
基于自主巡检模式下的电力导线通道障碍物快速巡检研究
2020-11-23 07:32杨嘉妮钟玉琦黄巧妍
机电信息 2020年29期
杨嘉妮 钟玉琦 黄巧妍
摘要:详细阐述了电力导线通道障碍物快速自主巡检方案。该方案首先基于无人机搭载激光雷达采集导线通道点云数据,然后利用Hough变换法识别图像中的电力通道导线,最后为树木等障碍物构建空间检索结构BDtree,对比电线点云与障碍物点云的距离,将位于导线通道危险距离之内的物体视为障碍物。此方案节省了人工野外排查导线通道的时间,对保障电力系统安全运行具有重要意义。
关键词:电力导线;通道;点云数据;障碍;巡检
0 引言
电力系统输电导线通道障碍物排查已经全面进入自动巡检阶段,自动巡检主要以无人机搭载数据采集系统的方式实现。无人机搭载图像采集设备与图像处理系统,可以快速识别导线通道中是否存在障碍物。近几年,机载激光雷达测量技术快速发展,在室外电力自主巡检中应用广泛[1]。本文主要介绍如何使用机载激光雷达快速获取电力导线通道障碍物情况,以便高效率完成电力导线通道障碍物排查工作。
1 电力导线通道障碍物快速巡检方案设计
为实现远距离、大范围的输电导线通道障碍物快速自主巡检,本文以无人机搭载激光雷达的方式,设计了导线通道点云数据采集方案。激光雷达系统置于无人机下方,飞行高度区间为[15 m,200 m],飞行速度控制在[10 m/s,15 m/s],以免无人机高速飞行导致点云數据采集不精准[2]。
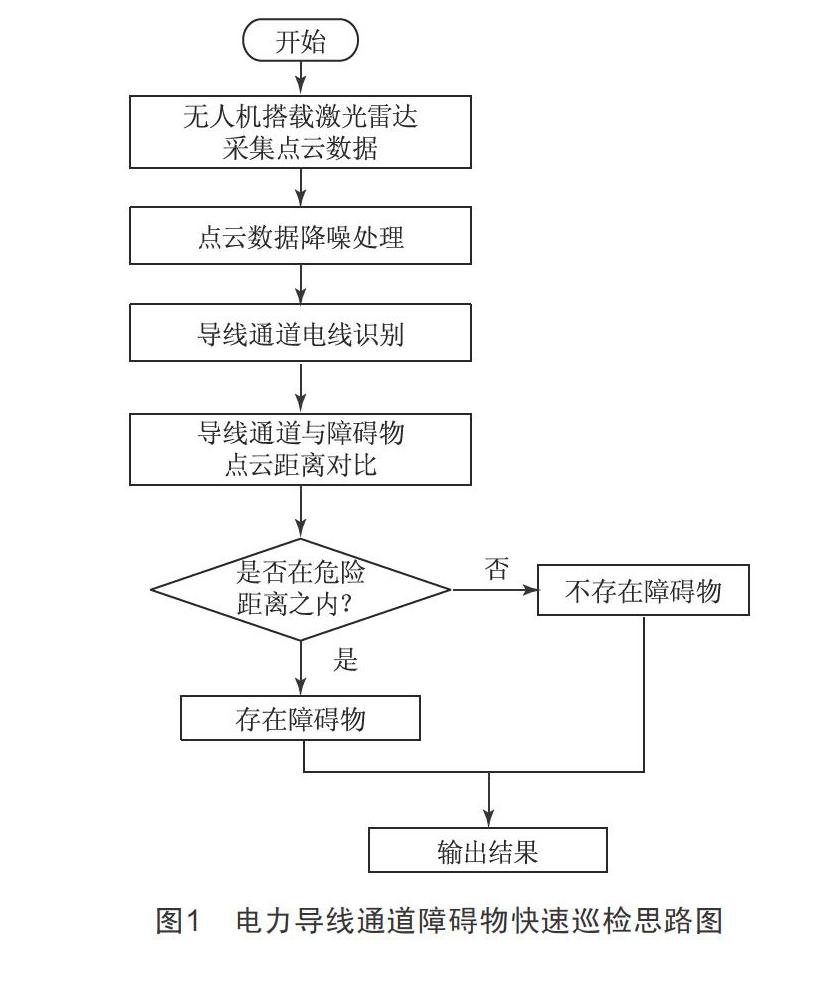
无人机搭载激光雷达系统快速巡检电力导线通道障碍物的设计思路如下:(1)经过外业数据采集获得大规模导线通道点云数据,以LAS文件格式存储;(2)对点云数据进行降噪预处理,减少散乱点、空洞点数量,降低导线特征提取的难度,同时,对点云数据中的电线、杆塔、树木等物体进行分类;(3)运用特征提取算法检测电力导线,判断导线通道中是否存在障碍物。电力导线通道障碍物快速巡检思路如图1所示。
2 导线通道障碍物识别算法
2.1 基于Hough变换的导线通道电线识别
鉴于光线遮挡、设备自身等因素,会引起激光点云噪声量大,所以原始点云需要经过降噪处理才可作为有效的数据使用。基于最小二乘原理计算噪声点的距离最小值,预先设置一个距离阈值,将大于阈值的部分视为噪声点,将其删除[3]。
接下来采用二维图像特征提取算法识别导线通道中的电线,所以需要将去噪处理后的三维导线通道点云数据转换为二维图像模式。定义一个二维图像命名为(Xmax-Xmin)×(Ymax-Ymin),其中,图像水平向区域界限为Xmin、Xmax,垂直向区域界限为Ymin、Ymax。为获得三维点云数据的平面位置坐标数据,需归一化三维点云坐标,将灰度值设为255。另外,将点云的平面坐标信息同步到动态数组内,为后期查询坐标信息提供便利。平面(a,b)点归一化的方法与结果:
2.2 通道障碍物识别与检测
一般而言,电线包含的激光点约在几千个左右,而植被、树木等其他可能性障碍物的激光点规模可达数十万甚至百万个。点云数据的优点是可以对比点之间的距离,所以计算电线与其他物体的点云数据距离即可判断导线通道上是否存在障碍物[4]。此处引入“空间检索结构BDtree”,为检索到导线通道附近的树木等物体构建空间检索结构BDtree,对电线激光点云实施遍历操作,寻找是否有存在“危险距离”之内的物体,如果有,则视为电力导线通道的障碍物,如在“危险距离”之外则可忽略。电力巡检管理人员在计算机端即可查看导线通道提取结果以及通道障碍物巡检结果,进而做出是否到场维修的决策。
3 结语
电力系统导线通道障碍物自主巡检模式得到了广泛运用,如何提高巡检过程中障碍物目标检测的精度十分关键。本文设计的电力导线通道障碍物巡检方案主要有两点优势:
(1)利用激光雷达系统采集目标物的点云数据,可以获得目标物的准确位置,通过对比物体间的距离判断导线通道的障碍物情况。
(2)将三维激光点云转换至二维平面坐标中,利用擅长提取直线的Hough变换法提取电线信息,降低了大规模点云数据运算的难度,提高了运算效率。但本文提出的方案仍存在一些不足之处,需要在未来的研究中持续改进,例如点云数据去噪应更加细化、高效,以减少噪声点对电线信息等提取的干扰。
[参考文献]
[1] 王柯,许淑淑,许志海,等.基于三维点云电力线路廊道障碍物检测流程与质量分析[J].矿山测量,2017,45(6):76-79.
[2] 李朋月,郝向阳,李建胜,等.无人机影像中直线类电力线检测算法研究[J].电子测量技术,2019,42(19):148-153.
[3] 李泊,陈诚.面向航拍图像的农村配电网导线断股检测[J].中国电力,2019,52(1):82-87.
[4] 周小红,李向欢,石蕾,等.无人机倾斜摄影技术在电力巡线树障检测中的实践应用研究[J].电力大数据,2019,22(8):53-59.
猜你喜欢
疯狂英语·新阅版(2021年9期)2021-10-30
时代英语·高一(2019年1期)2019-03-13
知音海外版(上半月)(2017年7期)2017-07-20
科学与财富(2016年21期)2017-03-02
中国新通信(2016年23期)2017-03-01
中国高新技术企业(2016年34期)2017-02-10
电脑知识与技术(2016年27期)2016-12-15
文史杂志(2016年6期)2016-12-03
考试周刊(2016年79期)2016-10-13
爆笑show(2015年1期)2015-03-26
