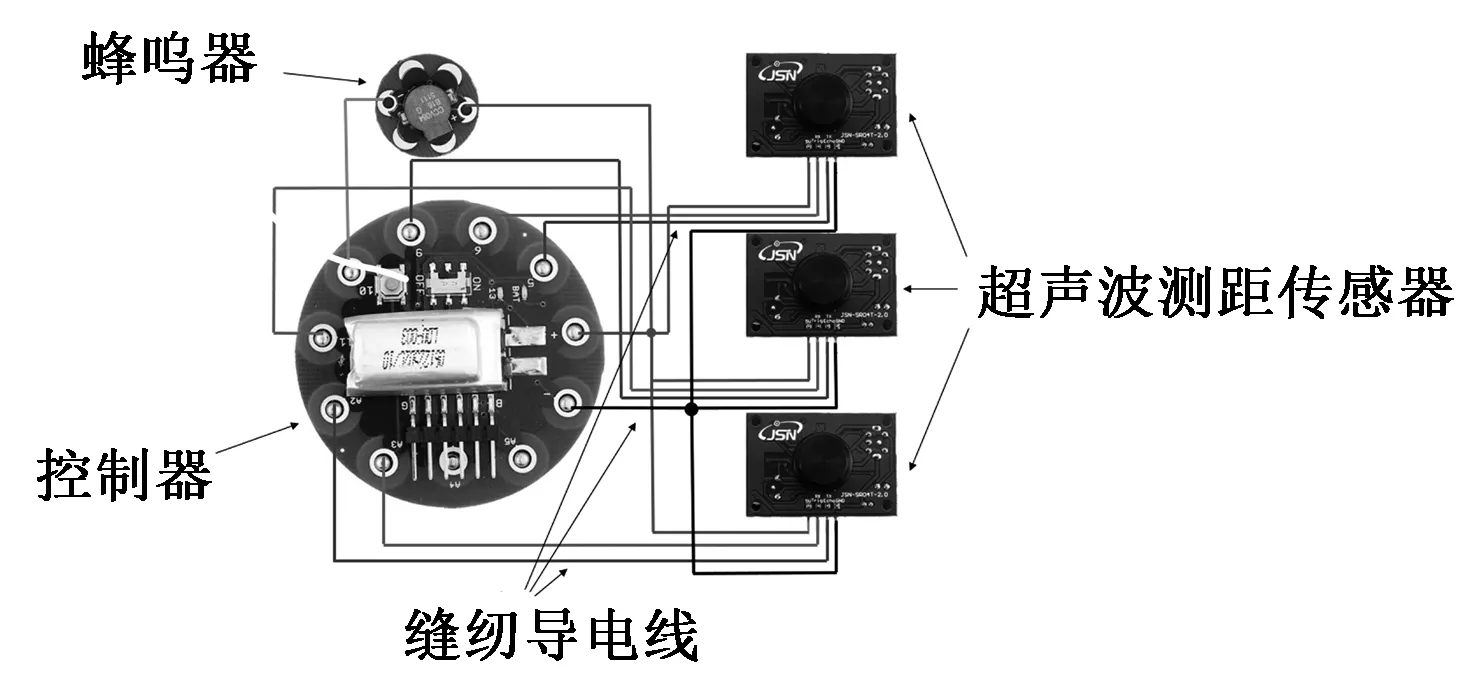
图2 盲人辅助服装电路硬件连接
2.2 电路连接设计
本文所设计的盲人辅助智能服装,在硬件连接中没有使用由绝缘皮包裹的传统金属导线,而采用了一种导电缝纫线,该导电缝纫线的柔软性良好,同时还具备抗弯折能力强和拉伸强度高等特点,埋藏在服装中不会有明显的异物感,导电缝纫线见图3。
图3 导电缝纫线
由于纺织导电缝纫线没有绝缘层,所以在进行服装布线的时候,需要使用普通缝纫线将各个导电线隔离,防止其相交造成电路短路。盲人辅助智能服装的硬件与导线之间是可拆卸的,通过金属按扣与接线端子将导线与硬件连接,该设计可以让服装内的电路系统,在具有良好信号稳定性的同时,也具备了可拆卸性。根据实际需求可拆卸电子硬件,从而实现该智能服装的可水洗功能,金属按扣连接方式见图4,接线端子连接方式见图5。

图4 金属按扣连接方式
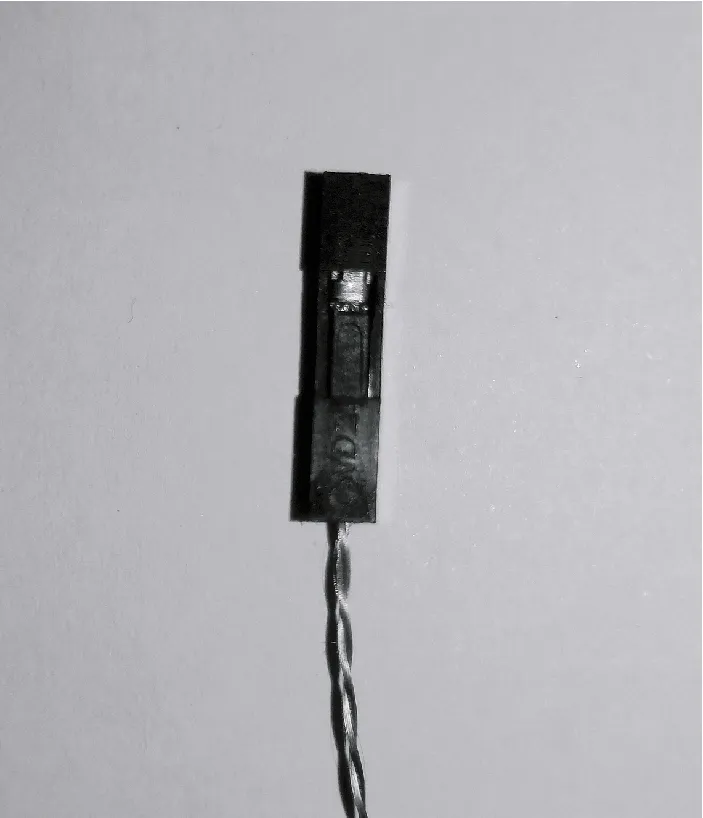
图5 接线端子连接方式
2.3 程序逻辑设计
本系统在Arduino IDE软件中对单片机中所使用到的程序进行编写,通过主控制芯片实现对各个硬件部分的控制。主程序逻辑设计如图6示。
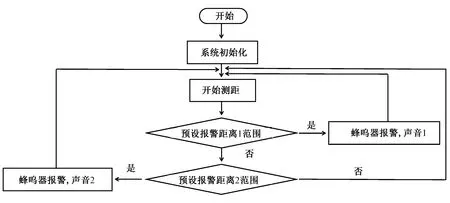
图6 主程序逻辑图
超声波传感器3点测距代码如下所示:
int selectDistance(int distance1,int distance2,int distance3){
if(distance1==distance2 || distance1==distance3)
return distance1;
else if(distance2==distance3)
return min(distance1,distance2);
else
return min(min(distance1, distance2), distance3);
部分判断程序代码如下所示:
if(distance>80&distance<150){
for(int x=0;x<180;x++){
sinVal=(sin(x*(5/180)));
toneVal=(int(sinVal*100000));
tone(10,toneVal);
delay(2);
}
}else if(distance<80&distance>0){
for(int x=0;x<180;x++){
sinVal=(sin(x*(3.1412/180)));
toneVal=2000+(int(sinVal*1000));
tone(10,toneVal);
delay(2);
}
}else{
noTone(A);
}
3 盲人辅助服装设计方案
3.1 款式设计
盲人群体有视觉障碍,不能像平常人那样可以快速准确地识别一件服装的正反及服装的颜色。盲人失去了视觉,仅仅依靠听觉与触觉去感知世界,很容易造成安全感的缺失。本文根据盲人的部分特点设计了一款半开拉链翻领卫衣。当盲人穿上这款卫衣时,会产生一种包覆感,通过这种方式让盲人的安全感得到一定的提升。盲人可以根据拉链或者领子的位置快速识别服装的正反,同时还可以根据设置在服装背面的颜色识别卡,来确定所穿服装的颜色。颜色识别卡是用3个凸起半球来代表服装颜色,凸起半球以时钟刻度的形式均匀分布在圆盘上,不同颜色代表的凸起半球在颜色识别卡上分布的位置不同,盲人可以根据预先设定好的颜色位置,通过触摸得知此件衣服的颜色。此款服装还设计了多个口袋,盲人可以根据物品放置的位置,方便快捷地找到所需要的物品。根据人体肢体的动作特点,在服装上肢常动部位与后背位置设计了反光带,这在一定程度上也提高了盲人夜间出行的安全性。盲人辅助服装正背款式图如图7所示。
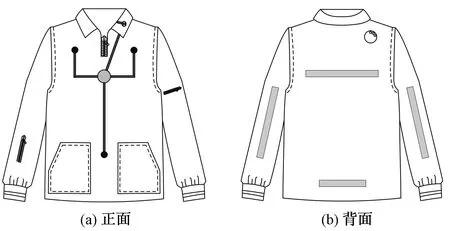
图7 盲人辅助服装正背款式图
3.2 面料的选择
盲人辅助服装的面料采用了TPU贴膜的纬编双面针织物,织物正反两面均可以看见正面线圈,织物成分为100%涤纶,其具有防水、透气、弹性适度等特点,而且还具有良好的耐磨性与柔韧性,一般用于户外服装。
3.3 传感器及其他硬件定位
在对服装的研究过程中,使用OptiTrack 全身动作捕捉系统,采集测试者模拟盲人使用普通盲杖行走时,贴在服装表面标志点的实时坐标信息。通过对输出图像与输出数据的研究分析,发现当模拟盲人使用盲杖时,手臂会在身体正前方做左右以及上下扫摆动作,如果在扫摆动作范围内设置超声波传感器,会让电子系统造成误判提醒。因此综合左右手臂的活动范围,在上肢动作范围死角所对应的服装位置上设置一个超声波传感器。当测试者做转体动作时,设置在测试者左右肩部标志点连线的旋转角度,与身体的实际旋转角度相一致,所以在身体正前方的左右肩部位置各设置一个超声波传感器。
据相关研究[14]显示,盲人虽然失去了视觉能力,但在听觉方面的能力得到了极大的提高,所以将蜂鸣器设置于左领的下方,可以让盲人及时清晰的收到报警信息。通过调节缩小蜂鸣器声波的传播范围,在一定程度上保护了盲人群体的隐私,减少了心理上的不适感。控制核心的摆放位置,以到各个硬件设备距离最短为原则,并且将其放在服装的中心位置,使得整件盲人辅助服装更加美观。
4 服装效果测试
4.1 测试方法
为保证实验的安全性与数据结果的科学性,本文实验选取6名身高均为172 cm的男性在校大学生,他们将完成2项实验内容:蒙眼绕行多组障碍物、转弯直行;躲避固定墙面。将6名测试者分为2组,每组3人,第1组测试者仅手持普通盲杖进行测试,第2组测试者手持普通盲杖并身穿盲人辅助智能服装进行测试。
在实验准备阶段,每位测试者预先佩戴眼罩,手持盲杖进行20 min的自由活动,保证测试者熟悉黑视环境。
实验一的内容是2组蒙眼测试者在陌生场地中进行绕行多组障碍物、转弯直行能力测试。在实验中,由工作人员带领测试者到测试场地开始行走测试,并记录通过测试内容的时间。实验一的判定标准为:测试者通过所有障碍物且不撞上障碍物,最后到达指定位置就表示测试成功,否则表示测试失败。在测试完成后,记录2组蒙眼测试者在测试时的主观感受,并对描述内容进行比较分析。
实验二的内容是2组蒙眼测试者躲避固定墙面反应能力的测试。在实验中,由工作人员带领测试者到距离墙面5 m远的固定点位处,测试者面向墙面开始行走测试,记录测试者从开始出发到发现障碍物并转身的时长,通过对比时长来比较测试者躲避固定墙面的反应能力。在实验二中的时间记录原则为,以测试者迈出第1步作为时间记录的开始点,以测试者转身作为时间记录的终止点。
4.2 测试结果
实验一测试结果如表1所示。
由表1可知,在第1组仅使用普通盲杖进行蒙眼测试的3位测试者中,仅有1位测试者通过了测试且耗时较长,其他2位测试者分别因为无法走出测试区域或多次撞上障碍物导致测试失败。第2组使用普通盲杖并穿着盲人辅助智能服装的3位测试者中,有2位测试者顺利准确的通过了测试区域,另1位测试者在测试过程中轻微撞上了障碍物,但最后也通过了测试区域。结果表明穿着盲人辅助服装后,对于测试者蒙眼行走有一定的帮助,可以提高测试者通过障碍区域的速度与准确性。
6位测试者对进行蒙眼行走测试时的感受描述如下。第1组测试者在蒙眼行走测试过程中,表示会有轻微的焦虑感与紧张感,缺乏安全感,感觉四肢冰冷,身体局部有汗液出现。第2组测试者在蒙眼行走测试过程中,表示仅有紧张感,无明显不适感。因此穿着盲人辅助服装在一定程度上可以提高人体的舒适感与安全感,减少心理上的紧张情绪。
实验二的测试结果如表2所示。可知,仅使用普通盲杖进行蒙眼躲避固定墙面的3位测试者,发现障碍物并转身所耗费的时间明显多于穿着盲人辅助智能服装的测试者。结果表明盲人辅助智能服装在一定程度上提升了盲人躲避障碍物的反应速度。
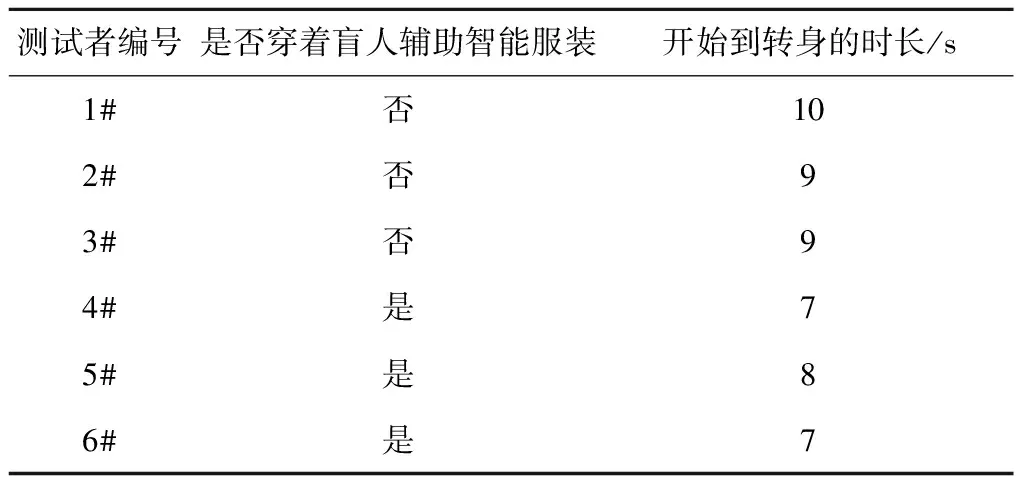
表2 实验二测试结果
5 结束语
本文从服装的功能设计、造型设计等方面,对盲人辅助智能服装进行了研究,以超声波传感器的测距功能为基础,提出了一种针对盲人出行安全的智能辅助服装设计方法,以及2种盲人辅助智能服装效果测试方法,得出这款盲人辅助智能服装可以帮助盲人快速识别并躲避障碍物的结论。同时服装的颜色识别设计、夜间出行安全设计,使得盲人辅助智能服装在使用过程中更加人性化与合理化。
随着社会大众对盲人群体关注度不断地增加以及科技水平的不断提高,专为盲人群体设计的智能服装在一定程度上将改变他们的生活方式。本文的盲人辅助智能服装的设计思路以及服装效果测试方法,可为盲人群体智能服装提供参考。
猜你喜欢
小猕猴智力画刊(2023年11期)2023-11-30 03:21:16
环球时报(2019-09-17)2019-09-17 06:14:38
小天使·一年级语数英综合(2019年8期)2019-08-27 02:23:00
中国工作犬业(2019年2期)2019-03-06 12:26:16
小学科学(学生版)(2018年11期)2018-11-22 07:12:26
发明与创新·中学生(2017年12期)2017-12-11 00:25:48
小天使·一年级语数英综合(2017年10期)2017-10-31 07:21:28
东方教育(2016年20期)2017-01-17 20:19:27
发明与创新·中学生(2016年1期)2016-05-30 10:48:04
环球时报(2014-10-08)2014-10-08 08:00:13