
水族箱增氧泵智能控制系统设计
2020-12-14 04:37林天翔丁嘉
电脑知识与技术 2020年28期
林天翔 丁嘉


摘要:该文在分析水族箱增氧泵主要功能和结构原理的基础上,引入以微控制器为核心的现代计算机智能控制手段,利用成熟的传感器和电机技术,对传统水族箱增氧泵进行了改进,使其与智能水族箱系统融合性进一步提升,提高了增氧泵运行效率,具有节能、降噪等特点,在家庭使用之余对农业上珍贵鱼类养殖也有借鉴意义。
关键词:增氧泵;智能控制;步进电机
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2020)28-0225-03
1 背景
随着经济水平改善和生活水平提高,饲养金鱼或者热带鱼已经成为很多人工作之余的一种兴趣爱好。饲养鱼类一方面可以美化环境、调节室内空气湿度;另一方面也可以陶冶情操、增长知识、活跃家庭氛围。饲养鱼类也是一件很讲究的事情,需要一定的知识和技术。在现实中,很多职业者工作生活节奏都很快,时常顾不上对鱼类的照料,导致鱼类死亡率偏高,影响心情。在这种情况下,智能水族箱就应运而生。
所谓智能水族箱就是利用现代化的计算机控制技术对传统水族箱进行智能化改造,利用先进的传感器技术加强对环境因子的检测强度和频度,以检测数据为依托,加强系统对环境因子的感知能力;再将生物、农业、物理等多学科知识和经验融合成控制算法,对环境因子进行分析,做出科学判断和控制命令;通过电机、继电器、电磁阀、加热器等电气执行机构,改变环境因子,使之满足鱼类生长的需要,同时达到节能、降噪等目的。先进的智能水族箱还有视频检测、图像识别、远程网络传输等功能,可以将水族箱现场画面通过无线数据模块和互联网传输到远端或者移动APP上,这样即便用户在外地出差,都能及时了解到家中水族箱的情况[1]。
水族箱增氧泵是水族箱的重要组成部件之一,它的原理与工业增氧泵非常类似,但功率较小。其基本工作原理是将空气通过气泡石分解成若干微小气泡并压入水中,当空气中的氧气与水体充分接触后,部分氧气溶入水中,从而增加水体的溶氧量,满足水族箱中鱼类、硝化细菌和藻类等耗氧生物的生理需求。
鳃小片是鱼腮上负责交换气体的组织,它包含两层细胞和丰富的毛细血管,形成了一道容许氧气通过的壁。溶氧量分压差是指水体中溶氧量的压力与鳃小片中溶氧压力的差值。当分压差大于1时,水中溶解氧将通过鳃小片的壁,顺利进入血液并与其中的亚铁血红蛋白(Hb)共同转化为氧合血红蛋白(HbO2),当氧合血红蛋白通过需要氧气的身体组织时,由于此时二氧化碳分压差较低,氧合血红蛋白会重新分解成氧气和亚铁血红蛋白,供组织细胞使用。其相关转换表达式如公式1、2所示。其中PCO2表示二氧化碳分压差。
从公式4可以看出,二氧化碳与血红蛋白分离必须满足一个条件,即氧合血红蛋白浓度较高。
综上所述,在水中维持一定量的溶氧量至关重要。天然水体的溶氧量一般在6.5-7mg/L,而人工水族箱的溶氧量通常在3-5mg/L,因此为了弥补水中溶氧量不足,很多用户使用大功率增氧泵24小时运转,终年不息。这种方式既没有考虑到鱼类的真实需要,浪费了大量电力,也在夜深人静时也增大了屋内噪声,容易影响睡眠,是一种粗放型管理模式。
本课题就考虑利用计算机控制系统优秀管理能力,引入精细管理模式,对传统增氧泵的运行控制进行改进,使其能够具备根据环境和时间条件自动调节出气量的功能,减少人为干预,降低噪声,节约能源,避免因长期出气量过大导致鱼类产生气泡病,影响健康。
2 设计原理和硬件框图
从内部结构上看,增氧泵的核心是一个220V供电的电磁线圈、磁铁以及皮碗。当线圈通过220V交流电正半周时,线圈吸合与皮碗相连磁铁,并带动皮碗运动,空气被鼓入;当交流电的负半周通过线圈时,磁铁与电磁线圈相斥,推动皮碗复位。皮碗复位时会压缩内部的空气,此时出气口就会产生气流。由于交流电的周期是50Hz,故皮碗也会不断张开和压缩,不断将空气鼓出。
在皮碗上部会有一块胶块,旋转胶块可以改变皮碗与进气阀胶垫的张紧力,当张紧力较大时,皮碗与进气阀间隙极小,大部分气体通过管道输送到气泡石气量就大,反之气量减少,这也是增氧泵气量调节的基本原理。如果用步进电机的转轴与胶块相连,即可通过控制步进电机旋转角度实现对出气量的自动调节。
从溶解氧的物理性质看,其溶解度与温度呈反比,与气压呈正比,即温度越高气压越低,溶解氧含量越少。另外通过对水族箱内耗氧生物的耗氧规律研究发现,在无光照的夜间,藻类也是耗氧大户,通过呼吸作用消耗水中溶解氧,尤其到凌晨4-5点时,溶解氧含量将达到全天最低点。由此可见,增氧泵的控制还需要关注光照、时间、温度、气压等条件。
考虑到我国人口大部分分布在低海拔地区同时为简化系统设计,故省略气压条件,以其他三个因素为基准,我们设计出的智能温控水族箱增氧泵硬件系统框图如图1所示。
微控制器是系统核心,主要功能是接收外部环境检测信息,分析处理后将其转换成电机控制信号,驱动步进电机和机械轴,进而改变增氧泵出气量。由于系统输入输出数据较少,不考虑输出指示灯的情况下,最少只需要8个输入输出口,因此可选用20脚左右的简化型单片机如STC15W408AS作为控制核心。
温度传感器可以选用防水的DS18B20,其器件是一种数字式集成型温度传感器,检测范围在-55-125℃,检测精度约±0.5℃,完全符合要求。外部时钟主要向控制系统提供时间基准,要求能长期可靠工作,在具体选型时可以选DS12C877或者DS1302。
光敏电阻用于感应周围光照,采用一个光敏电阻與一个固定电阻串联的读取方案,当光照低于一定程度时,光敏电阻会增大,导致两个电阻联结点电压降低,将这个电压送微控制器读取后可判断当前的光照状态。
驱动器可以考虑使用ULN2003。ULN2003是一种集成型大电流达林顿管阵列,输出电流约0.5A,足以驱动微型步进电机。
步进电机是一种脉冲驱动的步进电机,在本次设计中选择28BYJ48型步进电机。它是一种带减速的四相永磁式步进电机,减速比约为1:64,步进角约0.0088°,约4096个脉冲旋转一周,较多的分级数便于实现对张紧力的精确控制。
电源模块主要用于向整个系统供给稳定的电源,可选择220V转换为3.3V或者5V的开关电源模块来实现。
以上模块都是非常成熟产品,选用它们可以进一步降低成本。在实际安装制作时该系统还要考虑必要的密封防水要求。如果本身就处于智能水族箱中,还可将控制核心与智能水族箱的核心合并,进一步简化设计[2][3]。
3 程序设计
当系统上电后,首先进行自检,然后调用外部时钟模块导入时间,同时开展测温工作,当温度达到10℃以上时,开启增氧泵,并根据温度逐步改变步进电机旋转角度,引起气阀张紧力变化,当温度达到30℃以上,步进电机的旋转角度达到最大,此时气阀张紧力也最大,增氧泵全负荷工作。在10℃以上时,温度与步进电机旋转所需脉冲数的关系如下:
其中y代表步进电机从原点旋转的拍数,t代表当前温度值(单位为℃)。
温度和时间是主要检测量,只要其中满足一个条件即开启增氧泵,而光敏电阻代表次要的检测量,当处于时钟处于白天,但所在地温度不足时,也可以干预步进电机的工作,给系统以参考。
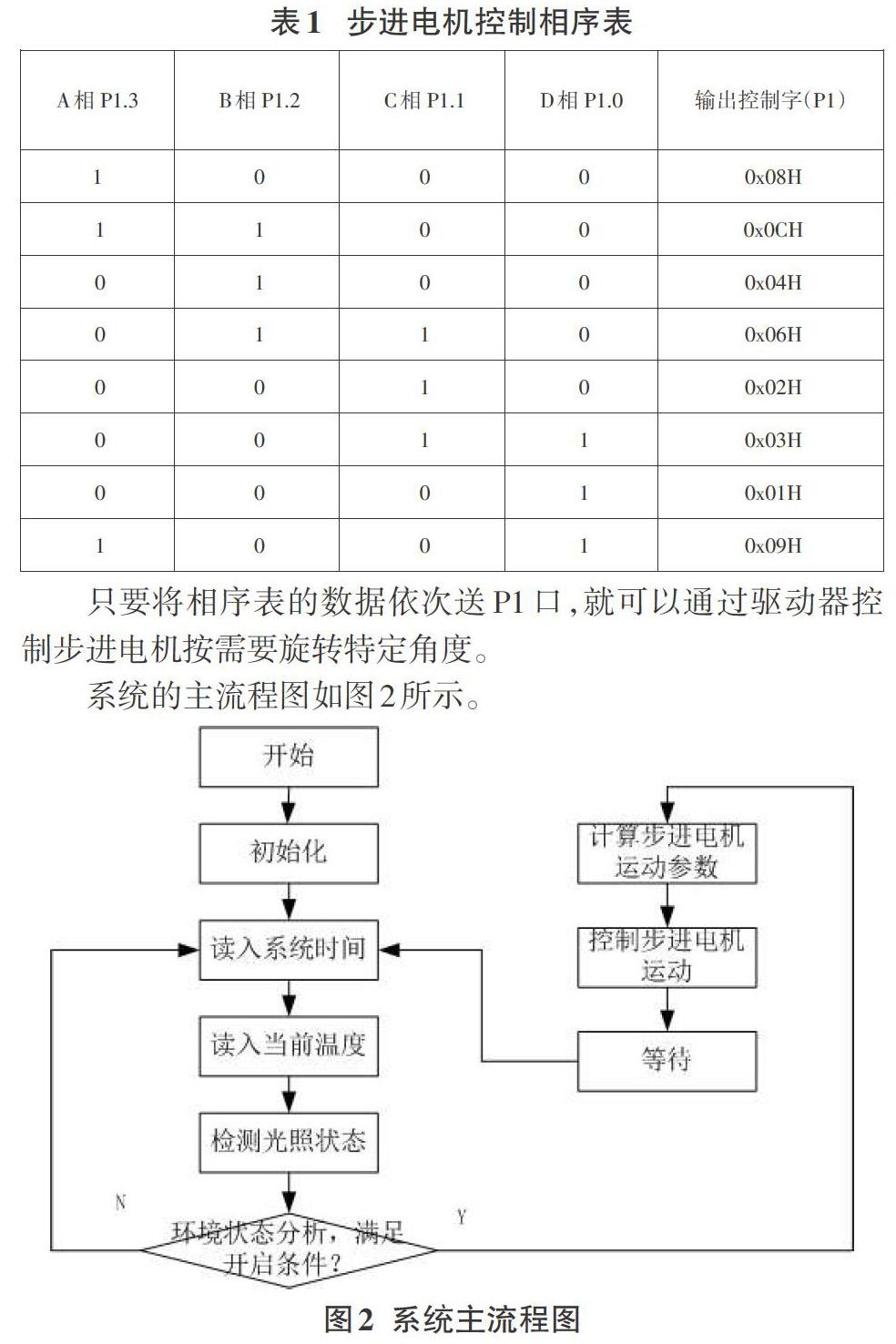
步进电机是本次控制系统的执行机构,在控制时需要连接A、B、C、D根相线,通过改变相线上的控制电平控制步进电机按相序旋转一个角度。当A相连接P1.3,B相连接P1.2,C相连接P1.1,D相连接P1.0时,步进电机的相序表如表1所示:
只要将相序表的数据依次送P1口,就可以通过驱动器控制步进电机按需要旋转特定角度。
系统的主流程图如图2所示。
在系统初始化中,主要完成外部时钟、温度传感器和内部ADC的初始化。其中在完成DS18B20初始化时,由于传感器需要一个加热时间来进入正常工况,为保证数据的准确性,可以适当增加延时约1分钟以供预热,同时舍弃前30-50组信号以确保数值的可信度。考虑到温度是一个变化相当缓慢,具有较大滞后性的物理量,为降低处理器工作负荷和节约能源,可以适当延长采样周期,比如按5分钟的间隔读取温度值。每次读取时需要连续读取10次,然后采用算术平均滤波法计算出当前温度以供环境状态分析函数分析。当满足增氧泵开启条件后,系统会根据温度信息自动计算步进电机运动参数,并指挥步进电机工作到位,确保增氧泵以一定的出气量水平工作。为确保系统可靠性,还可以在程序设计中使用软件定时器(“看门狗”),定时时间可设置为最大允许值,同时在主函数和定时器函数中嵌入冗余代码和软件陷阱,形成嵌套式监测,确保系统能够长期、安全、可靠运行。
4 总结与改进
水族箱增氧泵加入了智能控制系统后,可与智能水族箱形成一个更为完整的网络,可以将水族箱环境因子控制更加精细化,同时具有节能、降噪等效果。如用户资金充裕且水族箱控制要求较高时,还可以在系统中增加溶氧量檢测传感器。这样可以将原系统从开环系统转变为闭环系统;也可以将观赏鱼养殖方面的经验利用模糊控制或者专家系统方式进行提炼和代码化,这些措施均可进一步提高溶氧量控制精度,提高控制系统的适应能力。类似的设计对农业领域大规模珍贵鱼类养殖也有借鉴意义。
参考文献:
[1]何鹏,王尧,胡纯纯,等.基于Wi-Fi技术的水族箱自动控制系统设计[J].科技视界,2019(24):33-35.
[2]王科峰.水产养殖中叶轮式增氧泵智能控制及报警电路解决方案[J].科技创新导报,2017(9):65-66.
[3]单慧勇,于镓,田云臣,等.集成传感器清洁功能的水产养殖环境远程测控系统设计[J].湖北农业科学,2016(7):1825-1826.
【通联编辑:朱宝贵】
猜你喜欢
计算机教育(2016年10期)2016-12-19
求知导刊(2016年30期)2016-12-03
科学与财富(2016年28期)2016-10-14
