微波着舰引导设备动态校验系统设计与技术实现
2020-12-08 03:15谢洪森亓沂滨
计算机测量与控制 2020年11期
谢洪森,王 鼎,亓沂滨
(1.海军航空大学青岛校区,山东 青岛 266041; 2.中国人民解放军海军91001部队,北京 100841)
0 引言
在国内外军用民用航空导航领域中,为确保地面或舰面航空导航设备发射的无线电导航引导信号的完好性和准确性,需要对其发射的空中信号进行定期或不定期的检验,其中飞行校验是常用的也是最有效的技术手段[1]。目前,国内军民航陆基航空导航系统飞行校验技术和应用比较成熟,而对舰载航空导航系统的飞行校验方面研究还处于起步阶段,主要原因在于舰载航空导航设备安装环境处于运动状态,校验基准获取以及检验误差处理难度较大,对新型舰载航空导航设备检验系统构建提出了新的要求[2]。微波着舰引导系统是舰载对空导航系统的重要组成部分,在引导舰载机安全着舰过程中发挥着不可替代的作用。它主要由微波着舰引导设备(舰载)与机载设备组成,微波着舰引导设备主要用来发射包含角度(方位和仰角)、距离和数据等着舰引导信息,机载设备接收信号并进行处理,得到着舰所需的角度、距离和数据等引导信息[3]。从高精度基准获取技术入手,构建微波着舰引导设备动态校验系统,有效解决舰载航空导航系统快速动态飞行检验难题,对提高军事航空导航保障能力具有重大军事和现实意义。
1 动态校验系统总体结构
微波着舰引导系统是通过对舰载机相对舰船的精确位置信息的实时测量,为飞机提供准确的下滑着舰引导信息。微波着舰引导设备动态校验系统主要任务是实现对其导航引导性能进行飞行检验,其关键技术是建立一套精准度更高的相对位置基准和数据误差处理,通过测定数据的对比分析来有效判断设备的性能是否符合要求[4]。微波着舰引导设备动态校验系统由机载任务系统和舰载信息系统两大部分构成,如图1所示。
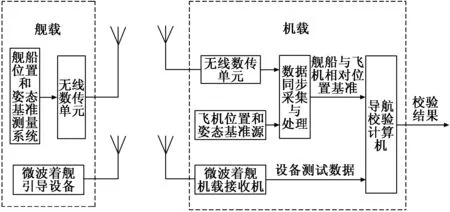
图1 动态校验总体结构框图
1.1 舰载信息系统
舰载信息系统主要包括高精度舰船位置和姿态信息基准测量系统与无线数传单元。舰船位置和姿态信息基准测量系统由GNSS接收机、舰船姿态信息处理单元和便携式维护计算机等组成,如图2所示。
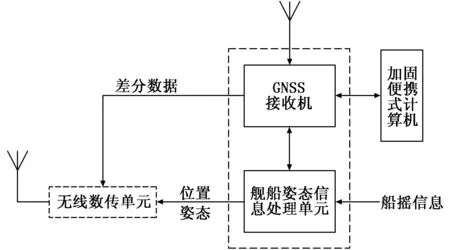
图2 舰船位置和姿态信息基准测量系统示意图
系统中的舰船姿态信息处理单元利用GNSS接收机和舰船的船摇信息实时计算出着舰跑道的真航向和设备天线相位中心的经度、纬度、高度信息。这些信息与差分数据一并通过无线数传单元传送给校验飞机的机载任务系统。
1.2 机载任务系统
机载任务系统主要包括微波着舰机载接收机、飞机位置和姿态信息基准源、数据同步采集处理单元、导航校验计算机与无线数传单元等。
任务系统通过其数据传输通道接收该舰船姿态数据,机上GNSS接收机实时测量飞机的动态经度、纬度和高度数据,同时利用差分链路接收舰面基准站的RTK数据,通过解算获得飞机相对微波着舰引导设备天线相位中心的方位、仰角和距离,并以此作为校验的基准。导航校验计算机在接收校验基准数据的同时,同步捕获微波着舰机载设备输出的方位、仰角和距离信息,并对一组同步数据进行对比,通过数字滤波和算法模型,获得微波着舰引导设备的校验数据[5]。
2 动态校验基准获取
微波着舰引导设备动态校验基本原理是将飞机飞行过程中通过机载接收机获取的位置信息与高精度空间基准数据进行对比,以此评估舰载设备性能的优劣,其中空间基准数据精度直接决定了动态校验系统有效性和可靠性。微波着舰引导系统本身就是一种高精度的着舰引导系统,对该系统进行动态校验的空间基准必须精度更高。校验基准方案采用移动基准站实时动态载波相位差分定位技术(MB-RTK),即建立在实时处理两个观测站的载波相位基础上的相对定位技术,基准站(舰载)通过数据链路实时将其载波观测值和原始定位信息一并传送给用户站(机载),利用相对定位原理将这些观测值进行差分,削弱和消除轨道误差、钟差、大气误差等影响,并对基线求解、解算载波相位差分改正值,然后解算出飞机相对舰船的精确位置信息[6]。
2.1 精度指标分析
根据飞行校验理论,校验精度(即校验基准精度)至少应为被校设备系统精度的3倍以上。根据国外同类着舰引导系统的精度要求,在着舰参考点处的方位测量误差折算成水平距离误差约为1.23 m(3σ),仰角测量误差折算成垂直距离误差约为1.35 m(3σ),那么对校验基准的要求应为:水平定位误差优于0.41 m,垂直定位误差优于0.45 m。
载波相位差分用户定位误差(CsrUNE)分为水平定位误差(CsrHNE)和垂直定位误差(CsrVNE),由用户观测几何精度因子(DOP值)和差分用户等效距离误差(CsrUERE)、置信概率(Pr)决定,在星座分布确定条件下,可将用户定位精度需求转化为伪距差分等效距离误差需求[7]。
按照载波相位差分水平定位精度0.41 m,垂直定位精度0.45 m(置信概率为99.7%限定)进行分解:
(1)
(2)
CsrUERE=min(CsrUEREH,CsrUEREV)=0.075 m
(3)
可知,载波相位差分用户等效距离误差要求为0.075 m。
2.2 基于移动基准站的高精度相对定位关键技术
基于移动基准站的高精度相对定位的关键技术主要包括周跳检测修复技术和整周模糊度求解技术。
2.2.1 周跳检测与修复技术
由于动态测量环境比较复杂,测量中会经常出现周跳现象。如果周跳不能及时发现并正确处理,将严重影响后续定位结果。通过查阅相关文献可知,周跳检测方法有很多种,如多项式拟合法、高次差方法、观测值估值残差方法、宽巷组合观测值法、无几何关系观测值法、TurboEdit方法、多普勒积分法等,这些检测方法与应用背景密切相关。为选择合适的检测方法,建立了不同方法的数学模型并通过实验验证,最终确定适合动态校验基准获取的周跳检测方法是联合使用多普勒积分法和TurboEdit方法。
目前周跳修复方法主要有TurboEdit方法和附加模糊度参数法。TurboEdit方法是利用前后历元的观测信息解算出周跳的大小,该方法可以在数据预处理(周跳检测)时对发生周跳卫星的观测值进行修复,因此在构建观测方程模糊度初始化时,当前的观测值信息都能被充分利用;但是修复的周跳大小受伪距测量精度影响,一旦发生修复错误会引入粗差,严重影响模糊度求解的可靠性。附加模糊度参数法,即将发生周跳的卫星重置模糊度参数求解,若未发生周跳的模糊度大于三个,则可利用已知的未发生周跳卫星模糊度修复发生周跳卫星的模糊度;该方法在数据预处理之后进行周跳修复,数据预处理时只进行周跳检测,并且利用了未发生周跳卫星求解高精度的基线矢量信息,因此附加模糊度参数方法非常可靠,在实验中也获得了较高的修复精度。
2.2.2 整周模糊度求解技术
整周模糊度的求解方法主要有测量域、坐标域(模糊度函数)与模糊度域的搜索方法,其中模糊度域搜索方法中的LAMBDA算法被公认为理论最严密、搜索效率最高的算法。LAMBDA算法可用于单历元整周模糊度求解,也可用于多历元整周模糊度求解。

图3 载波相位差分相对定位处理流程
单历元整周模糊度求解的思想是利用单历元的伪距和载波相位信息建立双差观测方程,最小二乘求得整周模糊度浮点解及其方差阵,采用LAMBDA算法获得整周模糊度整数解。多历元整周模糊度求解的思想是根据多个时刻的伪距和伪距载波相位信息进行序贯最小二乘滤波获得较为精确的模糊度浮点解和方差阵,然后再利用LAMBDA算法获得整周模糊度整数解。多历元整周模糊度求解成功率高于单历元求解,因此采用多历元整周模糊度求解方法。
2.3 相对定位处理流程
为实现动态校验对基准精度的严格要求,采用二级导航定位算法[8]进行载波相位差分相对定位的计算,第一级计算是对单个测距源的观测量进行滤波,以估计与宽巷频率相关的整周模糊度,第二级计算是完成单个观测量每个频率上的载波观测量的整周模糊度计算,在整周模糊度的确定以及随后的导航计算中,第二级算法可以通过载舰和飞机对可见卫星对的双差观测量移除系统偏差。
载波相位差分相对定位总体处理流程如图3所示,主要包含舰载无差分宽巷模糊度处理、机载无差分宽巷模糊度处理以及相对定位与完好性综合处理3个处理功能模块。
2.4 可行性实验
为验证算法的可行性与有效性,进行了两组实验,第一组单动态实验,第二组为双动态实验。
2.4.1 单动态实验
试验条件:固定两GNSS天线,两天线基线矢量为b0=[3.267,-0.338,0.008]T,基线长为3.285 m。另外设置一动态GNSS天线,作低速率圆周运动,数据采样率1 Hz,试验时长45 min,共2700历元。
首先对基线b1和b2分别进行解算,利用北斗B1、B2频点联合解算,然后将b1-b2的结果与b0作比较,若两者一致,则说明基线解算正确。图4为b1-b2的结果,与b0相一致,可以判断基线b1和b2解算正确。从图中还可以看出,该结果精度在0.1 m以内,因此可以认为相对定位的基线解精度优于0.1 m。
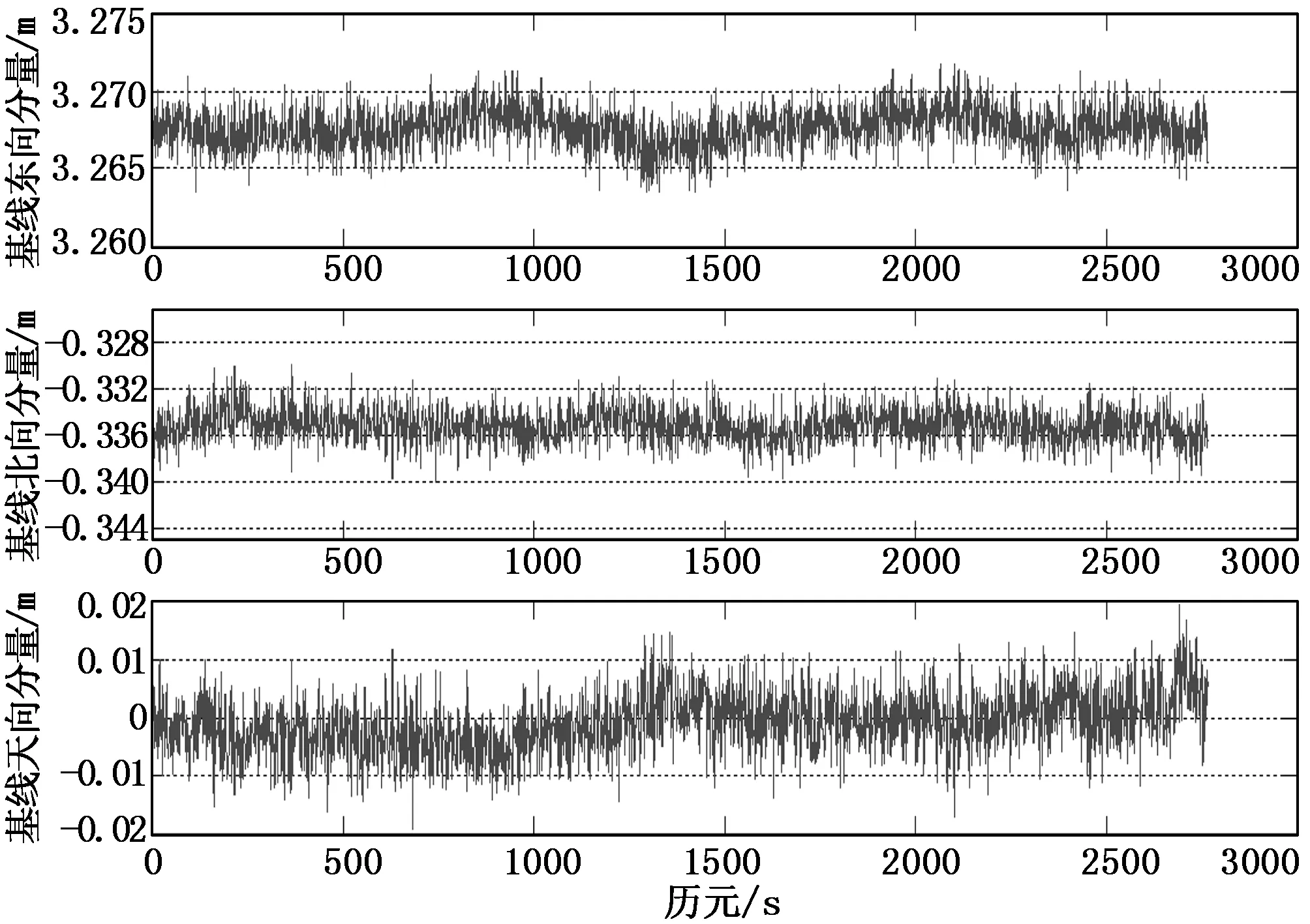
图4 基线b1和b2作差结果
2.4.2 双动态实验
试验条件:试验采用移动基准载体、移动载体,采用所研究的相对定位算法,进行双动态移动试验,两载体最大距离2.5 km,进行周期性相对运动,试验时间约1 h,数据采样率为5 Hz。
图5给出了移动载体与移动基准的相对距离,图6给出了实时相对定位的误差。由图可知,三维最大相对定位误差优于0.06 m,满足2.1分析所得的精度要求。
图5 移动载体与移动基准的实时相对距离示意图
图6 实时相对定位误差示意图
3 动态校验数据误差处理
由于舰船在航行或停泊时受到风浪、潮汐等洋流复杂的冲击和影响,使船体姿态和位置形状发生动态变化,舰载微波着舰引导设备的校验数据处理,除了与陆基同类系统类似的误差修正外,还需就船姿、船体变形等影响信息进行修正处理,获得比较精准的校验数据。
鉴于微波着舰设备动态校验系统面临的复杂环境和特殊的测量过程,系统着重考虑数据处理误差分为三大类:随机误差,主要包括各种不确定因素变化引起的误差和环境与设备状态扰动引起的误差;系统误差,主要包括微波着舰设备本身的调零误差、轴系误差以及跟踪过程中的时延误差等;船摇误差,主要包括船摇引起的隐周期误差[9]。对于测量误差分析和处理,若仅靠提高硬件设备的精度或靠增加设备数量来提高精度既有困难也不经济。目前,广泛采用的设计策略是通过先进的数据后期处理方法来弥补设备精度的不足,即充分利用该型设备动态校验的历史数据,综合统计学与现代信号处理技术,分离测量误差,以提高校验系统数据处理的精确度。根据上述设计思想,通过对微波着舰引导设备动态校验系统历史校飞残差的分析与处理,得到系统的一些先验特征,如残差特性、误差模型等,并将校飞数据处理的结果应用到实测中,处理流程如图7所示。
图7 基于历史数据分析的动态校验误差处理流程
4 实验验证
4.1 飞行实验与结果
采用无人直升机作为飞行平台,挂载相应的校验任务载荷完成对微波着舰引导系统方位、仰角和精密测距(PDME)的校验实验[10]。受无人直升机飞行能力限制,对飞机校验的航线和航程进行了裁剪,飞行轨迹共选择2条航线,分别为:
1)距着舰点8 km,3°下滑角,中心线进场;
2)距着舰点11 km,下滑3°,方位+2°斜线进场。
同时,为验证动态校验系统的有效性,提前将舰载精密测距设备的系统固定延时进行了调整,使微波着舰引导系统的测距结果有+40m的偏差。
第一次飞行检验的数据分析结果如图8~10所示,第二次飞行检验的数据分析结果如图11~13所示。
图8 第一次飞行方位误差曲线图
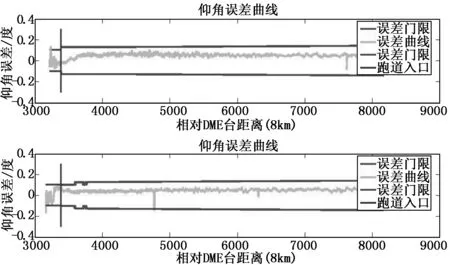
图9 第一次飞行仰角误差曲线图
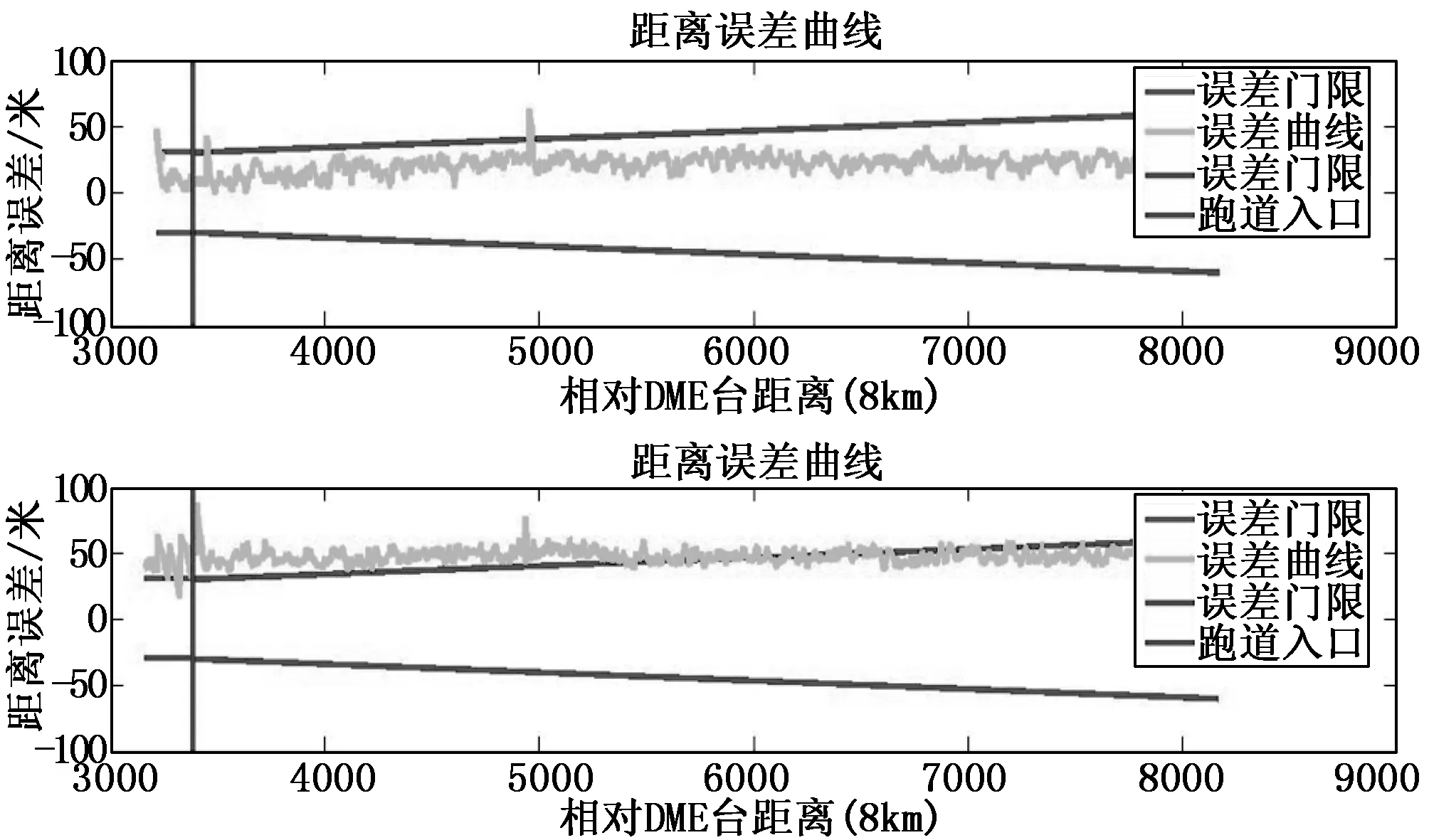
图10 第一次飞行距离误差曲线图
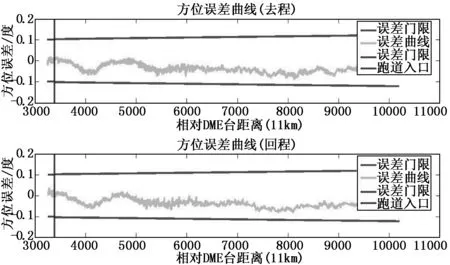
图11 第二次飞行方位误差曲线图
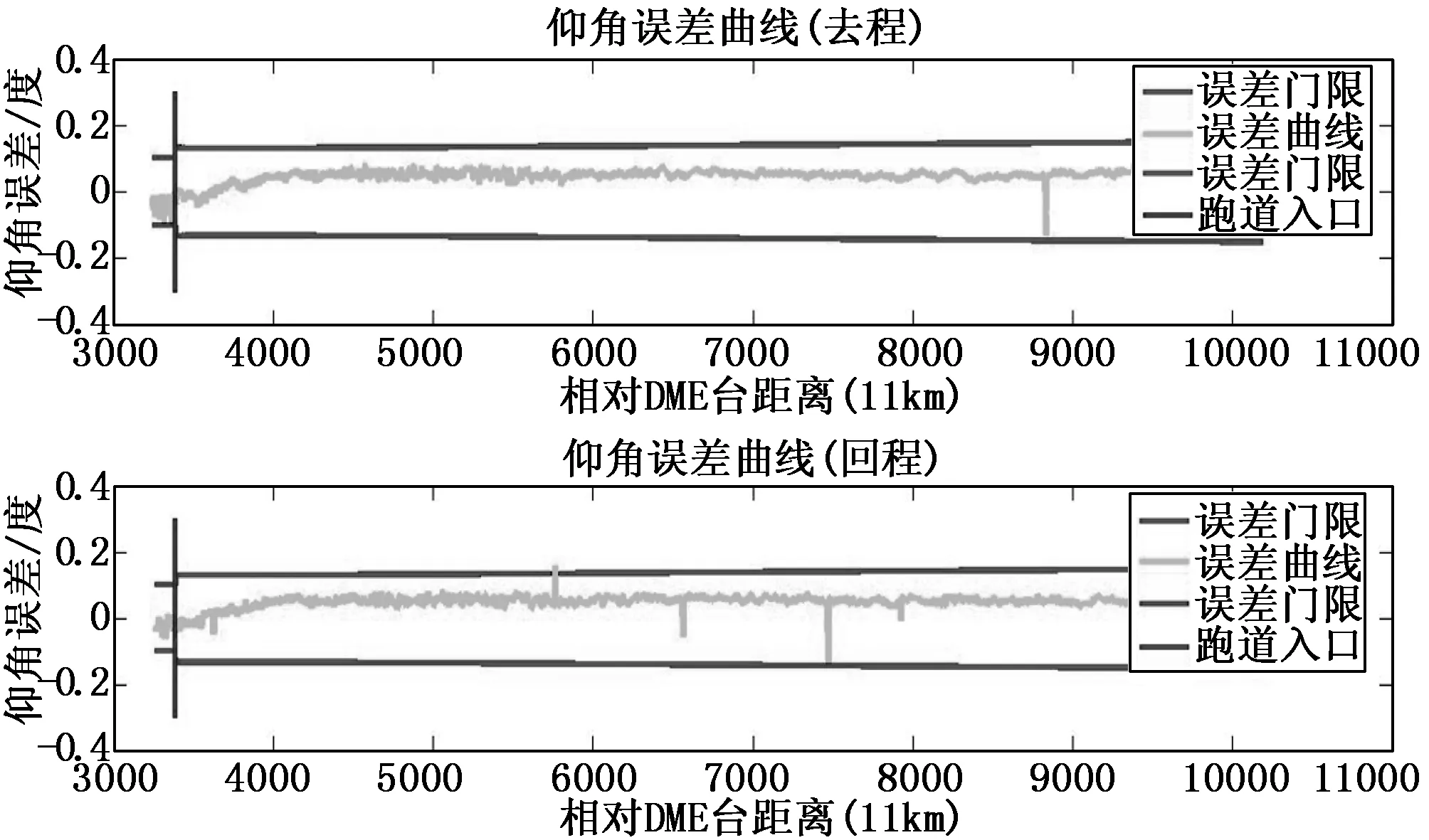
图12 第二次飞行仰角误差曲线图
图13 第二次飞行距离误差曲线图
4.2 结果分析与结论
从图8、11所示的方位误差曲线可以看出,两次方位误差曲线均在误差门限之内;中心线进场和斜线进场方位误差曲线略偏低,建议方位扫描中心角向左调整0.02°。从图9、12所示的仰角误差曲线可以看出,两次仰角误差曲线均在误差门限之内;中心线进场和斜线进场仰角误差曲线略偏高,建议仰角扫描中心角向上调整0.03°。从图10、13所示的距离误差曲线可以看出,两次距离误差曲线均超过误差门限;中心线进场和斜线进场距离误差曲线均偏高,存在约40 m固定偏差,这与实验前对精密测距设备的调整是一致的。实验表明,本文提出的微波着舰引导设备动态校验方案是可行的、有效的。
5 结束语
本文针对微波着舰引导设备的动态校验面临的现实问题,结合舰载机着舰引导信息精准需求,提出了动态校验系统的总体设计方案,构建校验系统软硬件结构和实现的技术途径方法,重点对校验基准的精度要求、获取方法以及校验数据的误差处理等关键技术进行了分析研究,通过仿真数据和飞行实验数据对比分析等手段,验证了微波着舰引导设备动态校验系统方案的可行性和有效性,研究结论对舰载航空导航设备动态校验技术发展具有理论指导意义,对提高舰载航空导航系统的可靠性和实效性具有一定的实践价值,成果可推广应用到陆基系列航空导航设备实现快速校验系统建设中。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
中学生学习报(2022年15期)2022-04-17
机电工程技术(2021年3期)2021-09-10
好日子(下旬)(2020年6期)2020-08-04
雷达学报(2018年5期)2018-12-05
劳动保护(2018年8期)2018-09-12
电机与控制学报(2018年9期)2018-05-14
电脑知识与技术·经验技巧(2017年9期)2018-02-24
移动通信(2017年11期)2017-06-20
山东工业技术(2016年10期)2016-09-06