旋盖机适用多螺距瓶盖的传动设计
2020-12-01 10:02郑长发黄文金
酒·饮料技术装备 2020年6期
郑长发 汪 军 黄文金
引言
酒、饮料等包装企业,以往传统的方式是在一条生产线上采用固定的包装材料,批量规模化生产,以期达到生产线效率最大化。随着消费市场需求趋于饱和,以及消费者的消费观念升级,在酒、饮料的包装形式也出现了多样化设计。例如一条PET 瓶包装生产线上,往往需要兼容生产多种不同的饮料品种。例如,可能有碳酸饮料、果汁饮料、水等。基于物料特性不同,往往包装样式也随之变化,其中旋盖机需要满足不同的塑料盖进行封盖[2],这些盖的螺纹牙距[3]不尽相同,以往要通过更换旋盖机的相关零部件才能实现,费工费力,成本高。多螺距适用传动设计能够很好平衡成本和效率问题,既能满足柔性生产需求,又无需对设备硬件进行更换改造。
1 结构设计
中辰轻机经过多年的技术积累和沉淀,在国内率先开发出一款能够适应多种瓶盖的旋盖机,最早用于娃哈哈公司的水汽生产线,尤其在PET 瓶高速吹灌旋一体化无菌灌装项目[4]得到深入的应用和推广。其原理是在传统旋盖机上,增加差速电机[5]带动的行星齿轮传动机构[6],从而在不更换旋盖机机械零件的前提下,实现一台旋盖机既适合水瓶旋盖[7],也适合含气瓶旋盖,在其它场合也有水与果汁瓶盖通用的机型或者含气和果汁瓶盖的组合机型。
图1 为一台带差速电机的旋盖机,新设计主要在传统旋盖机上增加差速电机(1)的行星传动组件,其作用是使旋盖头(3)的转速可通过差速电机(1)的转速进行调频控制。
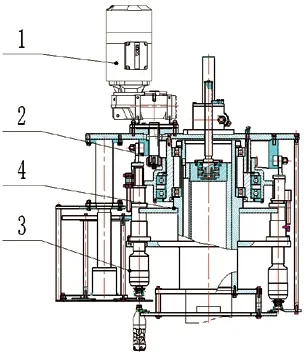
图1 差速传动的旋盖机
2 理论模型
旋盖的要求是,旋盖头既有自转也有公转,旋转自转一周,沿凸轮(2)下降的距离(旋盖头公转)要大于瓶盖的螺距,并且保持在一个合适的范围。如何实现在同一公转速度(旋盖机转速)下,通过改变旋盖头自转的速度(加快或者减慢),来使旋盖头符合不同螺距的瓶盖,这是本设计所解决的问题。现将其中的行星齿轮机构简化出来进行分析,简化模型如图5 所示。
根据电机的正转(图2)和反转(图3)或者制动(图4)三种状态,来分析旋盖头自转的速度变化情况。
3 理论计算
根据理论力学公式[8]:绝对运动转速=牵连运动转速+相对运动转速,有如下三种状态计算。
以下所用到的符号说明:
n1------中心齿轮绝对转速
Z1------中心齿轮齿数
nr1-----中心齿轮相对转速
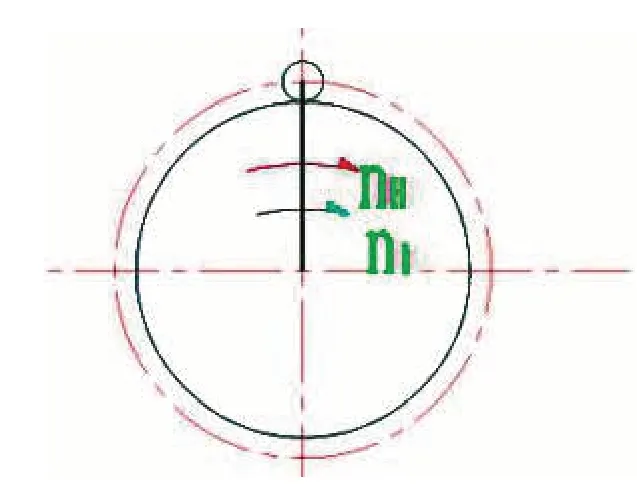
图2 电机正转
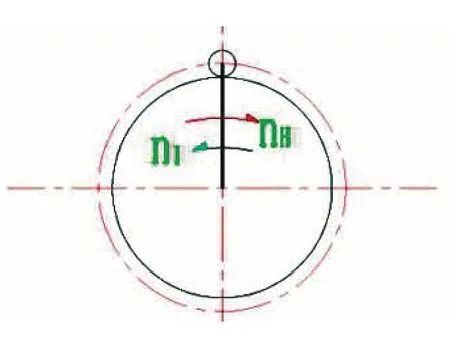
图3 电机反转
图4 电机制动
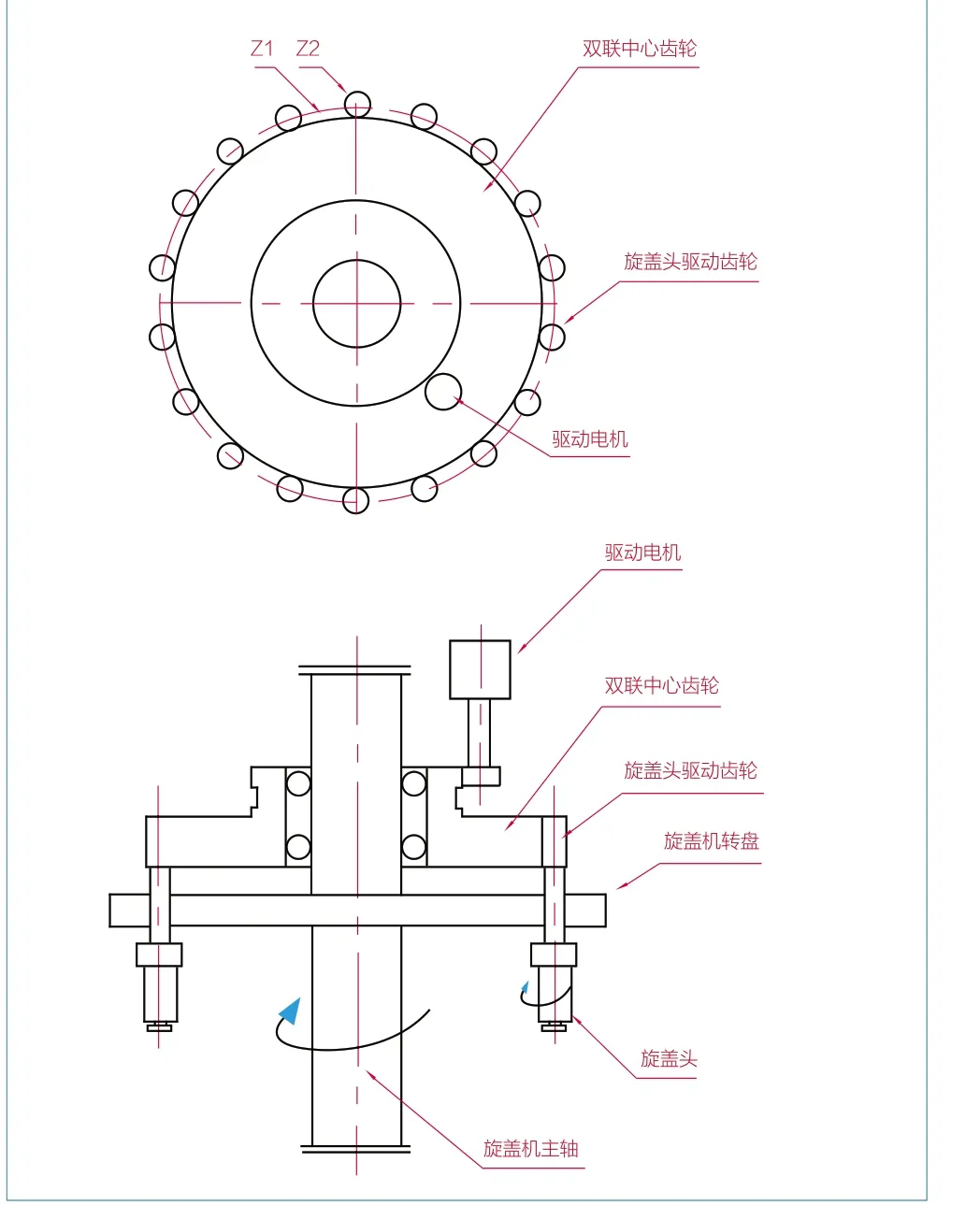
图5 差速电机行星传动机构示意图
nH-----牵连运动转速(旋盖机公转速度)
n2------旋盖头绝对转速
nr2------旋盖头相对转速(旋盖起作用的转速)
Z2------旋盖头驱动齿轮齿数
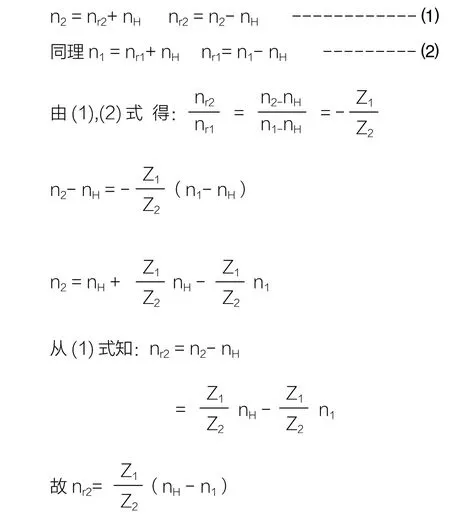
3.1 如图2 所示,电机正转:
4 结论
项目组在塑料盖旋盖机的传动设计中引入差速电机,采用行星齿轮传动结构,经过理论 计算,找到适用不同塑料盖瓶盖的下降螺距值,旋盖头需要的转速,从而可以通过PLC 程序[9]控制。经过上述研究得出如下结论:
当电机正转时,旋盖头的自转速度减慢,意即在同样的凸轮下,旋盖机适合于较大的盖螺距;
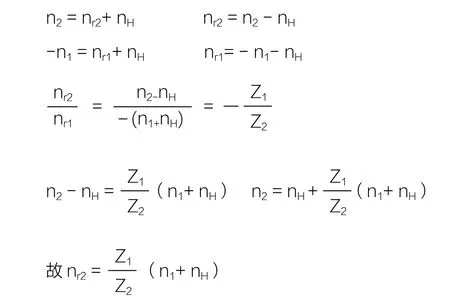
当电机反转时,旋盖头的自转速度加快,意即在同样的凸轮下,旋盖机适合于较小的盖螺距;
当电机制动时,旋盖头的自转速度就是传统旋盖机的转速。
本文通过对行星齿轮传动机构在旋盖机上应用的分析,希望对相关人员在设计、使用类似的产品有所裨益。
3.2 如图3 所示,电机反转:
3.3 如图4所示,电机制动,也即n1=0,从上面的分析,不难得出:
猜你喜欢
幼儿100(2022年23期)2022-12-27
学苑创造·A版(2022年5期)2022-05-19
内江科技(2022年3期)2022-03-30
中华民居(2020年6期)2020-06-09
阅读(科学探秘)(2019年10期)2019-12-09
中学生数理化·七年级数学人教版(2019年12期)2019-05-21
中国卫生标准管理(2015年4期)2016-01-14
爆笑show(2015年11期)2015-12-17
中学科技(2014年11期)2014-12-25
鸭绿江(2013年12期)2013-03-11