
超声C扫描检测自动扫查装置的设计*
2020-11-27 10:04:40万本例
机电工程技术 2020年10期
宋 成,赵 泓,万本例,胡 斌
(中国特种设备检测研究院,北京 100029)
0 引言
超声C 扫描是一种沿垂直于声束横截面进行二维扫描的检测模式,可以通过数控扫描系统,运用插补原理实现各种轨迹的扫描。在自动检测中,通常采用水浸聚焦探头进行水浸扫描。
C 扫描检测需要检测探头在工件表面进行迂回型运动,如图1 所示,同时探头运动过程需要很高的稳定性来保证探头与工件的良好耦合,因此,需要设计一种性能可靠的C扫描自动扫查装置,可携带C 扫描探头稳定地吸附在工件表面,并在工件表面纵横两个方向上都能进行稳定运动。
可用于超声C 扫描检测的爬壁机器人分类众多,按照吸附方式的不同,可以分为负压吸附、电磁吸附及永磁吸附;按照行走方式的不同,可以分为履带式、轮式及足式。承压设备大多采用铁磁性材料,因此,本设计采用永磁轮吸附式结构,该种技术方案具有吸附可靠、相同质量下磁吸附力大、运动速度快、转向灵活等优点。
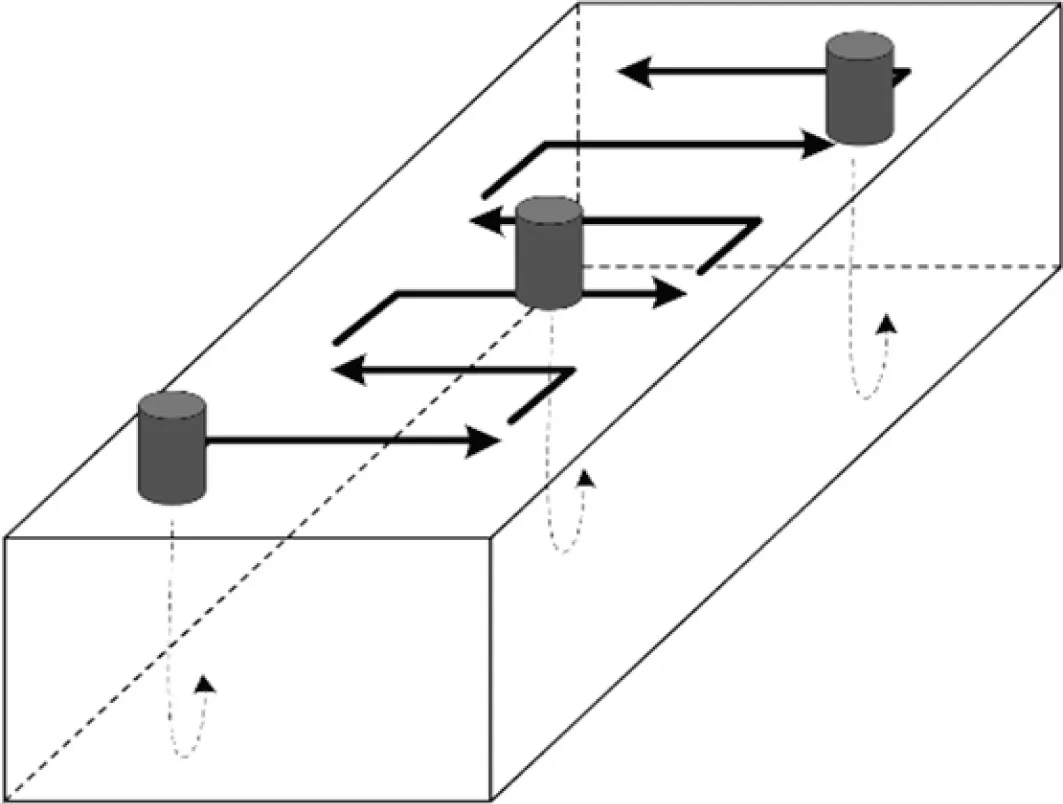
图1 超声C扫描检测探头扫查路径
从文献及报道方面看,国外一些采用磁吸附形式的爬壁机器人研究已经成功应用到工业超声、涡流等无损检测领域,但研制成型的设备由于技术壁垒大都售价高昂。国内对于超声C 扫描检测采用的这种磁轮吸附式结果还很少有实际应用,这方面的机械结构及自动控制装置的研究也很少[1-3],因此,对承压设备的超声波C扫描自动扫查机器人的研究是十分必要的。
1 扫查装置结构设计
1.1 装置总体结构
超声C 扫描检测针对的承压设备材质基本上是铁磁性材料,所以吸附方式选择永磁吸附。本扫查装置整体机械结构如图2所示,整个扫查装置结构按功能可分为3部分:纵向运动机构、横向运动机构、探头夹持臂。其中纵向运动机构是整个扫查装置的行走驱动机构,由主壳体、传感器模块和4个磁性轮组成,整个机构靠4个磁轮的吸力吸附在铁磁性材质的待检设备外壁,由磁轮的运动带动机器人前进、后退,以及调整机构的位置和方位,其中前两个磁性轮为驱动轮,分别由两个直流电机驱动,机构直线运动时两电机设置为相同转速,当需要改变行走方向时依靠内部单片机控制两电机形成速度差,从而改变爬行运动方向。当左边的驱动轮速度大于右边驱动轮的速度时,机器人向右偏转;反之,向左偏转。
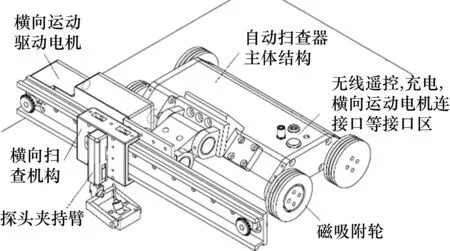
图2 自动扫查装置整体外观结构
1.2 磁轮材质及结构设计及仿真
磁轮吸附组件是爬壁扫查装置的重要结构,应产生足够的吸附力,以克服检测探头和装置本体的重量,保证装置在壁面上可靠工作。本装置磁轮采用钕铁硼材质的磁铁,钕铁硼三元系永磁材料商品化性能最高,机械加工性能好。本装置选用的磁铁型号为N45,属于高磁能积性磁铁。
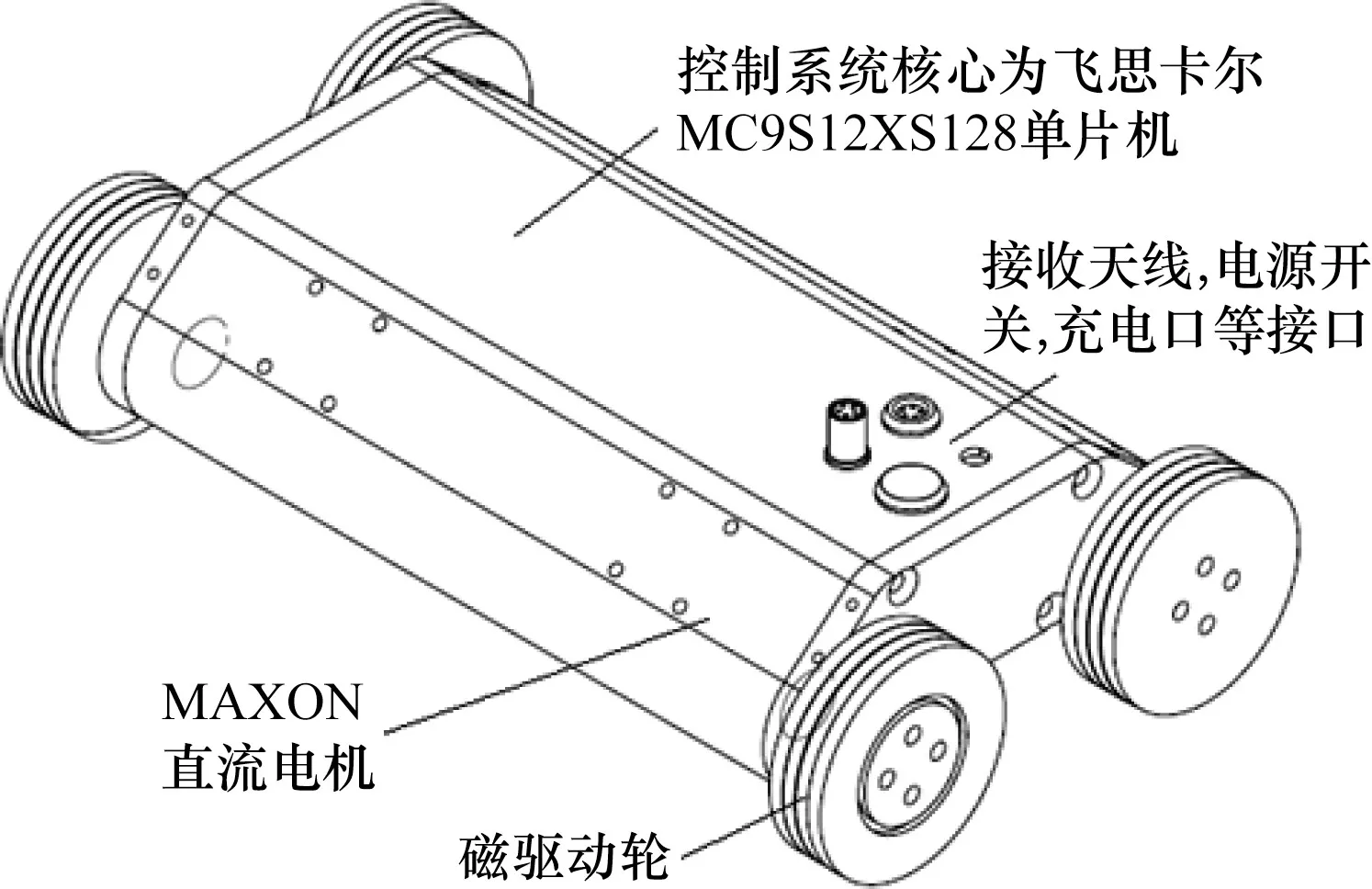
图3 自动扫查装置纵向运动机构
装置磁轮选用尺寸规格为φ58 mm×5 mm的圆环性结构,永磁材料是比较脆的材料,磁轮直接与工件表面接触行走过程中容易磨损磁轮及工件表面防腐层,为提高使用寿命,在磁轮外弧面加一层1 mm厚聚氨酯包胶,同时在磁轮两侧贴合安装两片规格为φ60 mm×2 mm的碳钢圆片。这样在保证装置具有足够吸附力的同时也避免了磁轮与工件的磨损[2]。
另外,由于扫查装置速度低,可以近似地看作静态磁场。本文采用FORCES BY VIRTUAL WORK 和Ansoft Maxwell应力张量法分别对磁吸附力进行仿真求解。
首先建立模型(图4),对模型中的磁铁、工件和空气3种材料进行定义。仿真软件中自带有N45 型钕铁硼永磁材料、铁以及空气,所以只需选择相应的介质材料即可。然后进行相应边界条件设置、网格划分、参数选择和求解设置等,分别采用Maxwell应力张量法和虚拟做功法两种不同求解计算方法[4-5]。
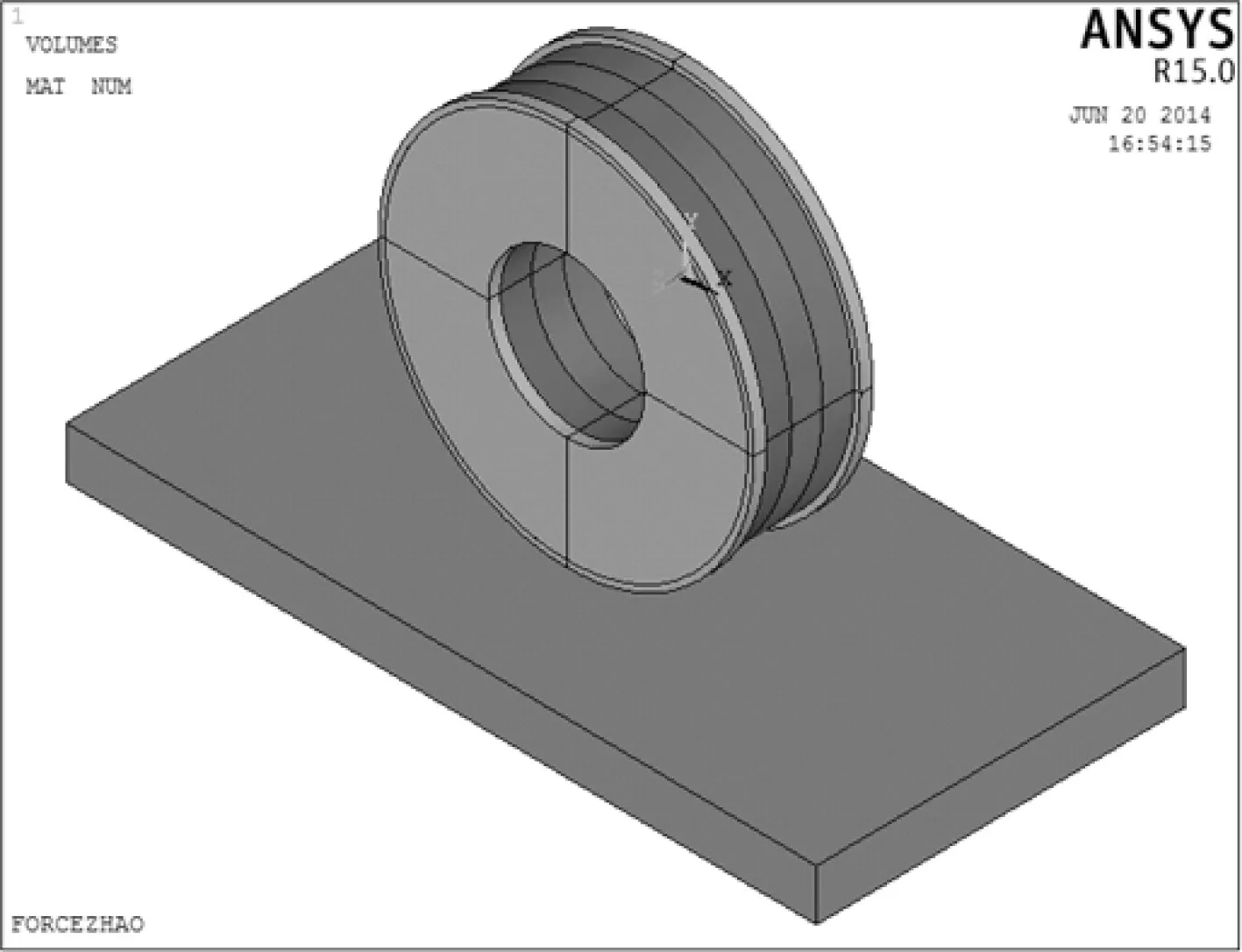
图4 磁力仿真模型
仿真分析得出以下结果。
(1)磁铁两侧钢导轮壁厚与磁轮的磁吸附力关系如图5所示,磁力的吸附力随着钢导轮壁厚增大而增大,因此单个磁导轮的厚度对吸附轮影响很大,钢导轮壁厚的选择需要根据扫查装置的整体重量确定。
(2)工件厚度与磁轮吸附力的关系如图6 所示,工件的厚度对磁力的影响不是太大,因为磁力线主要集中在工件表面与磁轮接触的小部分区域,进入工件深度范围很小。
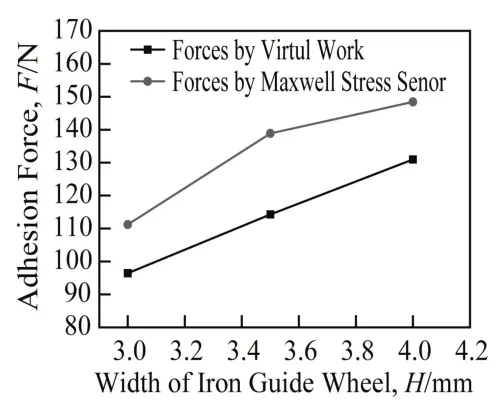
图5 钢导轮厚度对磁轮磁力的影响
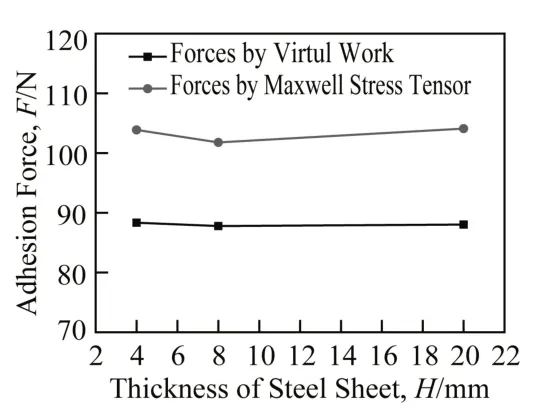
图6 钢板厚度对磁轮磁力的影响
采用Maxwell应力张量法求解计算,得出磁铁与工件吸附力为78.2 N。当扫查装置满载质量为10 kg时,磁轮和工件表面的摩擦因数为0.75。磁轮与工件的摩擦力55.8 N(虚拟做功法),4 个磁轮摩擦力为223 N,大于机器人重量78.4 N,所以扫查装置在检测过程中能够牢牢吸附在工件表面上,保证超声检测的正常工作。
1.3 横向运动机构的设计
横向运动机构的主要功能是携带相控阵C 扫描检测探头,并可在与主壳结构运动方向垂直的方向上进行独立的横向运动,使探头进行C 扫描扫查检测。横向运动结构与扫查装置通过铰链刚性连接,需要调整横向结构的安装位置时只需拧松铰链上紧固螺钉即可使横向结构与扫查装置主壳成柔性连接,待横向结构调整到位再锁死紧固螺钉。
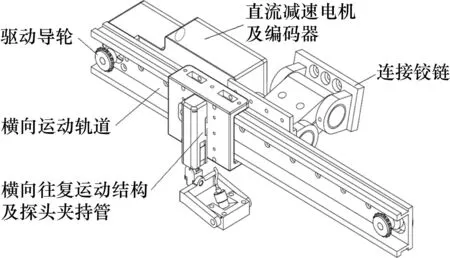
图7 横向运动机构
1.4 纵向运动直流电机及减速机的选型
已知参数如下:
(1)扫查装置总质量M=10 kg(满负荷),其中横向滑块及所携带夹持臂探头等附件总质量为2 kg;
(2)纵向机构最高行走速度v=6 m/min,横向机构最高移动速度v=3 m/min;
(3)纵向运动机构永磁轮直径d=0.060 m,横向运动机构带轮直径d=0.025 m。
每个永磁轮的输出转矩为:

式中:k0为安全系数,k0=1.5。
每台直流电机的额定功率为:


式中:n1为永磁轮转速,r/min;n2为横向运动带轮转速,r/min;
求解以上公式可得:纵向运动机构所需电机扭矩为2.2 N·m,功率为11 W;横向运动机构所需电机扭矩为0.2 N·m,功率为1.2 W。
根据上述计算结果[6],本课题选择Maxon微型直流减速电机,其性能参数如表1 所示,纵向运动机构电机选用Maxon DCX 系列B75D3C441463 型电机,本款电机额定功率22.7 W,减速器最大输出扭矩3.3 N·m;纵向运动机构电机选用Maxon DCX 系列B72DB9E403F6 型电机,本款电机额定功率15 W,减速器最大输出扭矩2 N·m;满足本扫查装置许用要求。
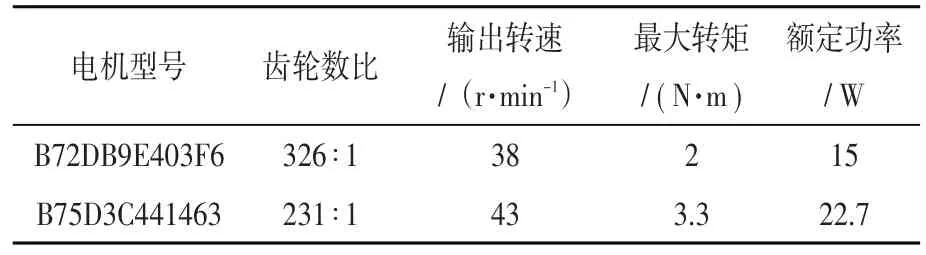
表1 Maxon DCX 系列直流电动机性能参数表
1.5 探头夹持臂
探头夹持臂结构如图8 所示,滑轨及压缩弹簧构件可使检测探头在垂直方向有一定调整空间,可适应较粗糙的工件表面;楔块夹持块可使探头在横向范围内有一定角度的变化,使探头和工件更好地耦合。
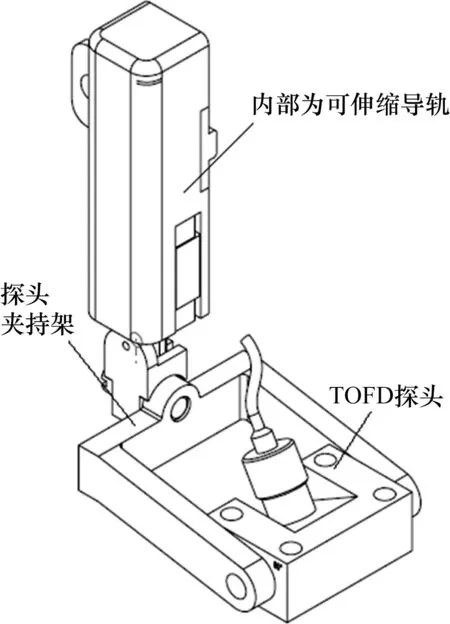
图8 探头夹持结构
2 扫查装置运动控制系统
本扫查装置控制系统硬件部分采用飞思卡尔MC9S12XS128 单片机,控制模块分为纵向运动模块、横向运动模块、无线遥控模块、编码器等,控制系统结构如图9所示。
系统控制软件采用C 语言编程,开发环境为CodeWarrior。系统具体控制流程:根据超声检测C 扫描检测扫查路径,扫查器前进一段距离后暂停,然后横向运动机构启动,探头沿着滑轨从左端移动到右端后暂停,扫查器接着前进一段距离后暂停,横向机构再次启动,探头沿着滑轨从右端返回到左端停止,扫查器纵向及横向运动机构按照此运动路径循环进行,直至完成整个工件平面的C扫描检测[7]。
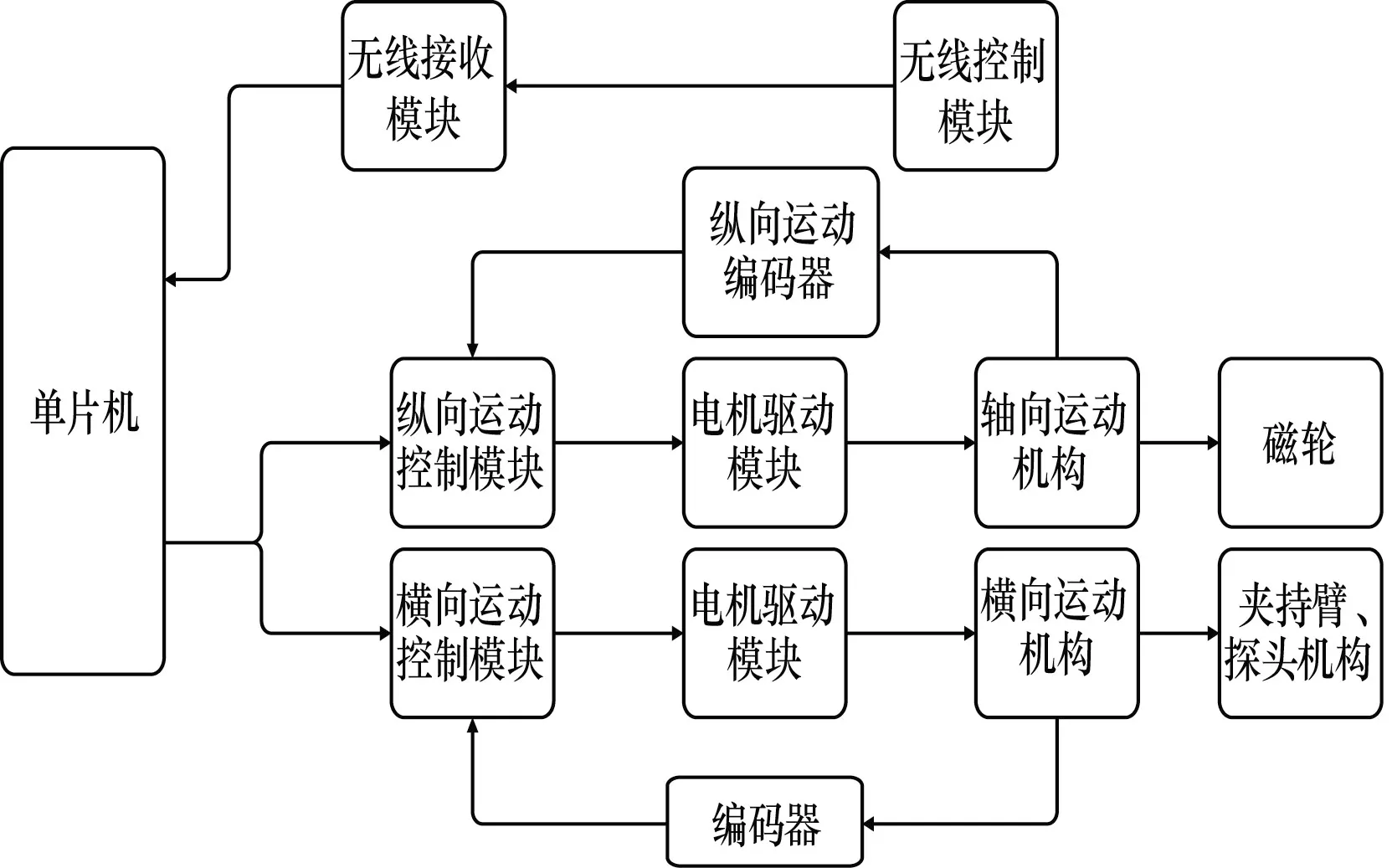
图9 控制系统结构图
单片机通过315M超外差无线接收及发送模块可对自动扫查器运动模式进行实时无线遥控控制,可遥控控制扫查器启动爬行、停止、转向、加速、减速等运动行为。
3 结束语
按本文介绍的超声C 扫描检测自动扫查装置的结构,研制了样机,进行了现场测试试验。测试试验表明,这种采用以单片机为控制核心的磁吸附式C 扫描检测自动扫查装置是可行的。该装置结构简单,控制系统可靠,可根据实际工况调整纵向步进、横向扫查速度,扫查范围等参数;顺利实现扫查运动和调整运动,并达到超声C 扫描检测扫查所要求的运动精度。
猜你喜欢
英语世界(2023年11期)2023-11-17 09:24:24
电力安全技术(2023年7期)2023-08-28 08:00:24
船海工程(2022年6期)2023-01-02 13:05:12
设备管理与维修(2021年17期)2021-11-02 11:15:28
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
机电工程(2020年10期)2020-11-04 01:29:46
石家庄铁道大学学报(自然科学版)(2020年4期)2020-02-22 01:39:48
中国特种设备安全(2019年1期)2019-03-13 01:05:52
无损检测(2016年8期)2016-08-30 03:01:04
