波浪入射角对单点系泊楔形波浪发电平台水平运动特性的影响*
2020-12-11 07:01郑松根何宏舟
海峡科学 2020年10期
郑松根 何宏舟 衡 伟
(1.厦门海洋职业技术学院,福建 厦门 361001;2.(集美大学)福建省能源清洁利用与开发重点实验室,福建 厦门 361021)
0 引言
波浪能发电对于海岛开发和海上用电具有十分重要的意义,发展潜力巨大[1]。振荡浮子式和摆板式波浪发电装置[2-4]是目前研究较为成熟、公认比较有应用前景的发电装置。根据浮子式和摆板式装置采能特点开发出来的楔形波浪发电平台(见图1),能够为浮摆式波浪发电装置提供良好的运行载体。

图1 楔形波浪发电平台
楔形波浪发电平台为艏部呈尖角形、尾部逐渐变宽的楔形平台。楔形平台的定位系统采用悬链线单点浮筒系泊[5],平台通过钢缆与系泊浮筒连接,浮筒通过锚链与海底锚固装置锚定,锚链采用三根对称辐射式布置,每两根锚链间静态水平夹角为120°,该系统适用于浅海系泊。按照设计要求,在该系泊系统作用下,楔形平台能够随着波浪方向的改变而围绕浮筒做圆周运动,且能随着风、浪、流载荷变化,自动调整至合力最小的位置;当风、流载荷较小时,平台艏向能调整至波浪载荷最大的位置,获得较佳的迎浪方向。这种调整一方面使得平台横向不需长时间抵抗波浪,提高了平台横向稳定性,同时可减轻锚链系泊力,有利于系泊系统长时间运行;另一方面,平台纵向迎浪,使得平台两侧的波浪收集装置能够同时工作,采能面积最大化,提高了波浪能量收集效率。
本文以楔形平台及其系泊系统为研究对象建立仿真模型,通过AQWA对模型进行数值计算,得出楔形波浪发电平台在单点系泊条件下,平台的横荡、纵荡运动随入射波浪方向改变的变化情况,从而验证系泊条件下平台自动随浪调整的能力,找出平台运行的危险工况区间,再根据仿真结果分析平台的系泊运动特性和安全性能。
1 建模与参数设置
楔形平台尺寸:型长18m、型宽8m、型深2.4m、满载质量90517kg、吃水1.3m;浮筒尺寸:直径2.6m,高2.78m,浮筒及附属物质量7000kg,设计吃水1.5m;海水密度1025kg/m3。浮筒与平台连接钢缆长20m,直径26mm。有档锚链:型号AM2,公称直径40mm,抗拉强度895kN,空气中质量为35.04kg/m,单链长度57m。

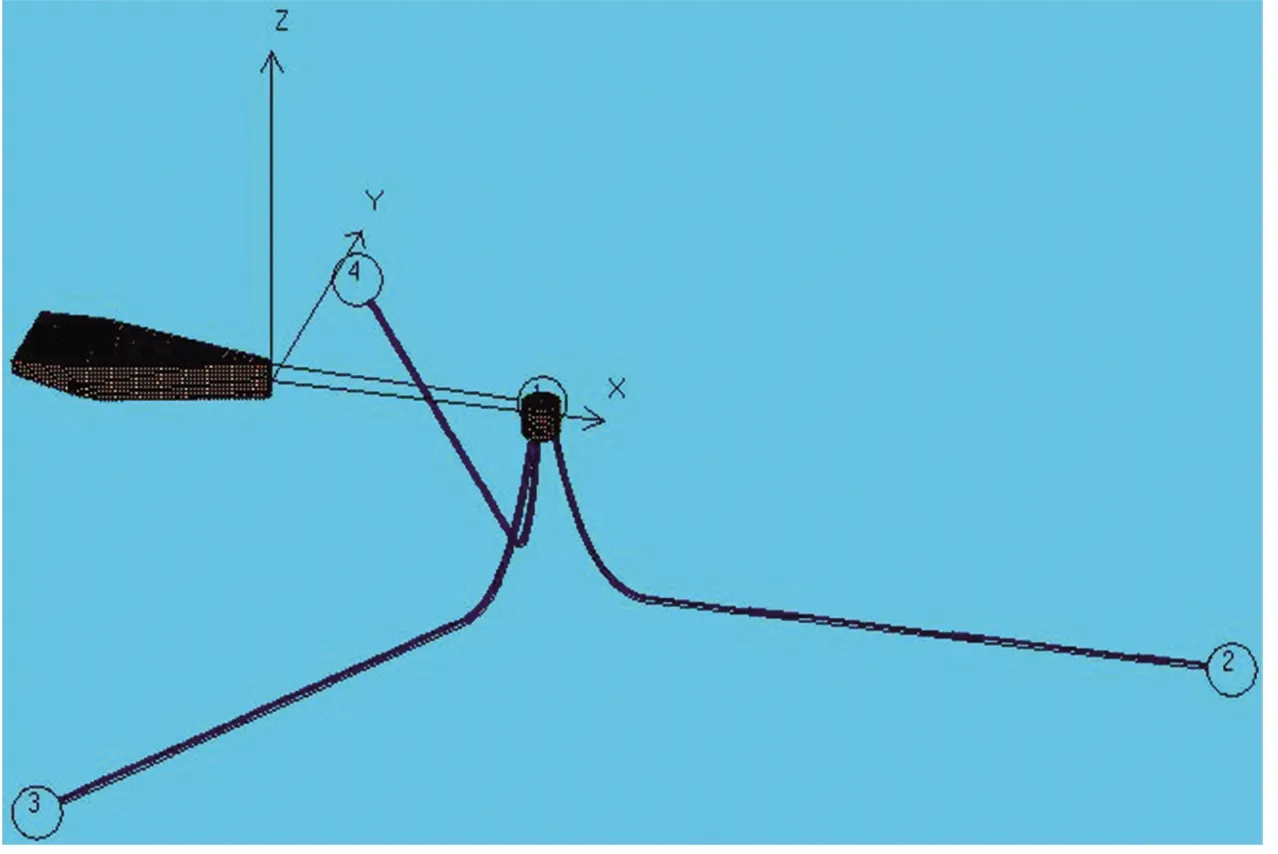
图2 平台仿真模型
2 楔形平台在不同波向下随波浪的水平运动响应
单点系泊的楔形发电平台受到某一方向的波浪冲击时,在水平面上会围绕浮筒做圆周飘荡运动,自动调整至最佳迎浪位置。在飘荡调整过程中,平台水平运动主要有横荡和纵荡,横荡是指平台在水平面上沿着平台横向的左右移动,纵荡是指平台在水平面上沿着平台纵向的前后移动。
在不同的波浪入射角度(x轴负向沿逆时针至波浪入射方向间的夹角)下,平台从初始静止位置调整至稳定位置会有不同的水平运动响应。本文根据波浪发电平台运行海域额定波况:周期4s、波高1m,设置预张力为6.7kN,分别计算入射角为15°、30°、45°、60°、75°、90°时的平台横荡、纵荡运动参数。经过数值计算,平台在600s内的横荡与纵荡情况如图3所示,各子图中横轴表示时间,纵轴表示位移,各图上方红线曲线为横荡,下方黑色曲线为纵荡。

(a)15°(b)30°(c)45°
2.1 平台横荡响应分析
2.1.1 仿真结果总体分析
由图3可见,楔形平台横荡曲线是由大周期运动和小周期运动构成的复杂运动曲线,一方面发生类似正弦波的大周期、大振幅的波动,另一方面又发生着随波浪周期变化的小周期、小振幅的波动。可见,平台在周期波浪力作用下,发生随波浪频率变化的小周期、小振幅横荡运动(下文称横荡运动);在波浪力持续作用下,还进行着大周期、大振幅的横向漂荡调整运动(下文称横漂运动)。综合各图可见,大周期横漂运动,随着运行时间增长,波动幅度和周期逐渐减弱,且曲线波动中心跟随波浪入射方向逐渐发生偏移,最后在相对稳定的范围内进行弱周期弱振幅的横漂运动。小周期横荡运动则贯穿整个横荡运动始终,横荡运动的周期约为4s,与波浪周期基本一致。
2.1.2 各波浪工况分析
(1)15°波浪入射角工况如图3(a)所示。平台首先向左舷偏移13m,经历第一个周期(100s)后,横漂振幅迅速减弱,周期缩短为80s。在第3个横漂周期(约200s)后,横漂中心往左舷方向横移至离初始位置2m处趋于稳定。稳定后的平台持续在做一个周期大约为80s、振幅为1.4m的横漂运动。此外,平台自始至终都在进行周期4s和振幅0.28m的小周期横荡运动,形成大周期横漂包含小周期横荡的复杂横向漂荡运动。平台横漂运动在0~100s最为剧烈,最大横漂速度达到0.23m/s;调整稳定后,平台的横漂速度约为0.07m/s,横荡速度约为0.28m/s,调整后,横向最大运动速度达到0.35m/s。
综上,在周期4s、波高1m、入射角15°的持续波浪条件下,本楔形平台可随波浪入射方向调整工作位置至最佳迎浪方向,大约历时200s向左舷方向调整2m,随后稳定在该位置进行小振幅横漂和横荡运动。
(2)30°波浪入射角工况如图3(b)所示。平台首先向左舷偏移18m,经历第一个周期(约100s)后横漂振幅大幅衰减,周期缩短为80s。在第三个周期(200s)内,平台横漂中心调整至左舷方向12m处达到稳定状态。稳定后的平台持续在做周期为80s、振幅约为1.5m大周期横漂运动。跟随波浪频率的小周期横荡伴随大周期横漂运动始终,其周期为4s、振幅为0.35m。平台横漂运动在0~100s最为剧烈,最大横漂速度达到0.42m/s;调整稳定后,平台的横漂速度约为0.08m/s;横荡速度约为0.35m/s,调整后横向最大运动速度达到0.43m/s。
综上,在入射角30°的持续波浪条件下,楔形平台大约历时200s调整至距离左舷12m处的最佳迎浪工作位置,并基本稳定在该位置进行小振幅横荡运动。
(3)45°波浪入射角条件工况如图3(c)所示。平台首先向左舷横漂25m,经历第一个周期(约120s)后,横漂振幅大幅衰减。第二个周期缩短为100s,第三个周期缩短为80s。在第三个周期(约200s)内,平台横漂中心往左舷方向调整22m到达新的工作位置,并趋于稳定。稳定后的平台持续在做周期为80s、振幅约为2m的大周期横漂运动。小周期横荡伴随大周期横漂运动始终,其周期4s、振幅为0.40m。平台横漂运动在0~100s最为剧烈,最大横漂速度达到0.39m/s;调整稳定后,平台的横漂速度约为0.1m/s;横荡速度约为0.4m/s,调整后横向最大运动速度达到0.5m/s。在入射角45°的持续波浪条件下,楔形平台大约历时200s调整至距离左舷22m处的新平衡工作位置,并基本稳定在该位置进行小振幅横漂和横荡运动。
(4)60°波浪入射角工况如图3(d)所示。平台首先向左横漂26m,经历第一个周期(约90s)后,横漂振幅迅速减弱,波动周期缩短为80s。在第三个周期(约200s)内,平台横漂中心往左舷方向调整23m达到新的稳定工作位置。稳定后的平台持续在做振幅为0.55m的小周期横荡运动。虽然稳定后的平台仍然在做平均振幅1.5m、周期60~80s的大周期横漂运动,但横漂运动与横荡运动的界限变得不明显。平台横漂运动在0~100s最为剧烈,最大横漂速度达到0.46m/s;调整稳定后,平台的横漂速度约为0.07m/s,横荡速度约为0.55m/s,调整后横向最大运动速度0.62m/s。
在入射角60°的持续波浪条件下,楔形平台大约历时200s调整至距离左舷23m处的新平衡工作位置,并稳定在该位置进行小幅横荡运动。
(5)75°波浪入射角工况如图3(e)所示。平台首先历时80s向左横漂29m,之后再经历80s小幅调整后,进入横漂与横荡并存的稳定状态。稳定后,横漂中心调整至距离初始船中左侧28m位置,横漂运动周期大幅缩短为25s,平均振幅为0.9m。小周期横荡运动振幅0.55m。平台横漂运动在0~100s最为剧烈,最大横漂速度达到0.43m/s;调整稳定后,平台的横漂速度约为0.14m/s,横荡速度约为0.55m/s,调整后横向最大运动速度0.69m/s。
在入射角75°的持续波浪条件下,楔形平台大约历时160s调整至距离左舷28m处的新平衡工作位置,并稳定在该位置进行小幅横荡运动。
(6)90°波浪入射角工况如图3(f)所示。平台历时100s向左横漂30m后便进入稳定状态。稳定后,大周期横漂运动基本消失,能观察到小周期横荡形成的振荡带。此时,横荡中心偏离初始位置左侧横向距离为29m,横荡周期4s,振幅0.55m。平台横漂运动在0~100s最为剧烈,最大横漂速度达到0.30m/s;调整稳定后,平台的横漂运动消失,横荡速度约为0.55m/s,调整后横向最大运动速度0.55m/s。
在入射角90°的持续波浪条件下,楔形平台大约历时100s调整至距离左舷29m处的新平衡工作位置,横漂运动消失,平台稳定在该位置进行小幅横荡运动。
2.2 平台纵荡响应分析
(1)15°波浪入射角工况。平台纵向飘荡运动也是由大周期、大振幅的纵漂运动和小振幅小周期的纵荡运动复合而成。纵漂运动方面,平台在波浪作用下,首先向尾部漂移3m,随后在系泊钢缆拉拽下开始向首部漂移,第一个周期纵向漂移量达最大值5.5m。之后平台进入振幅逐渐减小的纵漂运动,大约在3个周期(约200s),平台纵漂运动趋于稳定。纵荡运动方面,纵荡波动带由细变粗,纵荡周期基本维持4s,纵荡振幅则由小到大,大约在200s左右达到稳定值0.6m。平台纵漂运动在0~100s最为剧烈,最大纵漂速度达到0.15m/s;调整稳定后,平台的纵漂运动不明显,纵荡速度约为0.60m/s,调整后纵向最大运动速度0.6m/s。
(2)30°波浪入射角工况。平台纵向水平运动依然是纵漂和纵荡运动复合而成。纵漂运动方面,平台首先向尾部漂移2.5m,随后在第一个周期内向前最大漂移12m;第二个周期开始振幅迅速衰减,在第3个周期(约200s),纵漂运动趋于稳定,稳定后纵漂周期90s,平均振幅为3m。纵荡运动方面,纵荡波动带由细变粗,纵荡周期基本维持4s,纵荡振幅则由小到大,大约在200s左右振幅达到稳定值0.55m。平台纵漂运动在0~100s最为剧烈,最大纵漂速度达到0.44m/s;调整稳定后,平台的纵漂速度为0.13m/s,纵荡速度约为0.55m/s,调整后纵向最大运动速度0.68m/s。
(3)45°波浪入射角工况。平台纵向水平运动依然是纵漂和纵荡运动复合而成。纵漂运动方面,平台首先向尾部漂移3m,随后在第一个周期内向前最大漂移16m;第二个周期开始振幅迅速衰减,240s左右,纵漂运动趋于稳定,稳定后纵漂周期80s,平均振幅为4.5m。纵荡运动方面,纵荡波动带由细变粗,纵荡周期基本维持4s,纵荡振幅则由小到大,大约在200s左右振幅达到稳定值0.45m。平台纵漂运动在0~100s最为剧烈,最大纵漂速度达到0.30m/s;调整稳定后,平台的纵漂速度为0.22m/s,纵荡速度约为0.45m/s,平台纵向最大运动速度0.67m/s。
(4)60°波浪入射角工况。平台纵向水平运动包括纵漂和纵荡两种运动。纵漂运动方面,平台首先向尾部漂移1.5m,随后在第一个周期内向前最大漂移20m;第二个周期开始振幅迅速衰减,200s左右,纵漂运动趋于稳定,稳定后纵漂周期80s,平均振幅为3.5m。纵荡运动方面,纵荡波动带波动周期4s,纵荡振幅基本维持在稳定值0.3m。平台纵漂运动在0~100s最为剧烈,最大纵漂速度达到0.5m/s;调整稳定后,平台的纵漂速度为0.18m/s,纵荡速度约为0.30m/s,调整后纵向最大运动速度0.48m/s。
(5)75°波浪入射角工况。平台纵向水平运动包括纵漂和纵荡两种运动。纵漂运动方面,平台首先向尾部漂移1.5m,随后在第一个周期内向前最大漂移23m;第二个周期开始振幅迅速衰减,200s左右,纵漂运动趋于稳定,稳定后纵漂周期80s,平均振幅为1.7m。纵荡运动方面,纵荡波动带波动周期4s,纵荡振幅0.2m。平台纵漂运动在0~100s最为剧烈,最大纵漂速度达到0.58m/s;调整稳定后,平台的纵漂速度为0.09m/s,纵荡速度约为0.20m/s,调整后纵向最大运动速度0.29m/s。
(6)90°波浪入射角工况。平台纵向水平运动包括纵漂和纵荡两种运动。纵漂运动方面,平台首先向尾部漂移1.5m,随后向前最大漂移值达25m;第二个周期开始振幅迅速衰减,200s左右,纵漂运动趋于稳定,稳定后纵漂周期80s,平均振幅为2.4m。纵荡运动方面,纵荡波动带波动周期4s,纵荡振幅0.15m。平台纵漂运动在0~100s最为剧烈,最大纵漂速度达到0.37m/s;调整稳定后,平台的纵漂速度为0.12m/s,纵荡速度约为0.15m/s,调整后纵向最大运动速度0.27m/s。
3 水平运动响应综合分析
根据上文仿真结果可知,在分析不同工况下水平运动响应时,主要考虑4个方面的参数:横漂、纵漂运动趋于稳定的时间,横漂、纵漂最大漂移量,调整稳定后各项运动的振幅,水平运动最大速度。
(1)横漂达到稳定所需时间,15°~60°入射角时均为200s,75°为160s,90°为100s。纵漂达到稳定所需时间,15°~90°入射角均为200s。可见,中小角度入射角变化对横漂稳定时间影响不大,大角度入射则会显著缩短横漂稳定时间;而波浪入射角度的变化对于纵漂运动达到稳定的时间没有明显影响,都是在第3个周期时达到稳定。
(2)横、纵漂最大漂移量与入射角度的关系如图4所示,横漂与纵漂的最大偏移量均随着波浪入射角度的增大而增大,横漂(黑线)的漂移量整体要大于纵漂(红线)的偏移量,原因是由于系泊钢缆对纵向运动的限制大于对横向运动的限制。

图4 最大漂移量与入射角关系
(3)横漂、纵漂、横荡、纵荡运动稳定后的振幅与入射角的关系如图5所示。平台运动趋于稳定后,横漂与纵漂运动的振幅均随着入射角度增大呈现先增大后减小的趋势,横、纵漂振幅在30°~45°之间达到最大值。横荡振幅呈现由小变大而后趋于稳定值的变化特点,而纵荡振幅则呈现由小变大并逐渐趋于稳定的特性。

图5 振幅与入射角关系
(4)平台调整(0~100s)过程中,对于各种入射角工况,横漂运动最大速度出现在60°入射角时,大小为0.46m/s,纵漂运动最大速度出现在75°入射角时,大小为0.58m/s。平台调整稳定后,对于各种入射角工况,横向运动最大速度出现在75°入射角时,大小为0.69m/s,纵向运动最大速度出现在30°入射角时为0.68m/s。由于平台横向尺寸(型宽)为8m,纵向尺寸(型长)为18m,则平台横向最大速度相对于型宽的比值为0.086,纵向最大速度相对于型长比值为0.038,总体比值都小于0.1,平台的横向速度与纵向速度相对于平台尺寸均较为缓慢,这种缓慢的水平运动对平台不构成危害。因此,平台水平运动稳定性符合要求,且纵向的运动稳定性要高于横向运动稳定性。
4 结论
给定锚链预张力和额定波况条件下,采用单点浮筒系泊的楔形平台能够随波浪方向自行调整工作位置至最佳迎浪方向,平台调整过程中,除了随波浪周期做横荡、纵荡运动外,还伴随振幅较大的横漂、纵漂运动。
平台横向调整所需时间在中小波浪入射角时大约为200s,在大角度入射时缩短至100s;而纵向调整所需时间则稳定在200s左右。波浪入射角30°~60°时,横漂、纵漂的振幅均达到最大值,平均运动速度亦达到最大值,平台漂移量大,此类工况最为考验系泊系统的系泊能力,为平台运行的危险工况。根据仿真结果,系泊系统有效限制了平台更大幅度的漂移运动,即使在
危险入射角度下,平台也能平稳运行,没有发生断链事故,表明该单点系泊系统的安全性符合要求。
从“集大1号”实船在长达9个月的运行数据来看,平台上的装置和设备未因水平运动过于剧烈而发生破坏或故障的现象,人站在平台上也不会因平台水平位移而感到不适,表明平台水平运动对于工作人员和设备危害性不大,水平运动的稳定性是符合要求的。因此,系泊系统与平台的配合较好,使得平台的水平运动性能良好,发电装置的工作性能与安全得到可靠保障。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
山东冶金(2022年2期)2022-08-08
客联(2022年3期)2022-05-31
现代仪器与医疗(2021年4期)2021-11-05
教育周报·教研版(2021年14期)2021-06-20
考试与评价·高二版(2020年1期)2020-09-10
物理通报(2020年2期)2020-05-18
阅读与作文(英语高中版)(2019年8期)2019-08-27
中学数学研究(广东)(2019年12期)2019-07-18
弹箭与制导学报(2018年3期)2018-08-28