
基于全自动运行的智能站台门控制系统研究
2020-12-08 07:46左艳芳郭顺利王振欣
铁路计算机应用 2020年11期
李 帅,左艳芳,郭顺利,王振欣
(1. 中国铁道科学研究院集团有限公司 电子计算技术研究所,北京 100081;2. 北京经纬信息技术有限公司,北京 100081)
站台门是城市轨道交通中,保障乘客安全、改善候车环境的重要设施,已在城市轨道交通中取得广泛应用。在全自动运行线路中,引入了许多新的应用场景,对站台门控制系统也提出了新的需求。之前对于全自动运行线路中站台门控制系统的研究,提到的多组就地控制盘(PSL,Platform Screen doors Local control panel)应用[1]、障碍物探测[2]、间隙探测[3]等多种研究成果,其实已在人工驾驶线路中取得了普遍应用,在全自动运行线路中并无重大变化。而基于图像识别的障碍物探测技术[4],并未在全自动运行线路中取得广泛应用。其实,全自动运行线路中,站台门控制系统新增的两项关键需求,是对位隔离功能和达到SIL2 级别的高可靠性和高安全性运行。之前的研究多是针对全自动运行模式下,站台门新增系统需求的探讨和论证,并未给出具体的解决方案。本文根据行业研究成果,结合项目应用情况,针对全自动运行模式下站台门的新增需求,设计研发一套满足功能和性能要求的智能站台门控制系统:实现了对位隔离功能,支持多种列车车型的不同开关门控制方式,符合SIL2 的相关要求,满足全自动运行线路的需求。
1 全自动运行场景下的新增需求
1.1 对位隔离
当前的城市轨道交通人工驾驶线路中,当单个站台门或列车门发生故障无法打开时,其对应的列车门或站台门无法获知对方运行状态,依然会打开。这就造成站台门或列车门只有一方打开,而另一方不打开的问题,可能引起乘客撞伤、挤伤、物品掉落到轨行区等危险事故发生。若因为单个列车门或站台门无法动作,而让整侧站台门或列车门停止使用,对线路运行影响过大。尤其在全自动运行线路中,站台候车区域配备值守人员较少,特别需要在单个站台门或列车门故障时,能让其对应列车门或站台门不打开,同时不影响其它正常站台门和列车门打开,即对位隔离[5],以此提高系统自动化运行程度,减少运营人员劳动量,降低人力成本。
1.2 安全完整性等级
EN50126[6]、 EN50128[7]、 EN50129[8]3 项 标 准,是由欧洲电气化标准委员会制定,以计算机控制的信号系统作为对象的铁道信号标准,对轨道交通安全相关的电子系统及软件的可靠性、可用性、可维护性和安全性提出了具体要求,并给出规定和示例来描述相关的评估活动和评估方式。目前轨道交通行业均以此3 项标准为依据,对站台门控制系统进行安全评估。
目前,在全自动运行线路中,上海地铁10 号线和北京地铁燕房线、北京大兴机场线均将SIL2 认证作为站台门控制系统交付的条件[2],而新建的全自动运行线路中,SIL2 认证已成为必备的投标资质。目前,我国正在运营的全自动驾驶线路均在站台设有站务人员值守,对站台门控制系统的运营情况进行监控和管理。随着运营组织要求的不断提高,实现站台无人监管将成为必然趋势[9]。因此,对站台门控制系统进行全生命周期的可靠性、可用性、可维护性和安全性(RAMS,Reliability, Aviliailability, Maintainability, Safety)管理。
2 功能实现
2.1 架构设计
如图1 所示,站台门控制系统由多个门机控制单元(DCU,Door Control Unit)、2 套单元控制器(PEDC,Platform Emergency Door Controller)、两台工控机(运行有监控软件)组成。其中,2 套PEDC 分别由可编程逻辑控制器(PLC, Programmable Logic Controller)和继电器模组构成,分别控制上行和下行的DCU,并采集每个DCU 的运行状态,即每个站台门的状态;将状态信息整合汇总后,通过交换机发送给两台工控机(工控机A 和B)。2 台工控机分别通过两条通信链路与列车自动运行(ATO,Automatic Train Operation)系统进行通信,交换每个列车门和每个站台门的状态信息。
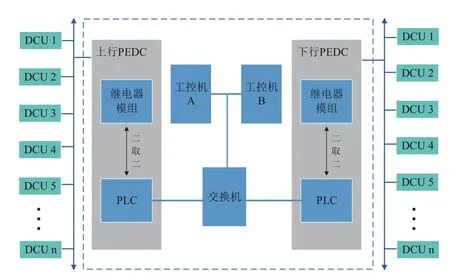
图1 站台门控制系统架构
站台门控制系统和ATO 系统通过网络接口实现双向、实时通信,向对方传输自身状态信息的同时,也要接收对方的状态信息,并据此控制自身设备,实现站台门和列车门的对位隔离。
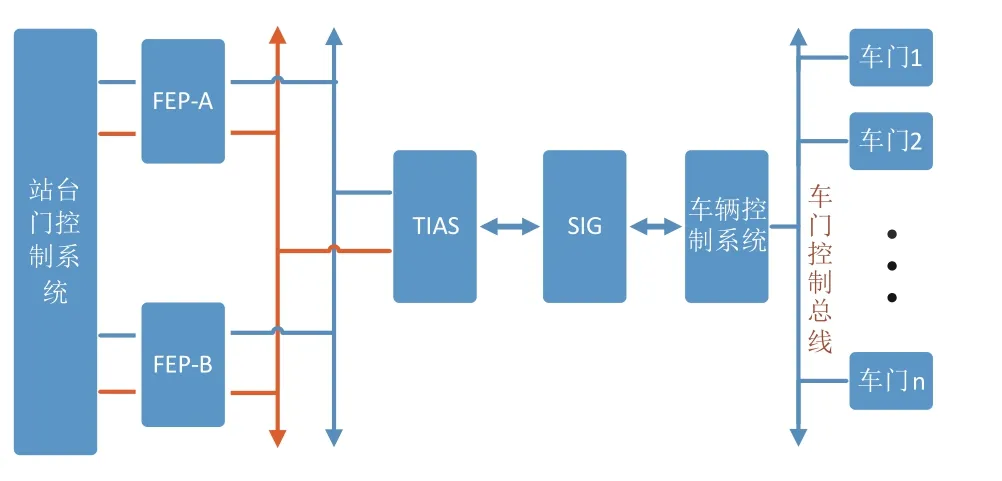
图2 对位隔离方案示意
如图2 所示,列车门信息通过车辆控制系统传输给信号系统,再经过行车综合自动化系统(TIAS,Traffic control Integrated Automation System)和2 台前端机FEP-A 和FEP-B 发送给站台门控制系统的2台工控机,工控机接收到列车门状态信息后,判断每个列车门的状态,并据此控制站台门实现对未隔离。同时,DCU 可通过声光警报等方式提示站台候车的乘客,该站台门处于对位隔离状态,需要通过其它站台门上车。同理,处于对位隔离状态的列车门也不打开,并提示车上乘客通过其它列车门下车。
2.2 工作流程
如图3 所示,站台门控制系统在完成系统初始化工作后,开始数据发送和数据接收2 项工作,2 项工作相互独立,互不影响。
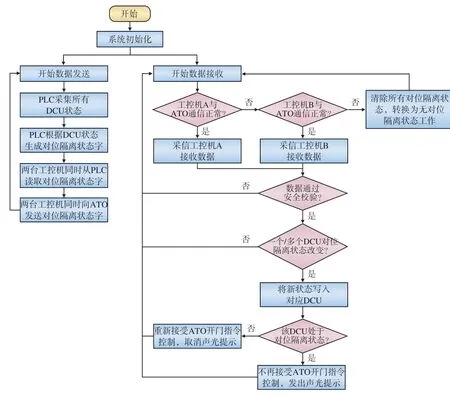
图3 对位隔离工作流程
2.2.1 数据发送
在数据发送过程中,站台门控制系统中的PLC会周期性(每隔0.5 s)采集每个DCU 的运行状态,站台门控制系统中某个站台门故障或隔离时,该站台门对应的DCU 将其故障或隔离信息上传给PLC,PLC 则根据每个DCU 的状态,生成站台门对位隔离状态字,将其传输给工控机A 和工控机B。2 台工控机上均运行一套监控软件,负责与ATO 系统进行通信,将PLC 发送过来的站台门对位隔离状态字发送给ATO。该状态信息可供ATO 判断当前的站台门状态,并根据当前站台门状态,控制与故障或隔离的站台门相对应的列车门不再打开,而其它列车门正常打开。
2.2.2 数据接收
在数据接收流程中,站台门控制系统中的2 台工控机,能够同时接收信号系统发来的列车门状态信息,将该信息传输给PLC。PLC 会对来自2 台工控机的数据进行智能判断,先判断工控机A 是否正常工作,若正常,则采信工控机A 中的列车门状态数据;若工控机A 发生故障,则判断工控机B 是否正常工作,若其正常工作,则使用工控机B 中的列车门状态数据;若工控机B 也发生故障,则清除所有站台门的对位隔离信息,将站台门系统置于没有对位隔离的状态运行,以此保证对位隔离失效后,不会对站台门系统本身的控制逻辑产生不利影响。
在确定状态数据来源之后,站台门控制系统会对接收的报文进行安全校验,在应用层采用双重CRC 校验,保障报文传输的完整性和正确性;同时,对数据发送方的IP 地址和身份标识进行双重认证,保证对方身份合法性。站台门控制系统仅对通过安全校验的报文进行解析。
当前数据通过安全校验后,站台门控制系统从中解析出当前的列车门状态,并将其与上一条接收到的报文进行对比,当某个或多个列车门的对位隔离状态发生变化时,则将其对位隔离信息发送给对应的DCU。
DCU 在接收到开门指令时(来自ATO 系统和PSL 的硬线指令),会对自身对位隔离状态进行智能判断:若其没有处于对位隔离状态,则正常打开站台门;若处于对位隔离状态,则不执行开门指令,并发出声光报警提示乘客从其它站台门上下车。
3 高可靠性控制系统方案
3.1 二取二冗余架构PEDC
如图4 所示,为提高站台门控制系统的可靠性,本文所述站台门控制系统使用PLC 和继电器模组构成的异构“二取二”架构,两者同时运行,同时接收ATO 系统的开、关门指令,进行逻辑判断后生成发送给DCU 的控制命令,仅当两者输出的控制命令一致时,才向DCU 输出开门或关门命令。该方案采用不同的处理方式对同一指令进行逻辑判断,并对判断结果进行二取二操作,极大降低单点故障对站台门控制系统运行产生的不利影响,提高系统的可靠性、可用性。
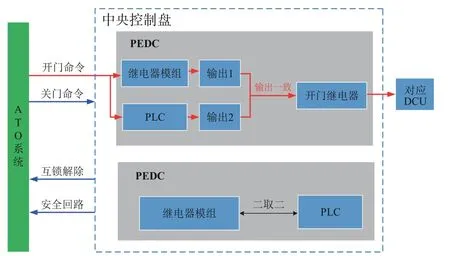
图4 二取二系统架构
3.2 冗余控制和通信链路
3.2.1 监控主机与TIAS 通信冗余
监控主机与TIAS 之间采用工业以太网连接,其中,监控主机作为从站响应TIAS 的数据读写请求。监控主机提供两套独立的接口程序,共用一套寄存器组提供相同的服务,TIAS 可以访问任何一套接口获取服务,当其中一条通信线路出现故障时,由TIAS 负责切换通道。
3.2.2 PEDC 与DCU 通信冗余
PEDC 与DCU 之间采用双MODBUS 总线冗余方式进行通信,正常运营时,由一条总线与每个DCU 交互信息,另一条总线处于热备状态。PEDC对两条总线的运行状态进行实时监测,并智能选择可用链路:当运行中的总线发生故障,如总线堵塞、断线等状况时,PEDC 选取另一条总线来代替故障总线,负责与每一个DCU 通信。保障信息传输的实时性、准确性,降低安全隐患,保障运营安全。
3.2.3 PEDC 与DCU 硬线控制线缆冗余
PEDC 和DCU 之间的控制线缆采用环形接线方式,从PEDC 引出后,将每个DCU 串行连接后,再次回到PEDC,控制指令可以通过环形线缆两端中的任意一端传送给DCU,当控缆的某一处断开时,不影响控制命令下发至每个DCU,不影响站台门控制系统的正常运行。
4 多车型智能控制
国内有些轨道交通线路中,存在多种车型同时运行的问题,每种车型的列车门数量和位置均不相同,这就要求站台门控制系统根据不同车型的列车门位置,提供相应的控制方式[10]。为此,本方案还能通过配置PEDC 和DCU 之间的控制线缆接口,实现多种开门方式的控制。收到车型信息和开门指令时,PEDC 对相关信息进行智能分析后,控制相应的开门继电器,向对应的一组DCU 发送开门命令。
如图5 所示,当开门继电器1 被驱动后,DCU1 ~DCU7 通过红色控制线路接收到开门命令,执行开门动作。当开门继电器2 被驱动后,DCU8 ~DCU14 通过蓝色控制线路接收到开门命令,执行开门动作。PEDC 还可以同时驱动开门继电器1 和开门继电器2,则所有DCU 均会收到开门命令,整侧站台门全部打开。通过PEDC 和DCU 之间接口的灵活配置,可以实现多种开门方式的控制,适应多种车型列车混跑。
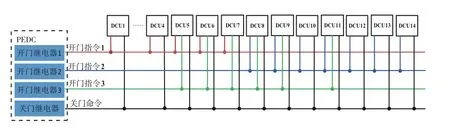
图5 多车型智能控制原理
5 结束语
本文对于全自动运行模式下,站台门控制系统新增的对位隔离和RAMS 要求,进行了深入的研究。在此基础上,设计并研发了一种智能站台门控制系统,实现全自动运行模式下站台门的对位隔离,将站台门自动控制级别延伸到单个站台门,提升了站台门智能化运行水平;通过“二取二”冗余架构及多重冗余措施,极大提高了系统的可靠性;同时还能支持多种车型混跑的运行场景,满足全自动运行线路对站台门控制系统的要求。该系统已成功应用于北京大兴机场线,自交付以来,运行安全可靠,RAM 指标超过预期水平,对全自动运行线路中的站台门控制系统的设计与应用,具有很好的借鉴意义。
猜你喜欢
天津音乐学院学报(2022年2期)2022-07-28
快乐语文(2021年15期)2021-06-15
珠江水运(2020年10期)2020-06-13
音乐研究(2019年5期)2019-11-22
电子制作(2019年15期)2019-08-27
故事大王(2019年4期)2019-05-14
北京航空航天大学学报(2017年9期)2017-12-18
艺术评论(2016年3期)2016-12-08
电脑知识与技术(2016年21期)2016-10-18
印刷技术·数字印艺(2015年7期)2015-08-31
