
基于图像去噪的最大均匀平滑法的改进
2020-12-04 08:01石炜,仝朝
计算机技术与发展 2020年11期
石 炜,仝 朝
(内蒙古科技大学 机械工程学院,内蒙古 包头 014010)
0 引 言
图像去噪技术是图像处理中的一种基础技术。由于各种各样的噪声干扰,在获取一幅原图像时,都会使图像的显示模糊,淹没了图像的特征,使得图像的质量下降,从而使图像的后期处理分析难度加大[1]。为了改善图像的质量,需要抑制图像的噪声。将提出的处理方法称为平滑或去噪,目的是在最大限度地去除图像噪声点的同时,保护人们所感兴趣的区域(主要是指边缘或纹理)。目前,许多卓有成效的图像去噪方法都是人们从不同的角度提出的,但从总体上根据其工作域的不同可分为两大类,即空间域与频率域。空间域有最大均匀平滑滤波、高斯滤波、超限像素平滑滤波与形态学滤波等,频率域有巴特沃斯滤波、高斯低通滤波与小波阈值收缩滤波等。其中最大均匀平滑法的主要原理是利用每个像素周边的像素均值进行替换,通过对像素的多次迭代来增强待处理图像的显示效果。用这种方式在保持图像边缘清晰度的同时清除图像噪声,但这种方法会对图像过分地平滑,因此在处理有复杂形状边界的图像时,会使得图像的许多细节消失,大大降低了图像的使用价值[2]。因此,则对这一现象,该文提出了一种基于空间邻域平滑法的改进方法,进而提出了一种用于图像去噪的有选择的图像平滑算法。
1 空间邻域平滑算法
邻域平均法[3]是一种局部空间域处理算法。设一幅图像f(x,y)为N×N的阵列,平滑后的图像为g(x,y),它的每个像素的灰度级由包含(x,y)邻域的几个像素的灰度级的平均值所决定,即用下式得到平滑的图像。
其中,x,y=0,1,…,N-1,S是以(x,y)点为中心的邻域集合,M是S内坐标点的总数,图1表示4邻域点和8邻域点。

对于多帧有噪声的同一幅图像fi(x,y)(例如雪花干扰的静止电视图像且这些干扰都互相独立)进行帧间平均:
其中,N为帧数。
图像邻域平均法算法简单,计算速度快,但它的主要缺点是在降低噪声的同时使图像产生模糊,特别在边沿和细节处,邻域越大,模糊越厉害。为了减少这种效应,可以采用阈值法,也就是根据下列准则形成平滑图像。
g(x,y)=
其中,T是一个规定的非负阈值。当一些点和它们邻域灰度的均值的差值不超过规定的阈值T时,仍保留这些点的像素灰度值。这样平滑后的图像比直接采用邻域平均法的模糊度减少。当某些点的灰度值与它们的邻域灰度的均值差别较大时,它很可能是噪声,则取其邻域平均值作为该点的灰度值。但这种处理效果并不是很理想。
为了克服简单局部平均的弊病,目前已提出许多保留边沿细节的局部平滑算法,讨论的重点都在如何选择邻域的大小、形状和方向,如何选择参加平均的点数以及邻域各点的权重系数等方面。该文就是在此基础上提出了一种新的平滑方法。
2 有选择的图像平滑算法
中值滤波法与邻域平均法对图像中的噪声点有较好的去除效果,但对图像的边缘与细节的处理有较大的损害,因此该文提出了有选择的图像平滑,它是对最大均匀性平滑的一种改进[4]。
对每个图像的任意像素,它只有三种可能的情况:图像本身、图像背景和噪声点。通常使用的空间域平滑算法并未区分这几种情况,故使得图像在去噪的同时模糊了边界。因此,此算法对图像使用如图2的掩膜(其中有1个3×3正方形、4个五边形和4个六边形共9个邻域),利用相似者相容的原理,首先判断像素点属于三种情况中的哪一种,之后再根据判断结果,采用相应的方法来进行图像处理。

图2 用于判断像素录属模板
图2中所示各模板内部圆圈表示待处理像素,周边的黑点表示待处理像素的邻域像素。
(1)若各模板内的邻域像素点的均值与待处理像素点的差值的绝对值很大,则判定待处理像素点为孤立噪点[5]。
(2)若待处理像素点不是孤立噪点,则模板内的邻域像素点的均值与待处理像素点的差值的绝对值取为最小的模板。
根据这两项规则,利用matlab软件判断待处理像素点的隶属状况。若待处理像素点为孤立噪点,直接使用其邻域内除去本身像素点外的所有像素点灰度值的均值代替,以此便可消除该噪点对图像的影响;对于非噪声点,则使用与其所对应的模板对该像素点进行平滑滤波。
因此,引入加权模板(加权模板0至8)进行滤波,即利用各像素灰度值相应的加权模板求出其加权平均值,用这个值来代替待处理像素的灰度值。

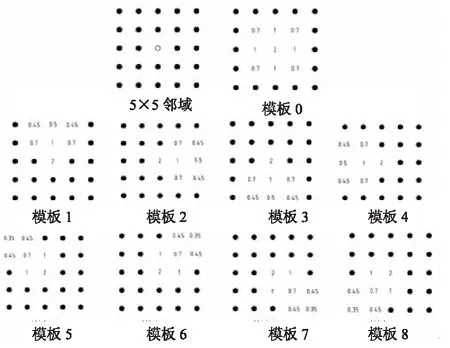
图3 用于滤波的加权模板
设i和j为平面坐标系的横纵坐标,原点在图像显示区左上角。令f(i,j)为坐标点(i,j)的像素灰度值,设定一个灰度阈值d用于判断像素点是否为噪声点。
(1)分别计算各模板中的邻域像素点平均值与待处理像素点(i,j)的灰度值差的绝对值dx,其中x表示滤波模板的序号,其公式如下:
d0=|[f(i-1,j-1)+f(i-1,j)+f(i-1,j+1)+
f(i,j+1)+f(i+1,j+1)+f(i+1,j)+
f(i+1,j-1)+f(i,j-1)]/8-f(i,j)|
d1=|[f(i-2,j-1)+f(i-2,j)+f(i-2,j+1)+
f(i-1,j+1)+f(i-1,j)+f(i-1,j-
1)]/8-f(i,j)|
…
d8=|[f(i,j-1)+f(i+1,j-1)+f(i+1,j)+f(i+1,j-2)+f(i+2,j-2)+f(i+2,j-1)]/8-f(i,j)|
计算并得出dx的最小值及相应的模板序号,即取dmin=min{d0,d1,…,d8},则dmin=dx,其中x表示相应模板的序号。
(2)判断其是否满足dmin>d,若满足此条件,即各模板的邻域像素均值的差与待处理像素灰度值的绝对值都是较大的,因此判断此处待处理像素点为孤立噪点[7]。对于此处噪点,直接使用模板0,对除待处理像素点外的所有点加和平均,替换待处理像素点,以此消除孤立噪点对图像的影响。即:
f(i,j)=[f(i-1,j-1)+f(i-1,j)+f(i-1,j+1)+f(i,j+1)+f(i+1,j+1)+f(i+1,j)+f(i+1,j-1)+f(i,j-1)]/8
若dmin≤d,则判定待处理像素点为原图像上的点,则记下dx中最小值的相应模板标号,选用该标号的模板利用其相对应的加权模板进行平滑滤波,即用模板的加权均值代替该待处理像素点的灰度值。
各模板加权均值[8]的计算公式为:
u0=[0.7×f(i-1,j-1)+f(i-1,j)+0.7×
f(i-1,j+1)+f(i,j+1)+0.7×f(i+1,j+
1)+f(i+1,j)+0.7×f(i+1,j-1)+
f(i,j-1)]/6.8
u1=[0.45×f(i-2,j-1)+0.5×f(i-2,j)+
0.45×f(i-2,j+1)+0.7×f(i-1,j+
1)+f(i-1,j)+0.7×f(i-1,j-1)]/3.8
…
u8=[f(i,j-1)+0.7×f(i+1,j-1)+f(i+
1,j)+0.45×f(i+1,j-2)+0.35×f(i+2,
j-2)+0.45×f(i+2,j-1)]/3.95
若dmin=dx且dmin≤d,计算ux(其中x表示相应模板的序号),使f(i,j)=ux。
遍历除图像边界两行外的所有点,利用上述处理方法对图像像素点进行处理。
3 实验结果与分析
利用以上基本原理,使用matlab编程,对图像进行去噪平滑[9]。同时使用不同方法对图像进行滤波处理,如图4所示,对三种不同图像分别采用均值滤波、中值滤波与有选择的图像滤波,比较其效果[10]。
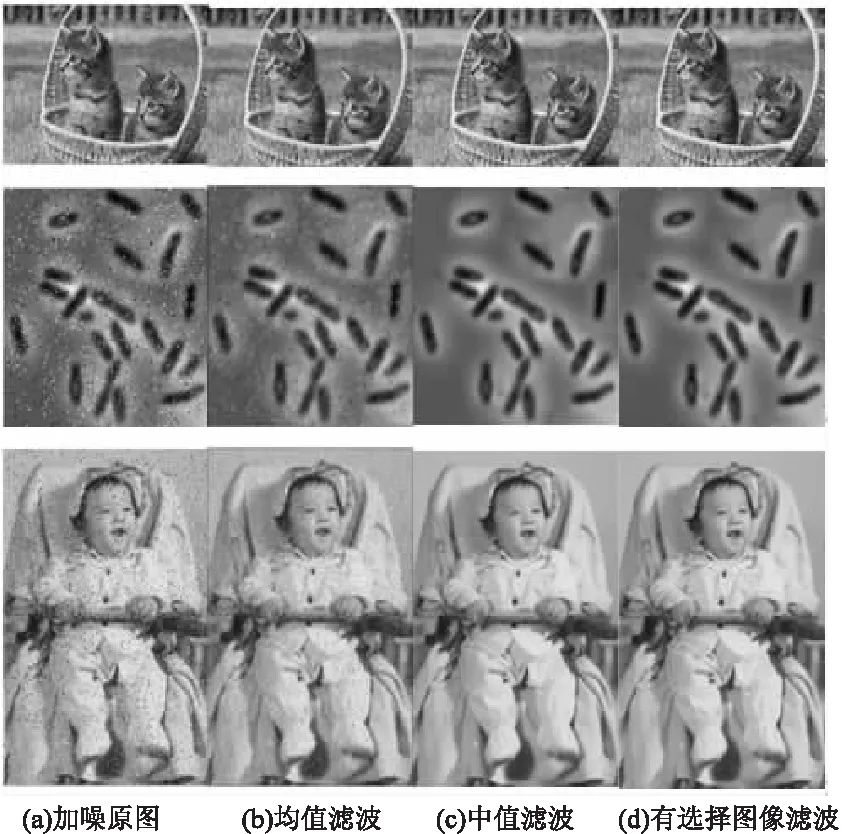
图4 各种滤波方法效果图
实验表明,有选择的图像滤波算法在去除噪声的同时,能够很好地保持图像的细节与边缘,因此这是一种比较有效的图像平滑算法。
为了客观量化以上结果的差异,引入模糊线性指标、熵值、标准差来进行评估[11]。模糊线性指数γ是反映图像有效信息量对比度大小的指标,其值越小,表明图像的有用信息越多,质量越好,从而说明所消除噪点的效果越好,其函数表达式为:
其中,fij表示像素(i,j)的灰度值,fmax表示图像f的最大灰度值,M×N表示图像的尺寸。
反映图像对比度的主要指标是标准差[12],图像的反差越大则图像的标准差越大,即图像的对比度越大,从而说明图像平滑后所能够保证的信息量越完整,其函数表达式为:
由上式可知,对图4中的上、中、下三幅图像的不同处理方法进行计算[13],其结果如表1所示。
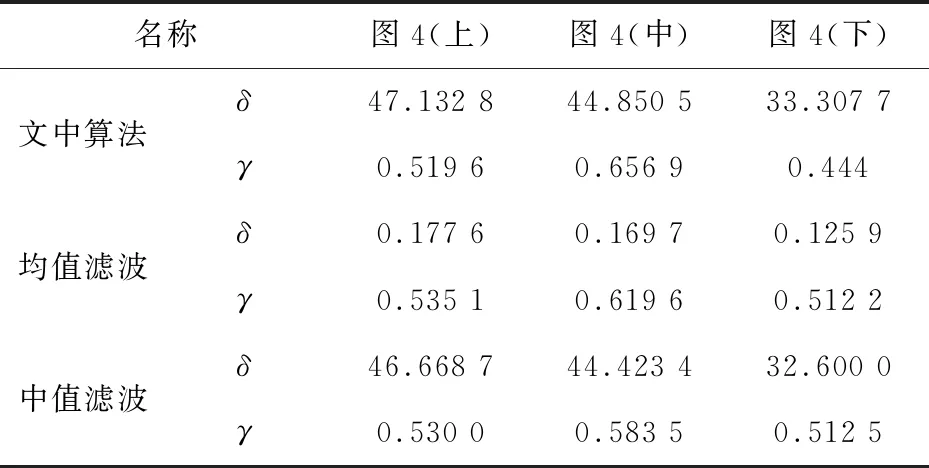
表1 不同算法的定量指标比较
由表1可知,文中算法在图4中的上与下两幅图的模糊线性指数γ都低于其他两种算法[14],而在图4的中图,其模糊线性指数γ高于其他两种算法,而所有图像的标准差δ均大于其他算法。对于图4,文中算法的模糊线性指数γ,虽然略高于其他两种算法,但标准差δ却大于其他两种算法,说明文中算法对于细节较少的图像其优势不是很大,但还是能够有效地保留较多的图像信息。而且在噪声的干扰下,文中算法拥有更强的优势,而均值滤波法处理图像后会丢失大量的信息,同时文中算法的γ、δ值保持较为稳定。
4 结束语
通过改进均值滤波的筛选规律与对噪点、边缘和背景的不同处理方法,来对图像进行滤波处理,由此提出了一种有选择的图像滤波方法。该算法可根据图像的内容进行不同的有选择的加权滤波[15]。实验结果表明,对具有不同内容信息的图像,该算法均能达到较为理想的去噪效果,尤其是对于拥有大量细节信息的图像,该算法能够在很好地去噪的同时保证大量的细节信息不丢失。
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
农业工程学报(2022年7期)2022-07-09
北京航空航天大学学报(2022年6期)2022-07-02
逻辑学研究(2021年3期)2021-09-29
集装箱化(2021年1期)2021-04-12
现代电子技术(2021年1期)2021-01-17
中国信息技术教育(2020年2期)2020-02-02
现代电子技术(2018年18期)2018-09-12
电脑知识与技术(2018年35期)2018-02-27
科学家(2017年12期)2017-08-10
