电动汽车充电口的超声位姿测量系统设计
2020-12-08 03:36刘晓民杜岩平张晓勇王晓安
计算机测量与控制 2020年11期
刘晓民,杜岩平,张晓勇,王晓安
(1.北京华商三优新能源科技有限公司,北京 101106; 2.哈尔滨工业大学 机电工程学院,哈尔滨 150001)
0 引言
近年来,电动汽车行业发展迅速,对减少资源消耗,提高环境质量做出了巨大贡献[1]。截止到2017年底,中国电动汽车保有量已占全球电动乘用车保有量的40%[2]。然而目前的电动汽车充电系统需要人工拔插充电枪,针对未来大功率直流快充,该充电方式存在诸如劳动强度大、作业效率低、恶劣环境时不便于室外操作以及供电线路可能出现漏电而带来安全隐患等弊端[3],尤其随着自动驾驶技术和低速自动泊车技术日益成熟,迫切需要一种安全可靠的自动充电系统。
电动汽车自动充电分为充电口定位过程和充电枪的插拔过程,其中充电口定位工作过去主要以机器视觉为主,但视觉定位装置高成本,高延时,且图像对于天气环境的鲁棒性差[4],针对上述问题亟需开发一种成本低且抗干扰能力强的定位系统。
超声测距技术因具有结构简单、成本低廉以及测量精度高等优点而常被应用于定位系统中。Cricket定位系统[5-6]和Active Bat定位系统[7-8]为目前主流超声定位系统。前者基于TDOA算法,通过信标节点结合被测物体接收器实现三维定位,精度可达到厘米级。后者基于TOF算法,通过超声波发射装置和固定在天花板上的接收机来实现对发射装置三维坐标的定位。而D等人融合了Cricket系统和Active Bat系统,将一个超声发射器布置在天花板上,将四个超声接收器安装在地板上,通过多个发射节点与接收节点的组合计算,实现了地板上被测物体的位姿测量[9],但该系统位置计算方法复杂,且只适用于固定高度的环境中。
基于传统超声定位系统的缺点,设计了一种新型超声位姿测量系统,该系统能够实现对电动汽车充电口位姿的高精度测量,并具有较高的稳定性。
1 充电口位姿测量原理
常见的超声传感器布置形式有反射式和对射式。对射式测距原理根据发出超声波与收到超声波的时间差来计算距离[10]。设L是被测距离,t为发射与接收超声波之间的时间差,v为超声波在空气中的传播速度,则被测物体的距离为:
L=v×t
(1)

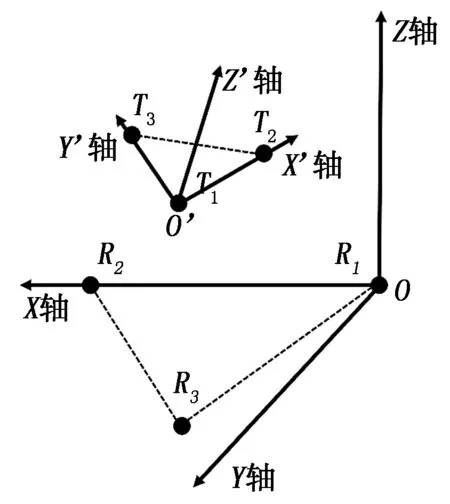
图1 超声传感器对应的空间坐标系
充电口三维坐标求解算法:由超声测距模块可以测出Ti(i=1,2,3)分别到R1、R2、R3的距离为di1、di2、di3,建立以下方程组来求的三维坐标:
(2)
求解方程组(2)可得到Ti的三维坐标,由此可得充电口中心的三维坐标为:
(3)
(4)

(5)
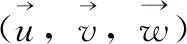
联立式(4)和式(5)可求出α、β、γ的值为:
(6)
至此,充电口的三维坐标和姿态角均已求出,即实现了位姿测量。
2 超声位姿测量系统设计
2.1 系统硬件设计
系统硬件由三部分组成:发射端、接收端和上位机,图2为硬件组成框图。
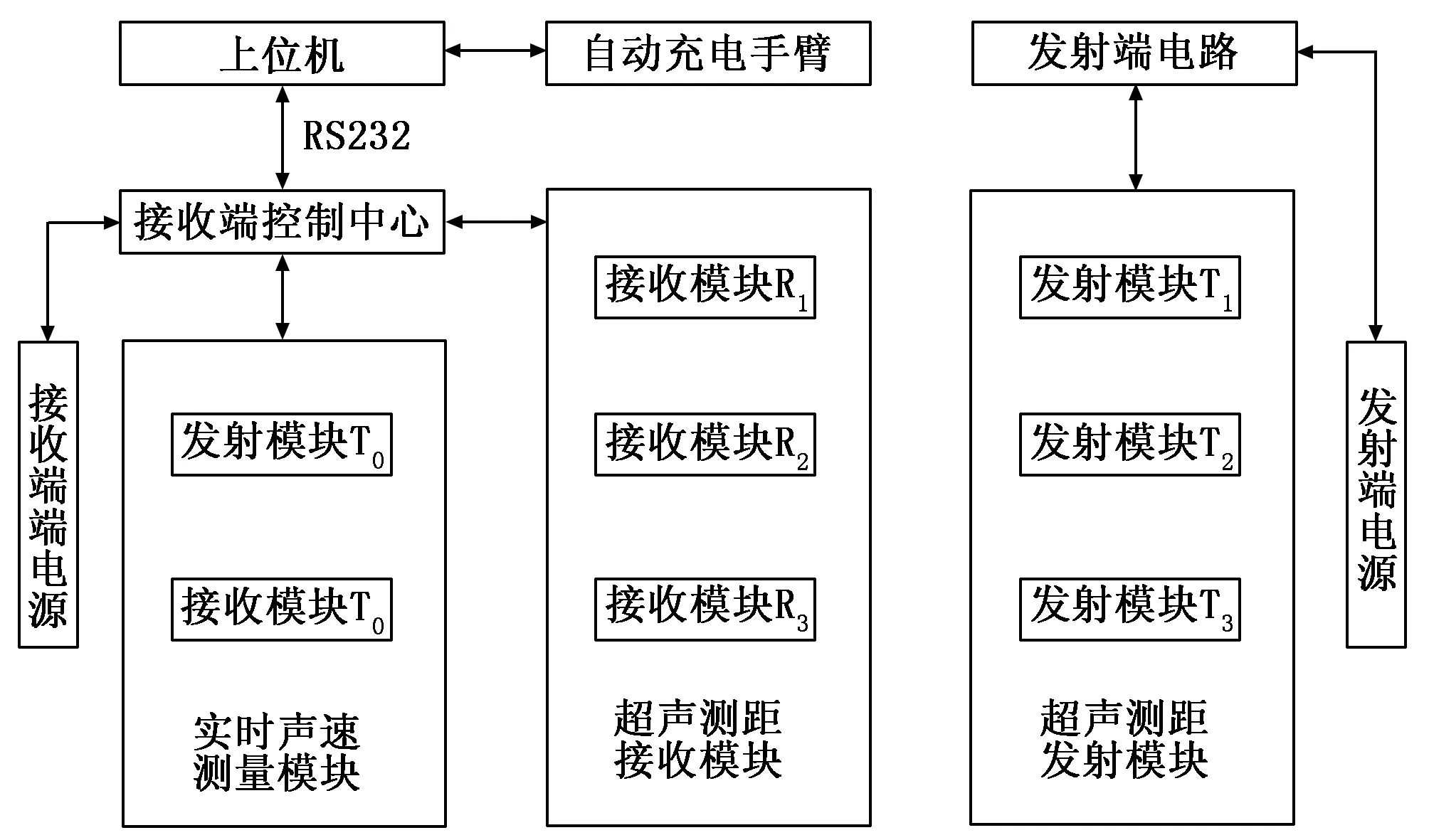
图2 超声位姿测量系统整体结构

2.1.1 超声测距发射模块
发射模块功能分别为:调制信号的产生、调制信号的放大、同时实现超声波信号的发射以及红外信号的发射,发射功能原理图如图3所示。调制信号产生时,需要单片机产生占空比为50%,频率为40 kHz的8个脉冲方波来启动超声波信号和红外信号的发射,要求单片机具有高精度时钟来满足高质量调制信号的产生,STC15F104W单片机内部集成了可靠的复位电路以及高精度R/C时钟,具有性价比高的特点,可以用于发射模块的设计;由于超声波的作用距离与调制脉冲峰值正相关,所以应放大调制信号以实现远距离测距;要求放大电路稳定可靠,并且具有较小的体积来满足测距模块的轻量化要求,MC34063集成电路具有可靠性高、体积小巧等优点,适用于调制信号的放大;基于超声波信号发射需求,发射器应具有发射的超声波范围广、作用距离适中、体积小成本低等特点,综合这些因素,选用NU40C16T/R型超声波发射器,其体积小质量轻、灵敏度高、声压高、耐久性好并且性价比高,可以满足设计要求;红外信号发射阶段,需要发射器具有灵敏度高、低功耗以及高精度等特点,而5 mm红外发射二极管发射时稳定均匀、发射距离远且功耗很低,因此选用该红外发射器。
2.1.2 超声测距接收模块
接收模块功能分为:超声信号接收、红外光信号接收以及信号处理功能,其原理如图4所示。超声信号接收:由于超声信号的传输距离与强度呈负相关,而超声信号转换为电信号后具有幅值较低的特点,为保证系统测量精度需要对接收到的超声信号所转换的电信号进行放大、滤波、整形等。CX20106A集成电路是一种超声波检测与接收的专用电路,集信号放大、限幅、带通滤波、峰值检波和波形整形电路于一体,并且该电路结构稳定、体积小巧且价格低廉,故选用该集成电路来接收超声波信号。红外信号接收阶段,红外接收器应在环境光条件下具有较强的鲁棒性,并且低功耗特点,HS0038B是一种一体化红外接收器,其光电检测和前置放大器集成在同一封装上、抗干扰能力强、抗电场干扰能力强且功耗很低,所以选用该款红外接收器进行红外信号的接收。信号处理阶段,要求单片机处理速度快,时钟精度高,所以选用和发射模块相同的STC15F104W单片机。
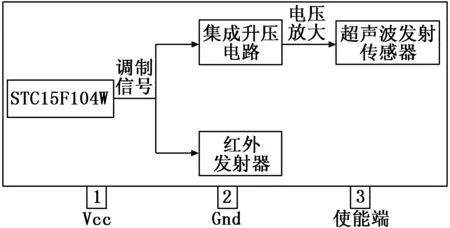
图3 超声测距发射模块电路原理框图
2.2 系统软件设计
系统软件设计的主要内容是超声测距模块的控制程序设计和位姿测量主程序的设计,并通过相应的串口通信实现下位机和上位机之间的数据传输,然后通过上位机显示软件将最终的位姿测量结果显示出来。
发射模块的功能为频率为40 kHz的连续脉冲信号,单次发射数量为8个,脉冲信号间时间间隔为20 ms,占空比为50%。程序流程为对发射器及系统初始化时,设定方波计数标志i=0.20 ms后进入定时器0的中断,首先重装定时器0的初值以保证方波频率为40 kHz,然后对电平进行取反操作;定时器0每中断一次方波计数标志加1,当方波计数标志大于16,方波传输完成。循环上述流程,以实现超声持续发射。上述流程如图5所示。
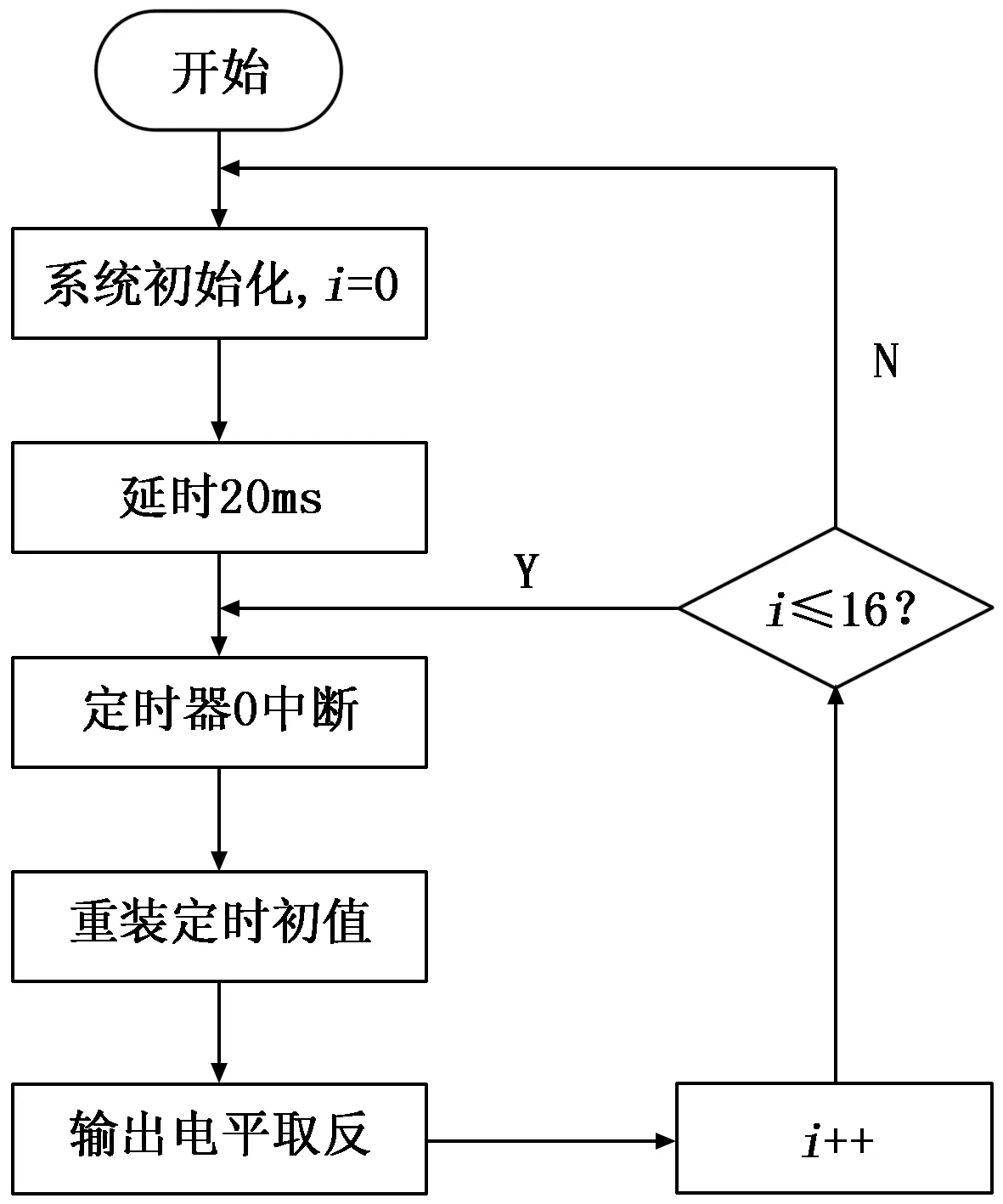
图5 发射模块程序流程
接收模块的功能为将超声波传播时间映射为芯片输出的高电平持续时间。具体流程为对接收器及系统进行初始化,系统进入红外光信号接收准备状态。由于光速与声速的量级差,系统假定接收到红外光信号时,判定为超声信号发射,此时芯片引脚的输出电平由低电平状态转换为高电平状态,进入超声信号接收准备状态。接收到超声信号后,芯片引脚输出由高电平状态转换为低电平状态,至此单次测量结束。上述过程将在系统启动后进行循环检测。上述流程如图6所示。
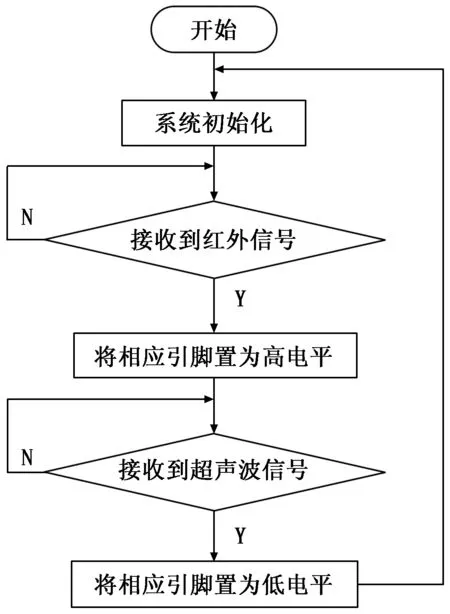
图6 接收模块程序流程
3 超声位姿测量系统优化与实验
基于电动汽车自动充电的需求,系统预期性能指标为:三维坐标误差±2 mm;姿态角测量误差±3°。为探究本系统是否能达到预期指标,首先对传感器分布进行优化,然后进行测距模块性能实验以确定测距精度,最终进行了位姿测量实验。实验环境为温度25 ℃,湿度65%RH;平面距离测量工具为直尺和网格纸,最小刻度均为1 mm;高度测量工具为高度游标卡尺,测量精度为0.02 mm;角度测量工具为数显角度尺,测量精度为3′。
3.1 传感器布置形式优化
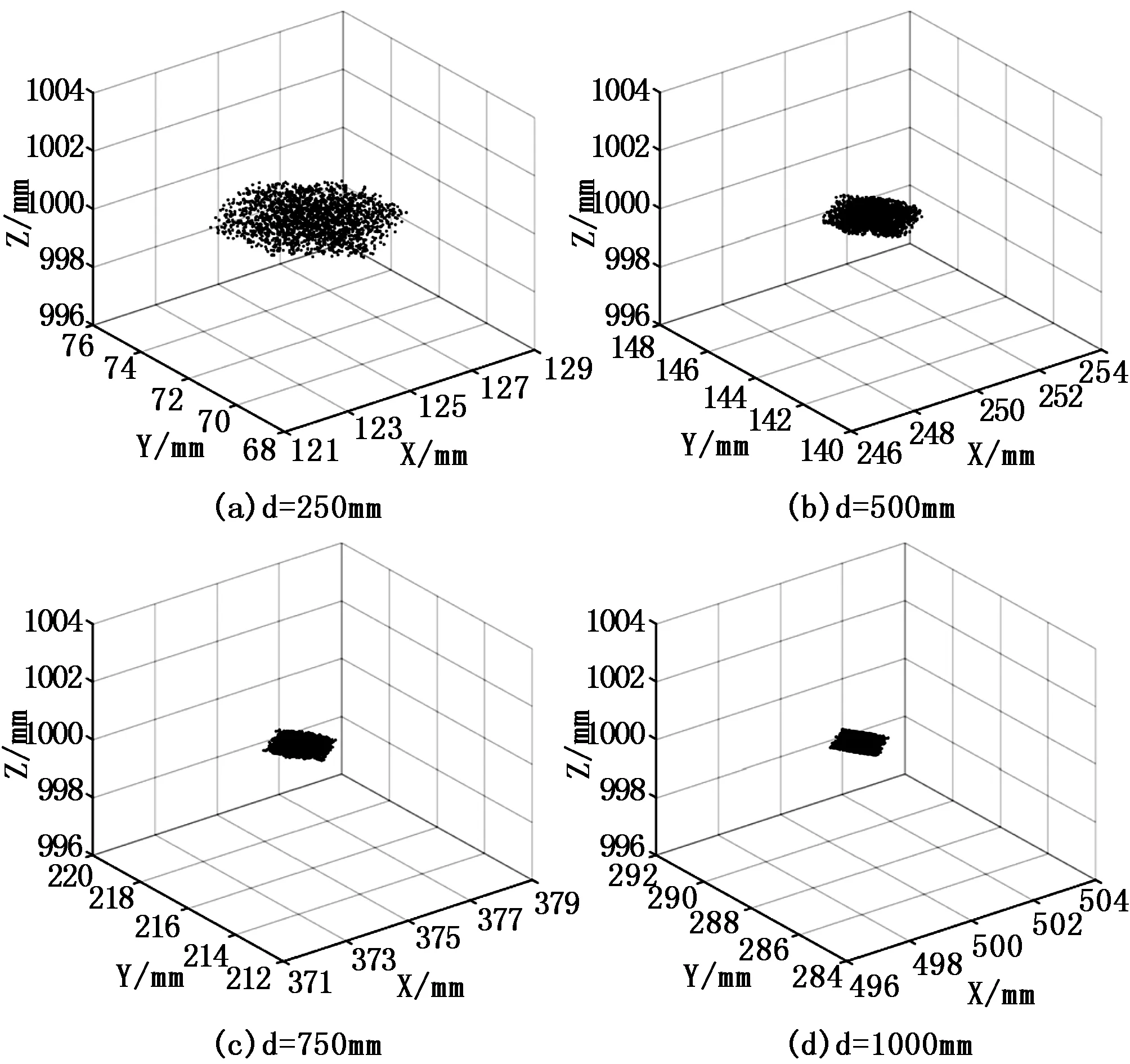
图7 不同接收模块布置间距时的测量坐标逆解数据
图8是不同布置间距d下的最大三维坐标误差,可以看出当间距为250 mm时,最终造成的三维坐标误差最大为2.361 0 mm,随着间距的增大,误差明显减小,当间距达到750 mm时,最大误差为0.844 4 mm,在可以接受范围内,并且此后再增大间距对误差的减小效果不再明显。此外,考虑到超声换能器的波束角,太大的布置间距会影响超声波的传输,综合考虑并经过实验验证,选取布置间距d=700 mm。
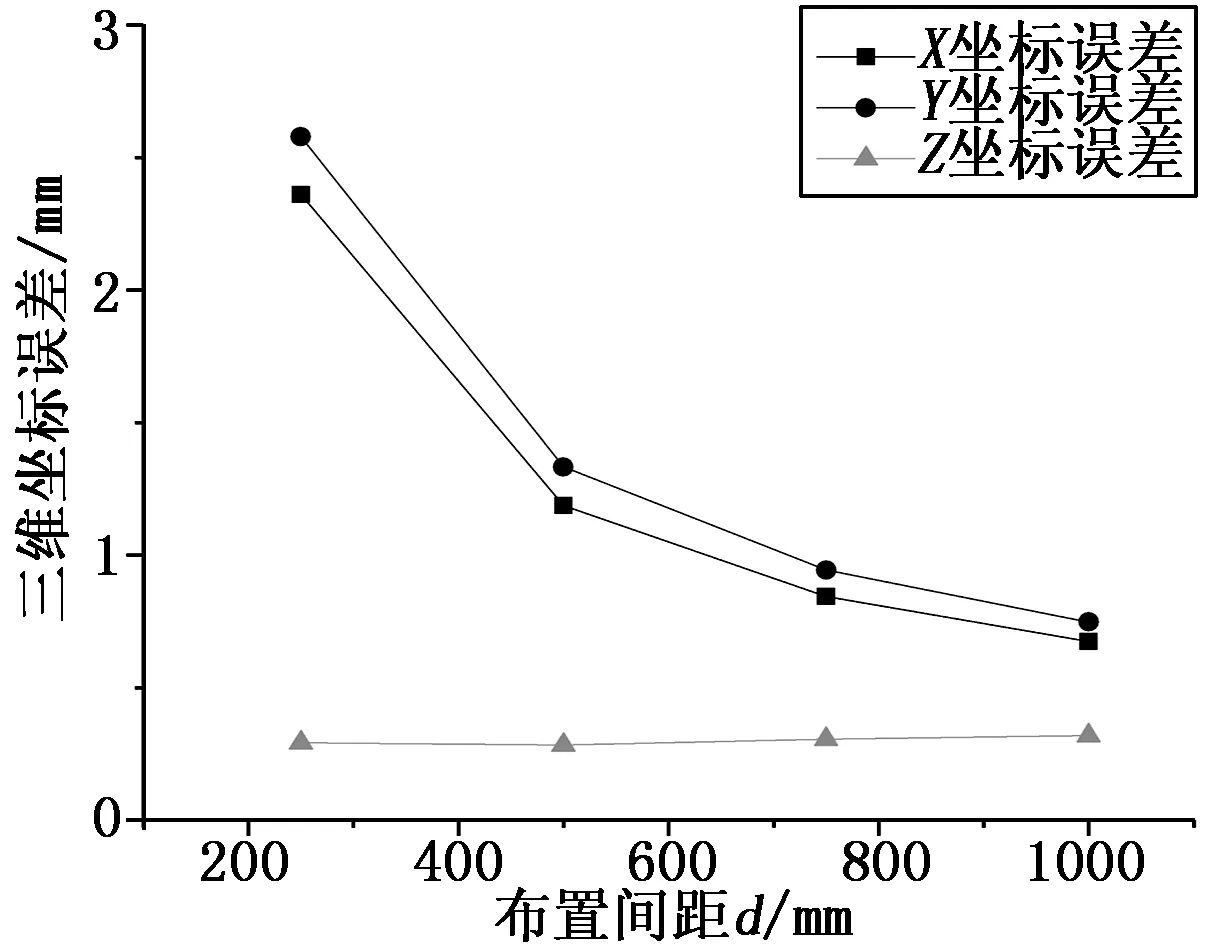
图8 不同布置间距下的最大三位坐标误差
3.2 位姿测量实验
按照上述位姿测量原理和接收模块布置间距,搭建位姿测量实验平台如图9所示。
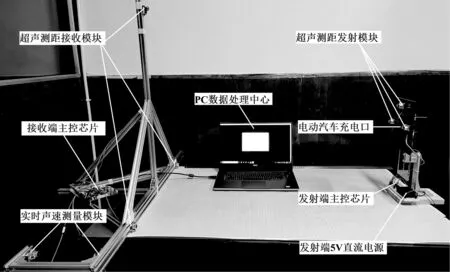
图9 位姿测量实验平台
位姿测量实验分为充电口中心三维坐标测量实验和充电口平面角度测量实验。考虑到电动汽车的自动泊车精度,确定充电口三维坐标变化范围为:沿接收端坐标系Z轴500~1 200 mm,沿X轴150~550 mm,沿Y轴400~600 mm。确定充电口的角度变化范围为:α、β、γ∈[-15°,+15°]。
三维坐标测量实验流程如图10所示,首先将充电口调节至与接收端坐标系的XY平面平行,然后以10 mm为单位确定坐标范围,并在其范围内随机组合100个测量点,对这100个点进行三维坐标测量,最终按上述流程进行实验,得到每个测量点下的坐标偏差如图11所示,可以看出,X、Y、Z三坐标的位置偏差均维持在±1.5 mm范围之内,可以满足应用要求。

图10 充电口中心三维坐标测量实验流程图
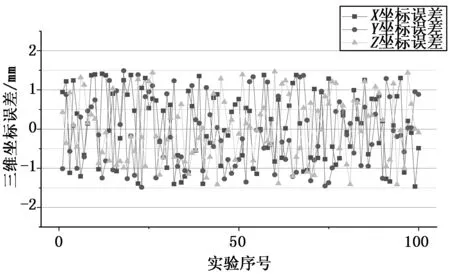
图11 充电口中心三维坐标测量实验误差示意图
充电口平面角度测量的实验流程如图12所示,首先将充电口中心固定于(700 mm,350 mm,500 mm)处,然后以1°为单位,在确定的角度范围内随机组合出100个测量点,对这100个测量点进行充电口平面角度测量,进而按上述流程进行实验,可以得到每个测量点实测角度,最终可计算出角度偏差如图13所示,可以看出,三个角的角度误差能够稳定在±2.4°范围内,可满足应用要求。

图12 充电口平面角度测量实验流程图
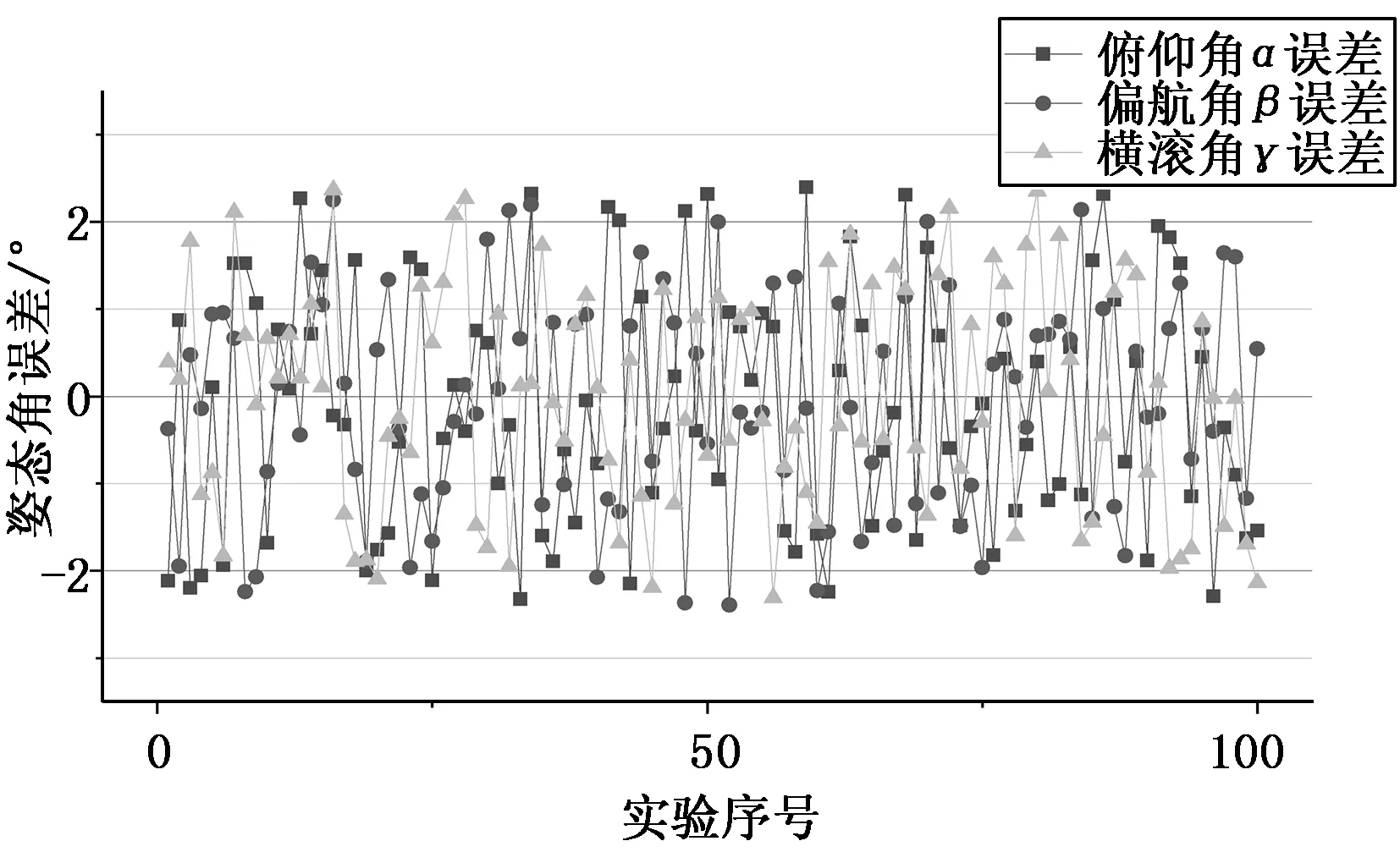
图13 充电口平面角度测量实验误差示意图
4 结束语
本文提出了一种采用多点位融合的超声重构测量技术实现对空间物体高精度位姿测量的方法,该方法采用特定的“三发三收”传感器布置形式,使用自主研制的高精度超声测距收发模块,利用STM32等控制芯片,实现了对电动汽车充电口的位姿测量。实验结果表明:该系统对X、Y和Z方向的测量精度为±1.5mm,Rx、Ry和Rz方向的测量精度为±2.4°,并可以实现实时声速测量,同时解决了不同环境下声速发生变化对定位带来的测量误差的问题,提高了自动充电系统充电口定位的稳定性和测量系统的鲁棒性,能够满足电动汽车充电口位姿测量的工程需求。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
读者(2022年13期)2022-06-20
北京航空航天大学学报(2021年9期)2021-11-02
现代信息科技(2020年22期)2020-06-24
电子制作(2019年19期)2019-11-23
山东工业技术(2019年16期)2019-07-19
电子技术与软件工程(2019年6期)2019-04-26
电子制作(2019年24期)2019-02-23
电子制作(2019年23期)2019-02-23
科技与创新(2018年12期)2018-06-22