基于单片机的叉车电动助力转向系统的设计与实现
2020-12-12 04:01:46建东职业技术学院江苏常州市213000马鸿雁
石河子科技 2020年6期
(建东职业技术学院,江苏常州市,213000) 马鸿雁
电动助力转向系统(EPS)是一种直接依靠电机提供辅助扭矩的动力转向系统,系统由电动助力机直接提供转向助力[1]。与传统的液压动力转向系统相比,EPS 系统具有调整简单、装配灵活以及在多种状况下都能提供转向助力的优点,既节省能量,又保护环境,是叉车及汽车等转向系统的发展方向。本文在分析叉车电动助力转向系统工作过程的基础上,采用了PD 控制策略,设计了一种基于STC 单片机的电动助力转向系统,实际使用表明该系统具有良好的助力转向性能。
1 叉车电动助力转向系统的工作过程
当电动叉车方向盘转向时,转向传感器输出方向盘对应转动角度的模拟信号量,此模拟信号量送给电子控制器(ECU),控制器再综合由车速传感器送来的车速信号,并根据相应的控制策略确定一个控制PWM 的目标占空比值,控制电动机的转动方向与转速[2]。电动机的输出转矩通过减速机构等施加给转向输出轴,并经过齿轮齿条等转向机构的作用使车轮偏转一定的角度,从而起到对转向系统的助力作用。
2 系统结构和工作原理
系统主要由STC 单片机、信号采集电路、H 桥电机控制电路和系统保护电路等组成,其结构如图1 所示。控制器采集转矩信号和车速信号并送给STC 单片机。根据已定的控制规则,由系统确定一个目标值和电机转动的方向,并以PWM 调制的方式通过H 桥电路控制电机的运行状态。同时,系统对电机的输出电流进行采样,一方面将采样结果与目标电流相比较,用以对电机进行控制;另一方面结合车速信号,用以对系统的过流保护[3]。当电机电流大于设定值或车速高于设定值时,为了保护电机和系统的安全,控制器将对继电器发出一个控制信号,断开电机电源,停止助力,待系统正常后,再恢复助力功能。
3 控制器的设计
控制器以STC12C5A60S2 为核心处理器,其集成了丰富的硬件资源,包括A/D 转换电路和PWM 使得电路设计大为简化,提高了系统的可靠性,同时也为系统将来的扩展和升级留有一定余地。方向控制信号和PWM 信号相结合,加载到H桥驱动电路,控制电机的运行状态。脉宽调制方式采用单极性PWM,使用HIP4082 芯片避免了MOS 管直通的可能性,不仅可靠,脉宽占空比PWM 也易于调整和控制。
3.1 电机控制电路
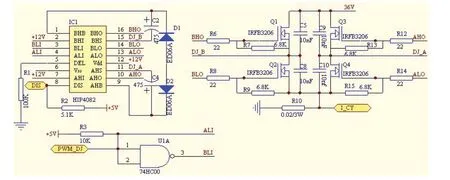
图1 电机控制电路图
电机的控制电路由方向控制电路和MOSFET H 桥电机驱动电路组成。图1 是电机控制电路图,单片机输出的PWM 信号与74HC00 与非门组成,生成占空比相同、极性相反的2 路信号至H 桥芯片HIP4082 的ALI 与BLI,DIS 为过流保护输入信号,平时为低电平,当DIS 为高电平时4 路输出信号AHO、BHO、ALO 和BLO 均为低电平,使得H桥功率输出管Q1~Q4 截至,起到过流保护作用。HIP4082 的DEL 脚接电阻到地,起上下管导通转换的延时作用,确保在任何时刻H 桥上下管输出驱动信号不会同时导通,极大地提高了驱动管的工作可靠性。
3.2 A/D 数据的采集
STC12C5A60S2 采用1012 位主次逼近式模数转换器,输入电压范围为0~5.0V,转换分辨率为3.0V/1024=2.9mV。对于转矩传感器,其输出电压范围为1~4V,所以只需对信号进行低通滤波处理和分压处理。对于电机的采样电流,由于有正负区别,还应通过电平转换使其成为正电压。其电路如图2 所示中的AD_I 信号。
3.3 控制过程分析
当PWM 输出占空比为50%时,Q1 与Q4、Q2与Q3 导通的时间是相同的,加到电机两端M1 和M2 的正反向时间是相同的,即电机的正反向驱动力是一样的,这时电机静止不动;当PWM 输出占空比大于50%时,Q1 与Q4 导通的时间大于Q2 与Q3 导通的时间,加到电机正方向的力大于反方向的力,使电机正方向转动;当PWM 输出的占空比小于50%时,Q2 与Q3 的导通时间大于Q1 与Q4的导通时间,加到电机反方向的力大于正方向的力,使电机向反方向转动。
当叉车的方向盘转动时,带动传感器转动,同时输出转动角度的模拟信号。当方向转动0~180 度时,对应传感器输出的电压为1~3.5V。这个电压值经分压后加到ARM 芯片的A/D 通道输入端,转换成相应的数字量,再转换成对应的转动角度ω1,控制PWM 的占空比大小,即控制电机的转动方向与转动速度。电机转动时,与其连接的编码传感器输出脉冲信号,这个脉冲信号反应了电机的转动速度与转过的角度,把编码传感器信号接入到LPC1752 对应的输入脚,通过程序就可以读出电机的转速与转过的角度ω2。把方向盘转动的角度ω1 与编码器读到的角度值ω2 相比较,如果ω1=ω2 表示叉车转动的角度与方向和方向盘的角度与方向值一致,则电机停止转动;当ω1>ω2 时,表示叉车转动的角度没有达到方向盘正方向转动的角度,控制电机继续向正方向转动,直到ω1=ω2 为止;当ω1<ω2 时,表示叉车转动的角度没有达到方向盘反向转动的角度,控制电机继续向反方向转动,直到ω1=ω2 为止。
3.4 过流保护的电路设计
图2 为过流保护电路,在H 桥驱动中,MOS 管与地之间接入电流采样电R10,R10 大小为20mΩ,电机保护电流值取10A,则R10 两端的最大电压为0.2V。R24 与C24 组成滤波电路,把脉冲电压转换成直流电压,经运算放大器U7A 放大后,输入到U7B 的反向输入端,其正向输入端的基准电压为4V。正常工作情况为U7B 的反向输入电压小于正向输入电压,U7B 输出电压为高,经74HC00 反 向 后 为 低 电 平,即DIS=0,H 桥 芯 片HIP4082 正常工作,电机正常运行;当电机电流大于10A 时,UR10 经U7A 放大20 倍后大于4V,即大于比较电路的正向基准电压4V,U7B 输出低电压,经74HC00 反向后为高电平,DIS=1,使得H 桥芯片停止工作,切断电机的驱动信号,停止助力,从而起到过流保护的作用。
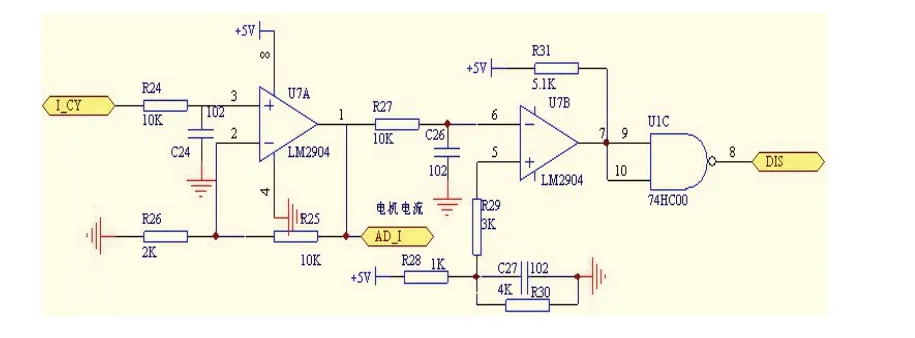
图2 过流保护电路
3.5 软件设计流程图
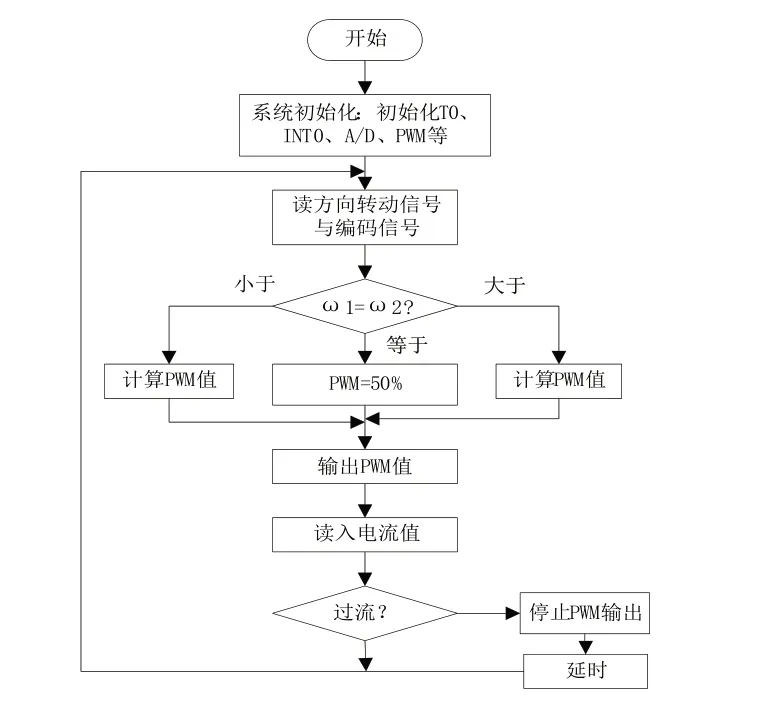
图3 软件控制流程图
图3 为软件控制流程图,T0 为0.1ms 定时器,作为时间基准,作用为确定当前电机的转动速度;外部中断0 为编码器的中断计数输入,对电机的编码器进行计数,确定当前叉车转动的角度;A/D将转动方向与电机电流的模拟值转换为对应的数字量,再转换成对应的转动角度与电机电流值;串口RS232 为信号输出口,把当前的运行状态输出,可以用PC 机接收并显示相关信息;PWM 信号作为电机的方向控制与速度控制信号,根据方向盘转动信号,电机当前的转动速度与电机电流值经PD 运算后,输出相应的PWM 值,控制电机的转动方向与转动速度,起到良好的跟踪作用。
4 系统控制策略与实现
国内外学者研究了不同的EPS 控制策略,如PID 控制[5-6]、H_∞鲁棒控制[7]、模糊控制[8]等。由于转矩信号和车速信号的输入特点非常适合采用模糊控制,而PD 控制则具有较好的控制性能,因而综合这两种方法的特点,本文采用了模糊PD 控制策略。其控制结构框图如图4 所示。
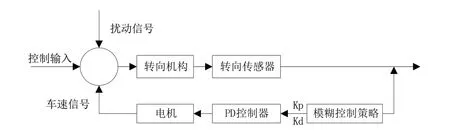
图4 系统控制策略图
系统输入为方向转动角度信号,Kp 为PD 控制的比例系数,Kd 为PD 的微分系数,模糊控制器通过对转矩传感器信号的采集,在线整定Kp、Kd参数,用于PD 控制,再由PD 控制来确定系统的目标电流。从实际的样机运行情况可以看出,采用该种控制策略,电动机输出角速度对方向盘输入信号有较好的跟踪性能,说明模糊PD 控制策略具有良好的助力效果。
5 结束语
本控制器是与杭州一企业合作开发的产品,目前样品已开发完成并投入使用,根据近一年的现场使用,运行稳定可靠、转向跟踪性能良好。证明其控制器性能指标达到用户要求。
猜你喜欢
英语世界(2022年9期)2022-10-18 01:11:18
中国储运(2022年6期)2022-06-18 10:29:00
中国特种设备安全(2021年12期)2021-04-26 14:37:06
能源工程(2020年6期)2021-01-26 00:55:22
金桥(2020年9期)2020-10-27 01:59:44
中学生数理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
商周刊(2017年17期)2017-09-08 13:08:58
广州大学学报(自然科学版)(2016年2期)2017-01-15 13:43:02