数字图像识别处理技术在小型水库水位观测中的应用
2020-11-24 07:26钟卓
水利规划与设计 2020年11期
钟 卓
(辽宁省本溪水文局,辽宁 本溪 117000)
1 问题的提出
辽宁省小(1)和小(2)型水库分别为273座和412座,小型水库汛期水位观测时掌握当前水库汛期特点,做好防汛决策的关键。辽宁省小型水库水位目前是通过人工观测方式进行,这种方式需要消耗大量的人力和物力,时效性也很难得到有效保证[1]。近些年来,雷达超声波技术在水库水位自动观测中得到推广和应用,但是由辽宁省小型水库所在的区域地形和气候的综合影响,水位自动观测设备的信息较易失真,影响水位观测的精度,此外,雷达超短波水位自动观测设备也会增加小型水库的运行成本[2]。随着电子信息化技术的快速发展,数字图像识别技术逐步在水利领域中得到应用[3- 9],在水位观测的应用也在近些年得到研究,李翊[10- 11]结合数值图像处理技术对河道水尺刻度进行识别,但该技术对水尺整洁度要求较高,并对图像观测设备的安装标准较高。王伟等[12]通过阈值分割和二值化方法对河岸图像进行处理,对河岸水位进行推算,但由于河岸和水面边缘的影响,使得计算误差较大。为降低外界影响因素对数字图像识别处理的影响,本文结合数字图像信息处理数据,采用水位推算公式[13]对水位进行识别,并针对传统夜间图像观测识别误差大,引入一种基于引导滤波和全局对比度的夜间图像增强算法[14- 15],改进夜间水位图像观测精度。研究成果可为小型水库日常水位自动观测提供一种新的手段。
2 研究途径
采用最大类间方差方法对水位尺图像进行技术处理,该算法将初始水位尺图像根据初始阈值划分成两类,对不同类图像的灰度值进行进行阈值的更新,并计算不同类间方差,当计算值最大,其阈值为最佳值,具体计算步骤为:
(1) 首先对灰度直方图进行归一化处理,图像灰度直方图概率分布计算方程:
pi=ni/N
(1)
式中,i—像素等级;ni—像素等级i的像素点的个数;N—图像处理后的像素点的总数。
(2)对像素处理的分布概率ωi(t)和ui(t)的类均值进行初始化,分布概率和类均值的计算方程为:
(2)
(3)
式中,ω1—第一类分布概率初始值;ω2—第二类分布概率初始值;L—总的灰度级。 两个图像灰度分类的类均值计算方程分别为;
(4)
(5)
式中,μ1、μ2—第一类和第二类均值。
(3)图像识别的平均灰度值计算方程为:
(6)
(4)对不同类的方差进行计算,计算方程分别为:
(7)
(8)
式中,σ1、σ2—第一类和第二类的方差,在各类方差计算基础上,分别对类内和类间的方差进行计算,计算方程分别为:
(9)
(10)
式中,σω、σB—类内和类间的方差;k—不同分类;T—整个灰度等级。 在类内和类间方差计算基础上,对整个灰度等级方差进行计算,方程为:
(11)
式中各变量同其他方程变量含义一致。在总灰度计算的基础上,通过计算最佳的阈值,来对水位尺图像进行分隔处理,最佳阈值的计算方程为:
(12)
式中,S—最佳计算阈值。通过计算阈值对其液面与水尺交界处的水尺读数进行提取。
此外考虑到夜间图像识别的误差问题,采用引导滤波和全局对比度的夜间图像增强算法,对夜间水位尺图像进行增强处理,其主要的及时流程如图1所示。
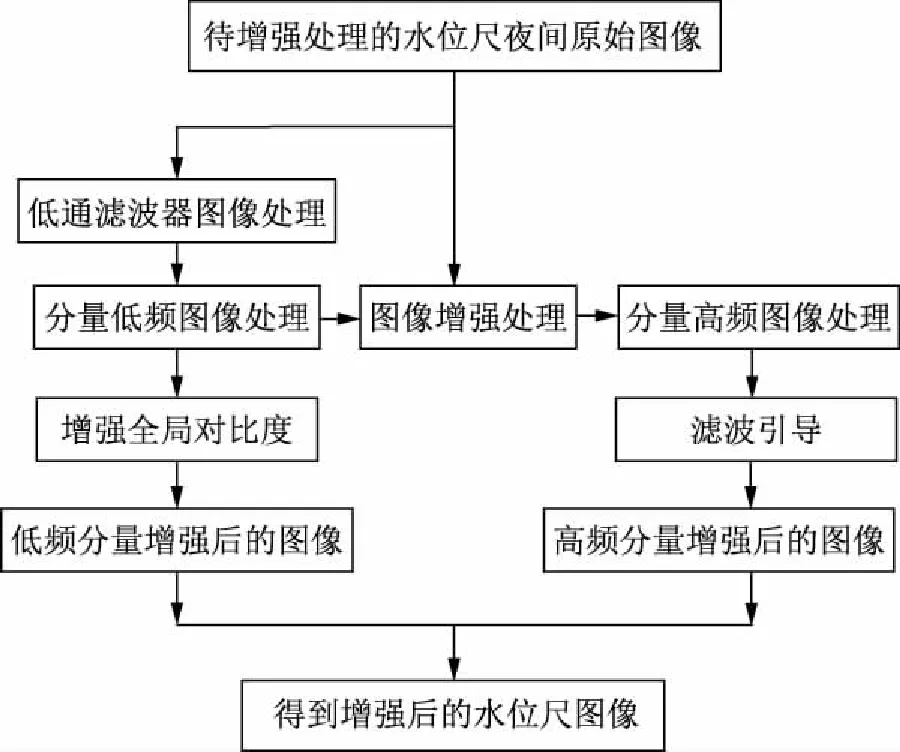
图1 基于滤波和全局对比算法的夜间水尺增强流程图
3 具体实例分析
以辽宁本溪地区小型水库为研究实例,水库为小(1)型水库,集水面积分别为20km2,水库主要功能是防洪和供水,校核洪水为为326.26m,当前水库的主要水位报汛方式主要是当地库管员通过人工观测后,结合手机报汛系统,按报汛时间发送当前水位。这种方式存在时效性不高的问题,尤其是在防汛关键期,若不能及时报汛水库水位,难以支撑水库下游防汛决策。从2018年开始,在水利部技术推广项目中,重点推广应用数字图像处理方式进行水位自动观测的一种方式,作为试点水库,开展了该水库数字图像水位观测的应用试验,结合数字图像处理的水库水位数据和人工观测的水位数据,分析水位观测误差。
4 问题解决效果对比
4.1 不同图像处理算法的误差对比
结合常用的4种图像处理方式,对比分析了白天水库不同水位级下的水位识别值和人工观测值之间的误差,误差结果分别见表1,各图像处理结果如图2所示。
考虑到不同水位级对图像处理数值读取的影响,分别采用该水库高、中、低三个水位级对不同算法下的水位值识别误差进行分析,数字图像的原理采用通过图像识别后,通过灰度处理,经过不同算法分析后,对其进行水位数值的识别,当前在图像处理中常用的算法有本文涉及的6种,单通道和双通道算法下通过灰度处理对其水位刻度尺数值进行分析,如图3中的单通道和双通道算法处理效果,但这两种算法不同水位级下的误差在-0.81~1.36m之间,总体水位观测误差较大,而融合算法下由于去除了边界颜色的影响,各水位计下的误差值都较单通道和双通道有所好转。该算法下水位和人工观测水位误差在0.6~1.79 m之间,低水位下误差值最大,高水位下误差有明显改善。引导滤波算法下相比于前四种算法在水位误差识别上有着明显改善,在高、中、低三个水位级下对比误差在0.36~0.37之间,基本可满足水位观测的误差范围要求,且在不同水位级下误差差距较小。本文算法结合律引导滤波算法的优点,并通过分量低频处理,改进了水位识别的误差效率,相比于其他算法,水位观测误差得到明显提升,可有效满足水库水位观测的精度需求。
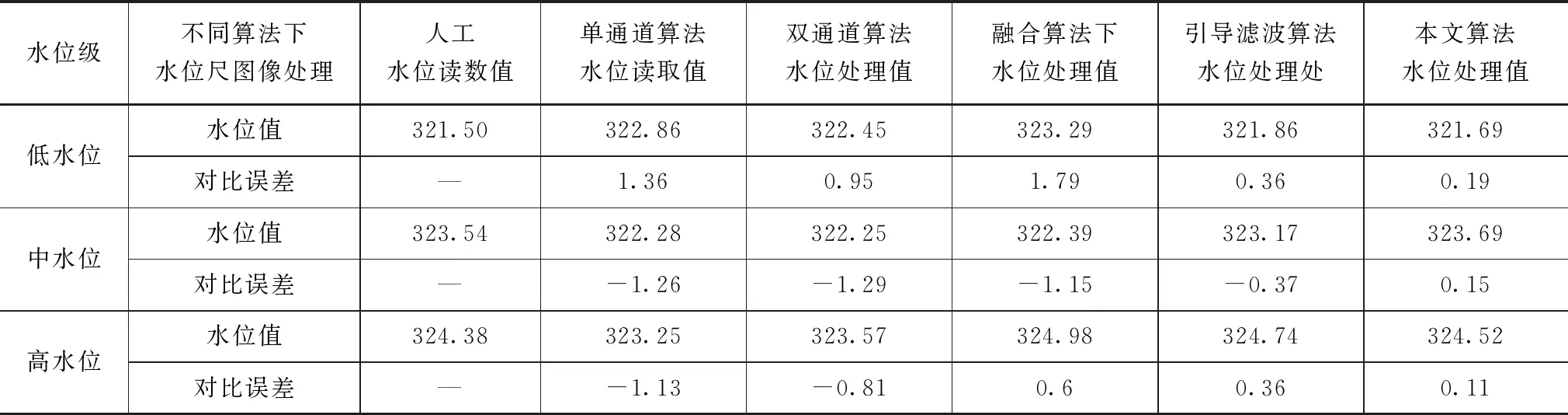
表1 不同图像处理算法下低水位数值误差对比结果 单位:m
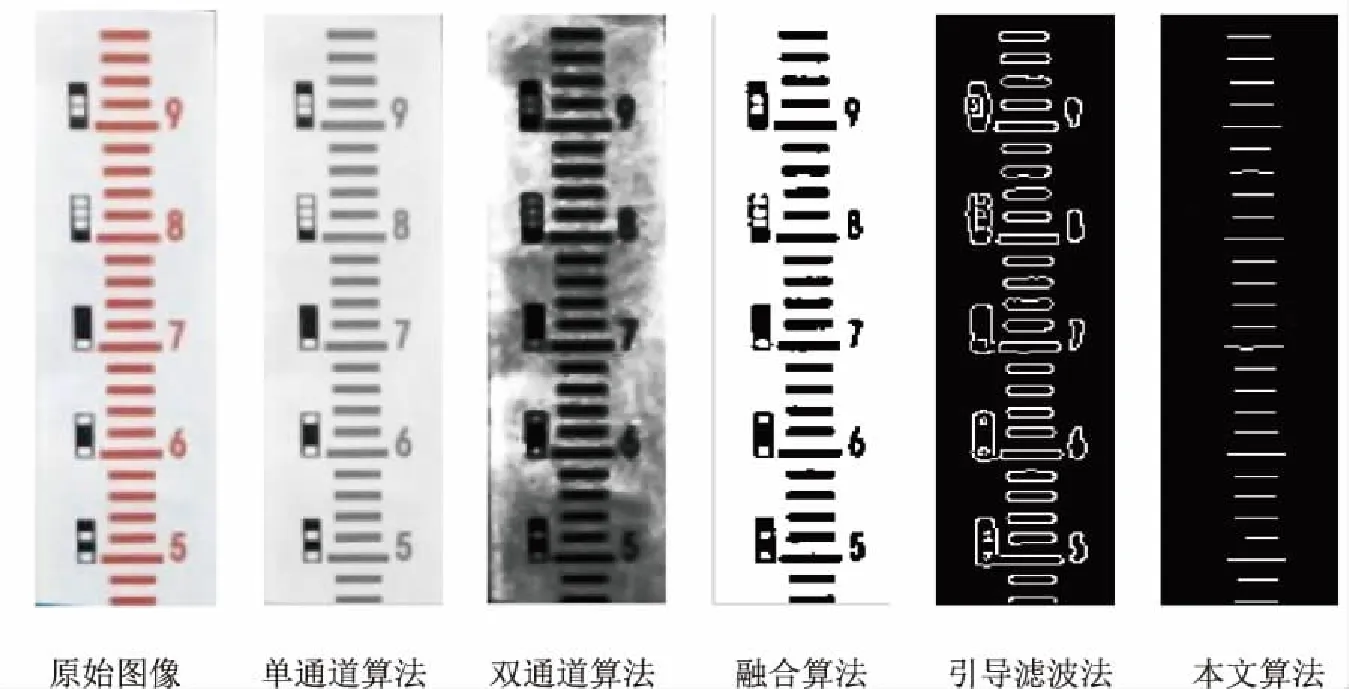
图2 水库不同算法水位尺图像处理结果
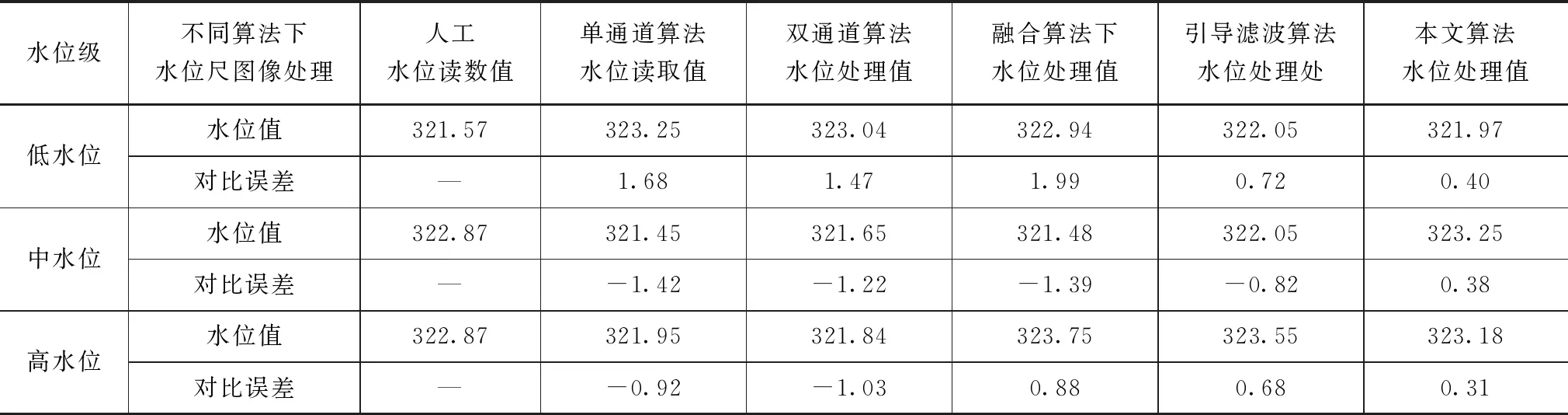
表2 夜间各水位级下不同算法下图像处理水位误差对比结果 单位:m
4.2 夜间水位尺图像误差对比结果
夜间水位尺识别误差要低于白天,对不同水位下夜间各水位级的观测误差进行了对比分析,结果见表2,并对比改进算法前后对水位尺的图像增强效果,如图3所示。
夜间水位尺识别误差是检验图像处理技术的重要标准,从误差分析结果可看出,采用各算法下夜间水位尺识别误差较白天都有所增加,这主要是因为夜间水位尺受到光度影响,图像识别误差势必增加。从误差分析结果可看出,本文主要针对传统算法夜间水位尺识别误差较大的问题,对不同分量高频和低频图像进行全局图像增强处理,使得高频和低频图像效果得到增强,图4为图像增强处理后的效果,从图像识别增强处理后,可以对水位尺的刻度进行有效识别,从误差分析结果可看出,在夜间,本文算法下的误差值也明显低于其他算法,可见采用图像增强处理后,可以降低夜间的水位尺识别误差。
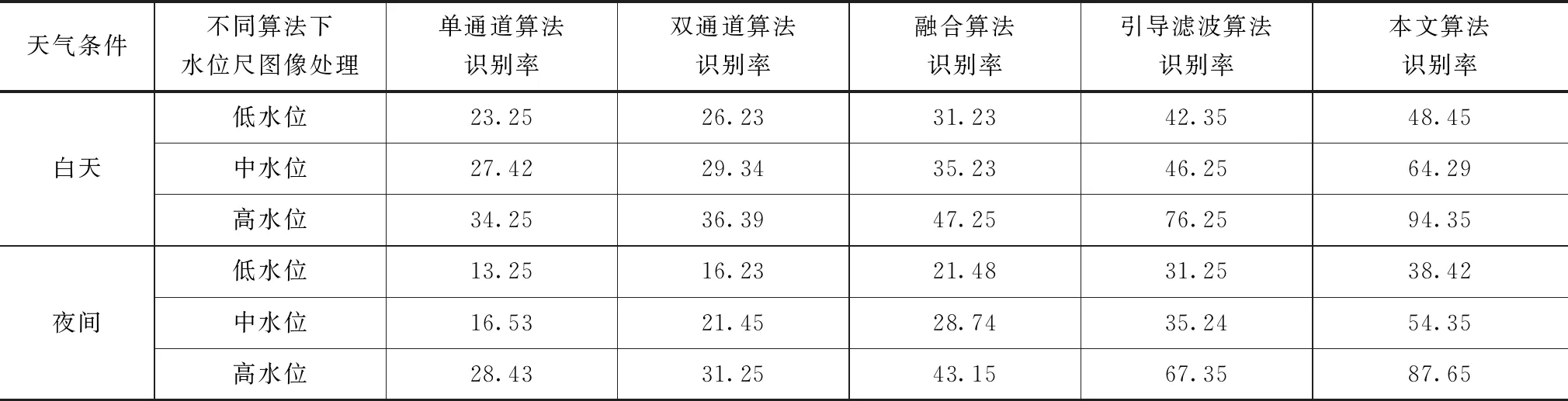
表3 不同天气条件下各水位级下不同算法处理的水位识别率对比结果 单位:%

图3 本文改进算法下的水位图像夜间增强效果
4.3 不同图像处理方法下水位识别率分析结果
对不同图像处理方法的各水位级下的图像识别率进行定量分析,分析结果见表3。
从对比结果可看出,夜间各算法下图像识别率要明显低于白天条件下的水位尺图像识别率,在白天天气条件下,各算法不同水位的水尺识别率在
23.25%~94.35%之间,单通道算法识别率最低,本文算法由于融合了各算法的优点,在低水位的识别率也可以达到48.45%,而在夜间天气条件下,各算法下的水位尺识别率有所降低,本文算法下各水位计下的图像识别率在38.42%~87.65%之间,可满足水库水位识别的规范要求。
4.4 水位尺图像处理不同算法下最优灰度和梯度分析
水位尺图像处理主要结合灰度处理原理,并对灰度的梯度进行优化,本文对不同水位级各算法下的最优灰度及梯度进行了分析,结果见表4。
水位尺图像的像素处理主要通过调整图像的灰度值进行分析,未经过图像处理前,原始图像的灰度值范围在0~0.2之间,从分析结果可看出,单通道、双通道以及融合算法下图像最佳灰度值未得到明显的改善,为采用引导滤波和本文算法下的对灰度的差异度进行了明显的提升,并对图像的目标和标尺进行了不同灰度的区划,此外从表中还可看出在不同水位级下本文算法对图像离散度有所增强。图像最佳梯度是反映对水位尺图像纹理以及对比度的定量分析指标,从最佳梯度的分析结果可看出,相比于其他算法,引导滤波算法和本文算法在各水位级下的最佳梯度都有所减少,从最佳梯度的变化情况而言,采用引导滤波算法和本文算法对水位尺图像边缘识别更为清晰,有助于对水位尺边缘刻度的分析。

表4 不同水位级下水位尺图像最佳灰度和最佳梯度值
5 结语
(1)对低频图像进行全局增强对比度,采用引导滤波对高频图像进行处理,可有效增强夜间水位尺的识别效果,相比于传统图像处理方法,夜间水位尺识别率平均可提高30%以上。
(2)在采用本文算法进行水库水尺图形处理时,建议最佳灰度值为0.2175(低水位)、0.3394(中水位)以及0.3743(高水位),结合水库实际情况,在该范围内进行调整,调整幅度在±0.5之间。
(3)本文未考虑其他天气条件下对水库水位图像识别率的影响,尤其是雨天天气条件下,在以后的研究中还应考虑复杂天气条件下对水库水位图像识别的影响,增强算法的适用度。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
网络安全与数据管理(2022年2期)2022-05-23
中国交通信息化(2022年2期)2022-04-26
现代临床医学(2022年2期)2022-04-19
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
电子制作(2019年16期)2019-09-27
电子制作(2019年15期)2019-08-27
电子制作(2018年19期)2018-11-14
电子制作(2018年18期)2018-11-14