
基于三维激光扫描技术对灾后滑坡的应急监测
2020-11-30 06:54李鸿均邱延林
科学技术创新 2020年34期
李鸿均 邱延林
(中国安能建设集团第三工程局有限公司,四川 成都611136)
1 概述
近年来,我国中西部地区接连出现特大滑坡事件,2019 年7 月23 日贵州六盘水水城县发生特大山体滑坡,山体滑坡的危害受到很多因素的影响,对社会经济和人身财产安全造成重大威胁[1]。在应急抢险救灾过程中快速获取该滑坡体地形数据,分析滑坡运动的变化特征,准确分析判断滑坡的稳定性,以保障救灾人员的安全尤为重要。基于此,本文利用三维激光扫描技术对灾后滑坡进行变形监测,为分析该灾后滑坡变形趋势以及制定救援方案提供依据。
2 地面三维激光扫描技术
三维激光扫描技术[2]是一种非接触式主动快速获取物体表面三维密集点云技术,成为一种高时空分辨率三维对地观测手段,通过主动获取物体表面三维坐标(X、Y、Z)和一定属性(反射强度等)的不规则空间分布的三维点云[3]。三维激光扫描仪(Riegl VZ-1000)是奥地利Riegl 公司具有全波形回波性能、实时全波形数字处理和分析技术的脉冲式扫描仪器,扫描距离范围达到1400m,并在100m距离处精度为5mm。
三维激光扫描系统主要包括三维激光扫描仪、外接电源、高清数码相机、笔记本电脑、充电器、电源线、网络连接线、专业三脚架和配套RiSCAN PRO软件[4]。如图1 所示为Riegl VZ-1000 三维激光扫描仪:

图1 Riegl VZ-1000 三维激光扫描仪
3 案例应用
2019 年7 月23 日21 时20 分许,鸡场镇坪地村岔沟组发生山体滑坡,由于持续降雨,山体含水量饱和出现土层崩塌易发生泥石流,并迅速转化为高速碎屑流。滑坡体横向距离约为600m,纵向垂直距离约为500m,斜距约为1650m,滑坡体面积约40 万m2,土方量大约200 万m3。如图2 为贵州水城7·23 特大滑坡现场。
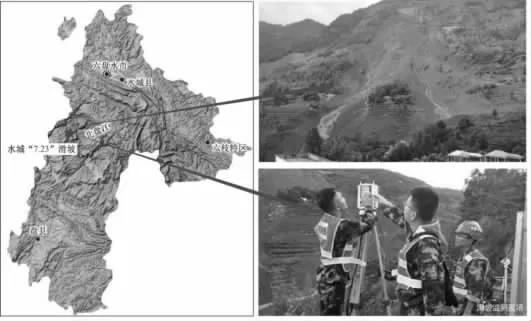
图2 贵州水城7·23 特大滑坡
3.1 外业数据采集过程。对贵州水城7·23 特大滑坡体点云数据的采集,采用Riegl VZ-1000 地面型三维激光扫描仪,采用固定单站坐标点的扫描方式,在同一位置对滑坡体进行多次扫描。在扫描时,以当天日期、前后期点云数据排序为数据命名的方式,进行点云数据的外业采集工作。
本次扫描区域包含整个滑坡体,该滑坡体山体表面的杂草相对较少,减少了数据点云在采集过程中的干扰,也为数据的预处理提供了方便,提高了数据点云的精确性和可靠性。本次共采集滑坡体点云数据11 期,其中7 月25 日下午采集五次,间隔0.5 小时采集一次;7 月26 日采集4 次,间隔4 小时采集一次;7 月27 日采集2 次,间隔3 小时;直至抢险救灾结束。
3.2 内业数据处理过程。滑坡体点云数据采集完后,利用RISCAN PRO软件对采集的点云数据进行预处理。数据处理过程主要有:多站点云拼接、噪点处理、点云滤波、数据的提取输出等。
(1)点云数据的拼接。在实地进行监测时,还需要对扫描设备进行多视角、多站点的扫描,才能获得完整的监测区域三维点云数据。在后续的点云数据处理过程中,将地面三维激光扫描的点云数据导入RISCAN PRO软件中,将布设测站控制点的坐标导入软件,导入时把测量坐标和扫描站点坐标一一对应,并注意坐标轴的转换及仪器的高度。根据扫描数据图形确定北方向,然后进行粗拼,根据不同测站点的相同特征点进行粗拼,为了提高粗拼精度,一般选取拐角点、墙角点、标语处等明显特征点进行拼接,粗拼接一般可达到厘米级精度。
(2)点云数据的滤波。点云数据滤波的目的是裁剪掉与所需滑坡体表面无关的点云。在点云数据获取的过程中外界环境因素的影响、边界阻塞、扫描目标的反射性差异和多路径条件下,使点云数据产生离群点、孔洞以及噪点等。在点云中最常见的是离群点,指偏离其余观测点而引起误差的观测值,主要表现为与邻近区域有出入且不符合所处局部的几何表面形态。点云粗差的存在会影响后续点云模型的建立和分析,因此点云数据滤波是点云预处理中必不可少的步骤。
在点云数据处理过程中,应根据实际情况对点云数据进行手动去噪等预处理。对原始数据采用手动编辑的方式去除明显的噪点和孤点,手动选取特定的扫描监测区域进行处理,即通过框选的命令把需要去除噪点的区域显示,通过旋转或平移从各个角度观看点云数据,方便对噪点数据的去除,高效的去除无关的噪点,得到高质量的点云数据。然后采用点云滤波处理非地面点云,得到去除噪点后的滑坡点云数据。如图3 为点云滤波前后的对比图。
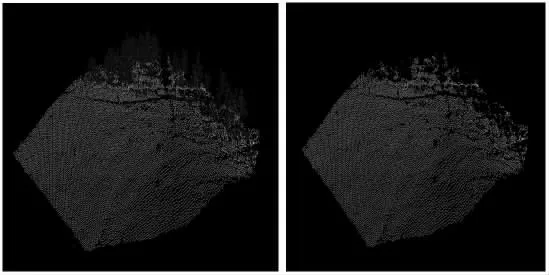
图3 点云滤波前后对比图
(3)点云数据的提取。将滑坡前后不同时段扫描的点云数据采用ICP 优化算法统一拼接坐标后,对不同时段扫描的点云数据进行提取,提取的滑坡点云数据能够真实反映滑坡的地表面特征状态。
三维激光扫描获取的点云数据是以*.RSP 的格式储存在RiSCAN PRO软件相应的文件下,并能够导出多种数据文件格式,如:ASCII、XYZ、SVY、PTS、PTX、TXT 等,以及Auto CAD 的DXF 格式。最常用为TXT格式的点云本文数据文件,文本内的每一行内容都可以被作为一个结构体存贮在结构体的数组中,通过读取*.txt数据中离散的三维点云坐标,导入三维建模软件进行三维模型重建。
3.3 建立滑坡模型。滑坡体点云仿真三维模型由点云生成的三维三角网来建立,其中在RiSCAN PRO软件中进行点云预处理操作后,为了优化滑坡模型的建模效果和精度,将数据导出为通用格式,在逆向工程软件Geomagic Qualify 2013 中进行建模处理。在Geomagic Qualify 2013 中导入坐标点数据重建滑坡三角网模型。并且对三角网模型进行优化,在软件中进行三角网格的检查和优化,删除拓扑错误的三角面,填充因数据缺失产生或之前删除三角面产生的孔洞。填充时对于较小的孔洞选择依曲率匹配到周围网格,对于直径超过10cm 的孔洞采取不填充操作,在后续的形变比较中作为不比较区域。为了便于滑坡体变形分析工作,对于滑坡表面散落的三角网进行简化或删除。
将前后两期的点云数据建立高精度数字高程模型,在同一坐标系下,将前后两期的DEM相减,可以高程变化得到整个滑坡监测区域变化显示。另外,通过RiSCAN PRO软件导出滑坡体点云数据,到Auto CAD中生成剖立面图、曲线图、三维变形曲面图来反应变形情况。如图4 所示,为贵州水城滑坡体点云DEM模型。
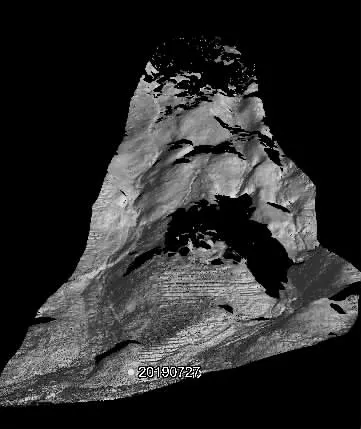
图4 贵州水城滑坡体DEM模型
4 滑坡体坡面分析
滑坡体的变形破坏及滑动产生的原因是由多方面的因素共同作用的结果,需要针对滑坡体进行监测分析。根据前面对贵州省7·23 特大滑坡体分析,根据图5(a)点云数据剖面图现场所测得的滑坡的高程数据绘制如图5(b)CAD滑坡体剖面图。
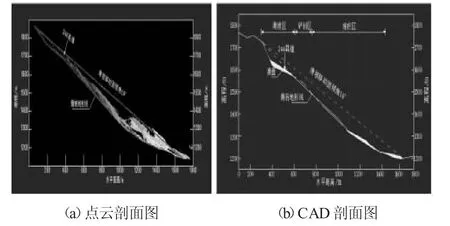
图5 滑坡体剖面图
5 结论
综上所述,三维激光扫描技术在灾后滑坡应急监测中的应用有着关键作用。三维激光扫描技术在滑坡监测中的应用解决了传统监测人员难以到达的危险区域作业的缺陷。从外业采集、内业处理对多期点云数据进行去噪、拼接、坐标转换和配准等处理,然后通过对处理后的点云数据进行面状变形的分析,证明了三维激光扫描技术应用在灾后滑坡体安全监测变形的有效性和可靠性。
猜你喜欢
地球科学与环境学报(2022年4期)2022-08-25
河北地质(2021年1期)2021-07-21
摄影之友(影像视觉)(2020年4期)2021-01-09
水利水电科技进展(2020年6期)2020-12-10
水电与新能源(2020年10期)2020-11-05
影像视觉(2020年4期)2020-05-09
制导与引信(2017年3期)2017-11-02
摄影之友(影像视觉)(2017年3期)2017-04-28
北方交通(2016年12期)2017-01-15
山东青年(2016年3期)2016-02-28
