基于机器视觉的图像处理技术识别锂电池极片的缺陷*
2020-11-18 23:19李林升
机械研究与应用 2020年5期
邬 博, 李林升
(南华大学 机械工程学院,湖南 衡阳 421000)
0 引 言
锂电池作为一种动力电池,与其他动力电池相比,锂电池具有污染性小、能量密度高、体积小以及寿命长等特点,是国内外动力电池发展和应用的一大趋势。锂电池表面出现任何损坏都会严重影响锂电池使用的安全性和寿命,因此在生产过程中还需要对电池极片表面缺陷进行检测。目前,许多锂电池制造厂家采用的仍是传统的缺陷检测方法,即利用人眼对锂电池极片进行缺陷检测。但人工检测不仅容易受到主观因素上的影响,还会损害工人的健康,不能满足大批量的生产需求[1]。
笔者运用机器视觉结合数字图像处理技术开发了一套锂电池极片表面缺陷在线实时检测系统。该系统可以检测出锂电池极片表面缺陷的轮廓,并可以准确的计算出轮廓的长度和面积。
1 系统结构
此系统对锂离子电池的质量判断的整个过程分为图像获取、图像处理、缺陷轮廓检测及其面积计算。算法流程如图1所示。以极耳切割机为硬件平台搭建了一套嵌入式的视觉检测系统,以实现全自动的流水线检测锂电池极片的缺陷,完善设备的功能。
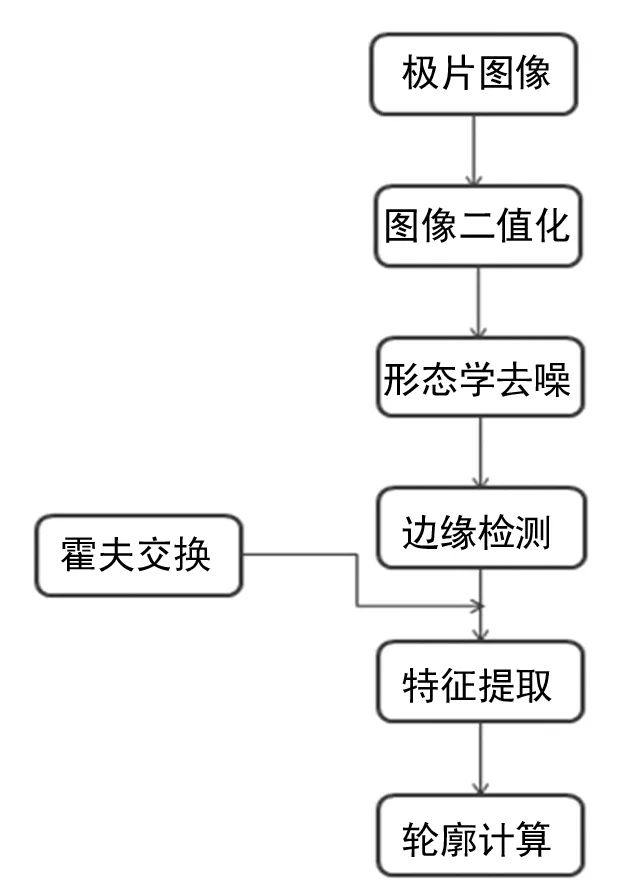
图1 缺陷检测算法流程
2 图像处理
2.1 图像二值化
将图像进行二值化处理的过程中,阈值T的取值将会在很大程度上影响到二值化的结果。二值化函数的作用是将图像中灰度值大于设定阈值T,的像素点的灰度值修改为 255(白色),小于或等于设定阈值的则被修改为 0(黑色)[2]。基于这样的阈值设定,此文将锂电池极片图像的表面缺陷部分置为黑,正常部分置为白。
二值化函数如下式所示:

(1)
式中:阈值T是利用像素直方图来确定,如图2。
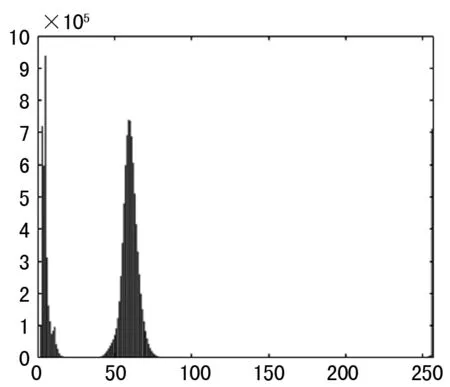
图2 像素直方图
根据像素直方图,取T为100。考虑到后续图像处理过程的需要,此文对极片图像进行了两次二值化的处理。第1次二值化是为了将白背景拉成黑背景,是将目标与背景分割开来;第2次二值化,是在第1次二值化的基础上,提高图像的亮度和对比度, 再对图像进行1次二值化处理,阈值变为两种颜色。经阈值处理后的图像如图3、4所示。

图3 第1次二值化后的图像
2.2 图像去噪
图像在成像、传输或者变换的过程中都会有噪声,会妨碍图像信息的接收。去除噪声的方法有很多种,传统的图像去噪的方式,在去除噪声的同时还会造成图像边缘模糊,不能很好的保护轮廓信息[3]。并且检测到的某些缺陷不是连通的,因此还需对缺陷内部进行填充。而采用形态学方法不仅可以去噪,还可以对轮廓内部进行填充使其成为连通的区域,从而方便后面计算缺陷的长度和面积。因此,本文中选择形态学滤波器去除噪声。其工作原理描述如下:
当二维离散空间中存在f(x)和g(x)两个函数,f(x)对g(x)的腐蚀定义为:

(2)
f(x)对g(x)的膨胀定义为:

(3)
f(x)对g(x)的开运算定义为:
(f°g)(x)=[(fΘg)⊕g](x)
(4)
f(x)对g(x)的闭运算定义为:
(f·g)(x)=[(f⊕g)Θg](x)
(5)
文中,使用的是数学形态学中更加高级的形态学变换——开运算来消除噪声。由式(4)可知,开运算本质上就是先腐蚀后膨胀的过程。
经过形态学滤波处理后的图像如图5所示。
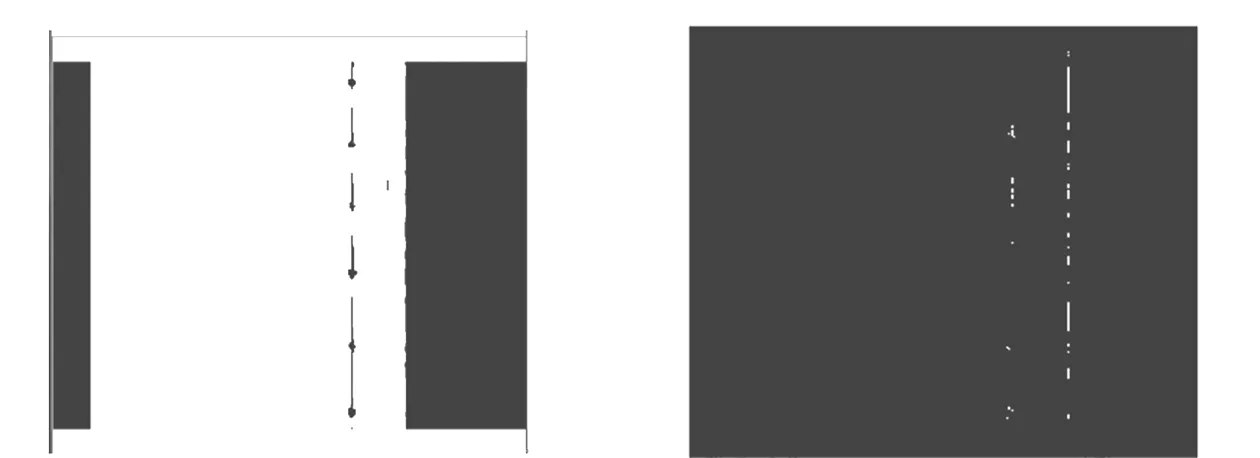
图5 形态学处理后的图像
2.3 边缘检测
边缘检测是属于图像处理和计算机视觉中的基本问题,是缺陷检测的基础和前提,边缘检测的精准直接决定了图像缺陷检测结果的准确性。
边缘检测算法主要是基于图像强度的一阶或二阶导数。此文中采用的Canny边缘算子是一种多级检测算法。评估Canny边缘检测效果的准则有三个:信噪比住在、定位精度准则及单边缘响应准则[4]。Canny边缘检测算法以一阶导数为基础来判断边缘点,是一阶传统微分中检测阶跃型边缘效果最好的算法之一[5]。Canny边缘检测后的图像如图6所示。
由于噪声不能被完全消除,图像中仍会存在噪声。这样可能会导致检测到的缺陷的边界变宽,一些缺陷之间的连接断裂。针对检测出来的缺陷边缘有断裂的可能,文中在图6的基础上,遍历全图计算出轮廓的各点,然后再在连起来绘制边缘轮廓。至此,锂电池极片的缺陷部分基本上和背景分离开了。
3 特征提取与识别
3.1 霍夫变换
1972年Duda和Hart提出利用Hough变换提取直线[6]。霍夫变换在检测直线的过程中,受图像噪声的影响相对较小且鲁棒性佳,应用较为广泛。
霍夫变换的工作原理是利用两坐标空间可以存在映射的关系,将一个空间中存在一定一定形状的曲线映射到另一个坐标空间中的某一点上,然后统计各点出现的概率,寻找出现概率最高的一点,该点对应的就是检测出的直线映射。如图7所示。
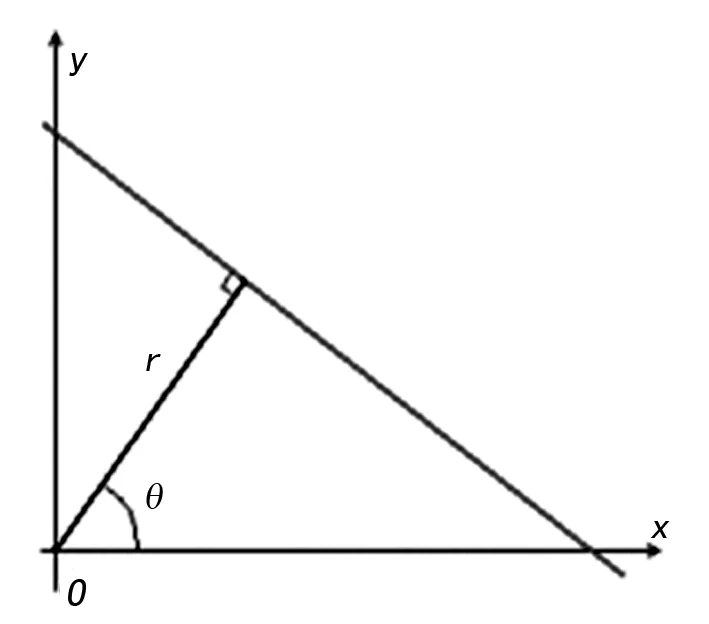
图7 直线表示
图中对于平面中的一条直线,在笛卡尔坐标系中,常用的表示方式是点斜式,即:
y=kx+b
(6)
式中:k为斜率;b为截距。
但对于垂直于x轴的直线的斜率是接近于无穷大的,无法表示,因此将式(1)转换为:
r=xcosθ+ysinθ
(7)
式中:r为直线到原点的距离;θ为直线的垂线与x轴的夹角。该式可用于描述直线直线识别的标准霍夫变换。
霍夫变换有三种:标准霍夫变换(SHT)、多尺度霍夫变换(MSHT)以及累计概率霍夫变换(PPHT)。由于PPHT的执行效率相对要更高一些,所以在本文中采用的是累计概率霍夫变换,可以更好的检测到缺陷轮廓曲线。
3.2 查找并绘制轮廓
确定二值图像边界的围绕关系,及确定外边界、孔边界以及它们的层次关系,由于这些边界和源图像的区域具有一一对应的关系(外边界对应像素为1 的连通区域,孔边界对应的是像素为0 的区域),因此就可以用边界来表示原图像[7]。图像中某一点的像素值可以用二维函数f(i,j)来表示,对像素值进行扫描时,遇到以下两种情况,就会终止算法,因此就可以确定所求边界。
f(i,j-1)=0,f(i,j)=1
(8)
式中:f(i,j)是外边界的起始点。
f(i,j)≥1,f(i,j+1)=0
(9)
式(9)中,f(i,j)是孔边界的起始点。最后,根据上述轮廓提取信息,利用曲线拟合,就可以绘制出缺陷的大致轮廓。如图8为绘制结果。

图8 缺陷轮廓绘制结果
利用图像梯度值计算缺陷轮廓的长度和面积。图像梯度值本质上是像素的累积,所以计算出的长度或面积的单位为像素。设X和Y表示缺陷区域和缺陷边缘,C和S分别表示缺陷轮廓的周长和面积[8]。则C和S的表示如下:
(10)
(11)
根据式(10)、(11)求得缺陷相应的长度和面积,具体数值如表1所列。
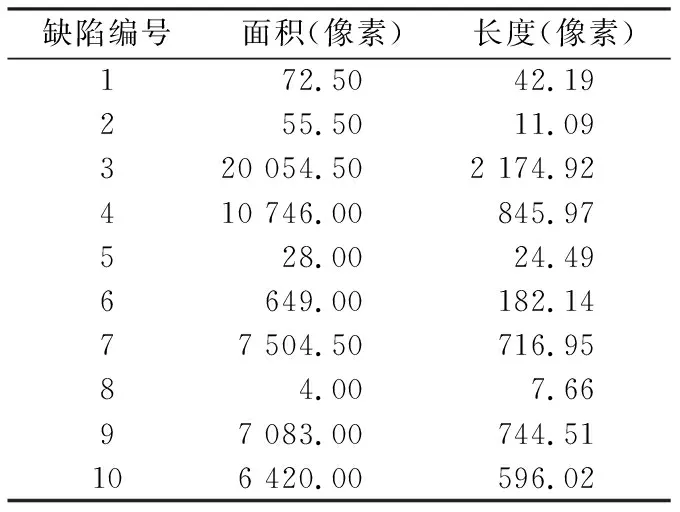
表1 缺陷几何特征
4 结 语
经实验验证,锂电池中存在的缺陷可以用数字图像处理技术较为准确的检测出来。通过对锂电池极片图像进行去燥、边缘检测、霍夫直线检测等手段准确检测出锂电池极片缺陷的轮廓,还可以将缺陷中不连续的点连接起来使之成为一个连通的区域,可以找出缺陷的具体集合特征。实验结果表明,该算法可以快速的检测出缺陷轮廓以及计算出其长度和面积,可以满足锂电池的大批量生产需求。流程更为简洁,为后续的研究奠定了基础。
猜你喜欢
再生资源与循环经济(2022年9期)2022-11-20
中外文摘(2022年8期)2022-05-17
有色冶金设计与研究(2022年1期)2022-03-21
化学工程师(2022年1期)2022-02-23
中老年保健(2021年4期)2021-08-22
电子制作(2018年23期)2018-12-26
中国铸造装备与技术(2017年6期)2018-01-22
科技知识动漫(2017年4期)2017-04-15
晚报文萃(2016年7期)2017-01-10
百科探秘·航空航天(2015年3期)2015-12-01