安全钳提拉机构的提拉力解算研究*
2020-11-18 23:19赵海燕
机械研究与应用 2020年5期
赵海燕
(苏州市职业大学,江苏 苏州 21500)
0 引 言
电梯作为特种设备与我们日常生活正日益密切相关,因此对于电梯的安全性能要求也越来越高。安全钳制动系统作为电梯安全的重要子系统,其安全钳制动系统的有效动作是重中之重。在实际工程中,安全钳触发机构误动作、不动作的情况时有发生,原因各有不同,其中安全钳触发机构设计占有很大一部分原因。
笔者以某一企业实际产品为模型,探讨安全钳提拉机构提拉力与提升高度,弹簧产生的拉力因素之间的关系,借助Excel的VBA工具,筛选出不同提高度与不同弹簧拉力之间最佳的配合数据。
1 限速器安全钳工作原理
图1为电梯限速器(传统型)系统原理图[1],图中:Jgov.为限速器轮的转动惯量;Jten.为张紧轮转动惯量;Mrope.为限速器钢丝绳质量;Fgov.为限速器系统惯性力;a.电梯正常起动、制停加速度。限速器安装在井道顶部或机房中,通过钢丝绳与轿厢的安全钳触发机构联接。当电梯速度超过额定速度115%时[2],限速器发出电信号,切断电梯安全回路,曳引机断电抱闸,致使电梯减速,若电梯速度继续升高,触发限速器机械动作,夹紧钢丝绳。当轿厢下降时,钢丝绳拉动安全钳触发机构运作,使安全钳对电梯导轨产生摩擦力,将轿厢迅速制动在导轨上,电梯轿厢停止运动。电梯的张紧装置(安装于电梯井道底部)提供钢丝绳张力,保证限速器正常运转。

图1 电梯限速器系统原理图
图2为某公司安全钳的提拉机构模型[3],图示为下置式提拉机构,轿托是用来安装轿厢的托架;成型角钢用来连接轿架直梁和安装弹簧;旋转杆与安全钳锲块、限速器钢丝绳、联动杆连接。限速器机械动作时,钢丝绳拉动旋转杆旋转,旋转杆带动安全钳锲块,夹紧电梯导轨。联动杆是为了保证左右两个安全钳动作协调一致,确保轿厢两侧的安全钳同步夹紧电梯导轨。弹簧是为了提供反作用力,电梯正常起停时不致于触发安全钳提拉机构误动作,引发安全事故。
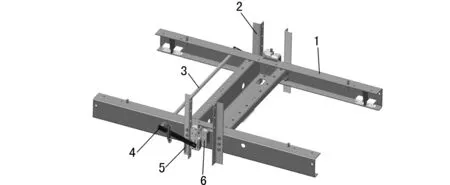
图2 安全钳提拉机构
2 安全钳提拉机构计算
轿厢正常起动制停时,安全钳提拉机构能保证不产生误动作,这个需要安全钳提拉机构提供反制限速器系统的惯性力。如图1(b),Jgov为限速器轮的转动惯量,Jten为张紧轮转动惯量,Mrope为限速器钢丝绳质量,此数据与电梯的提升高度相关,R为限速器轮和张紧装置轮的半径,此两轮半径相等。Fgov为限速器系统惯性力,由此可得下列等式[4]:
(1)
关于电梯正常起动、制停加速度a的取值,大多数电梯公司取0.5~0.6 g,但设计时会留有一定安全余量,一般最大值可为0.8 g,因此计算时可取a为0.8 g。
限速器钢丝绳质量Mrope与电梯的提升高度相关,同时与电梯井道的顶层高度与底坑深度亦有关联:
Mrope=2×(R+K+S+2πR)×ρrope
(2)
式中:R为电梯的提升高度;K为电梯井道的顶层高度S为电梯井道的底坑深度;ρrope为钢丝绳密度。
图3所示为安全钳提拉机构结构图,初始状态时,旋转杆角度α为17.06°,安全钳动作时,旋转杆角度α为5.13°。

图3 提拉机构结构图
单个弹簧在初始状态产生的垂直方向的拉力为Fspring1=41.3 N,安全钳动作时产生的垂直方向拉力为Fspring2=101.4 N(此处因涉及到弹簧安装角度、多个零件尺寸及弹簧刚度等参数,略过计算过程直接引用结果数据)。
单个安全钳锲块的质量Msafety=2.44 kg,提拉机构摩擦力Ffr=40 N,此值在限速器钢线绳连接处测量,方向为垂直方向。此值会因联动杆长短有少许变化,但对整个机构影响较小,可以忽略不计。
根据图4旋转杆所示尺寸,可以得到限速器钢丝绳位置的拉力为:
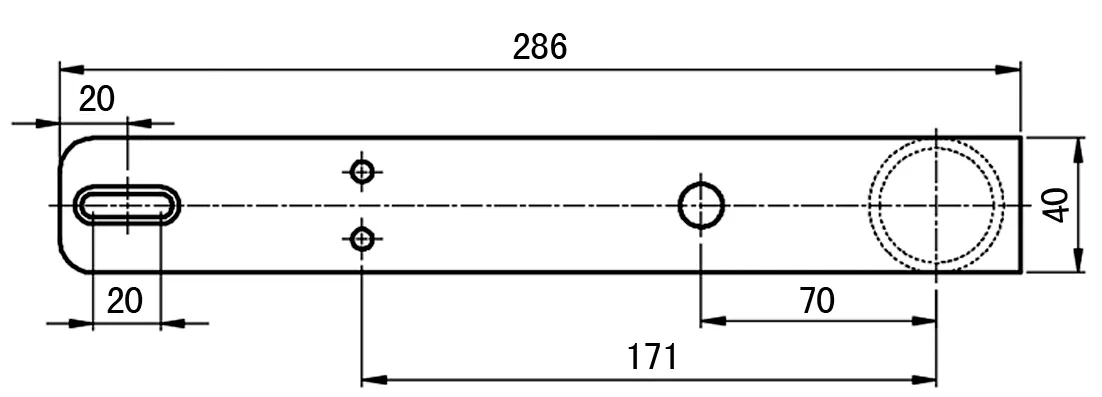
图4 旋转杆尺寸图
Fpull1=(2×Fspring1×171×cosα+2×Msafety×244.3×cosα×a)÷(70×cosα)+Ffr
(3)
式中:Fpull1为限速器钢丝绳拉力;Fspring1为弹簧在初始状态产生的拉力;Msafety为单个安全钳锲块的质量;Ffr为摩擦力;α为旋转杆角度。
此外,安全钳锲块作用在旋转杆上点距旋转杆旋转中心线距离为244.3 mm。
同样,弹簧在安全钳动作时的拉力、安全钳锲块、摩擦力折算到限速器钢丝绳位置的力为:
Fpull2=(2×Fspring2×171×cosα+2×Msafety×241.5×cosα×a)÷(70×cosα)+Ffr
(4)
此时,安全钳锲块作用在旋转杆上点距旋转杆旋转中心线距离为241.5 mm。

图5 旋转杆受力图
查询限速器产品数据,可得其最小提拉力PTF为1 820 N。
3 安全钳提拉机构验证
在国标[5]中规定:限速器动作时,限速器绳的张力不得小于以下两个值的较大值:①安全钳起作用所需力的两倍;②300 N。
因此,安全钳提拉机构合格的条件必须符合两个条件:限速器惯性力Fgov 表1 计算数据 限速器惯性力Fgov因与提升高度R密切相关,在其它参数不变的情况下(其它数据参见表1),R从3 m到140 m,计算不同R所对应的Fgov。由图6可知,随着提升高度R的增加,限速器惯性力Fgov亦增加,提升高度127 m其对应的限速器惯性力Fgov为328.1 N,已大于Fpull1,说明此安全钳提拉机构已不能克服限速器系统的惯性力,存在安全钳误动作的风险,此型安全钳提拉机构最大理论提升高度不能超过127 m。如果再考虑到限速器钢丝绳的弹性等其它因素,此值还得往下调。 图6 提升高度-Fgov 此型安全钳提拉机构弹簧的安装位置是不可调整的,如果改为可调整,只需将图2中成型角钢弹簧安装座由圆孔改为长腰孔即可。同理,我们亦可以验证不同提升高度,不同弹簧调整值是否符合设计要求。此安全钳选用弹簧的刚度是1.76 N/mm,自由长度是106 mm,最大拉伸长度是176 mm。Fspring1的取值范围1.76~105.6 N,由表1可以看出,对应的安全钳动作时弹簧拉力Fspring2的值比弹簧初始拉力Fspring1大60.1N(此处忽略弹簧安装角度影响)。通过Excel VBA[6]分析计算不同提升高度与不同弹簧调整值时的弹簧初始拉力Fpull1和安全钳动作时弹簧拉力Fpull2,同时还得满足限速器惯性力Fgov 图7 为Excel VBA部分程序界面 图8 弹簧拉长与提升高度关系 据图8可知,当提升高度是60 m,弹簧的最小预拉伸范围是1~51 mm。参照弹簧的技术条件:最大拉伸长度是176~106=70 mm,弹簧的最小拉伸长度是10 mm,安全钳锲块的提升行程为50 mm,可以得到弹簧最小预拉伸长度为10~20 mm。这里没有考虑到弹簧刚度误差的影响,业者可根据实际产品精度具体考虑。图6与图8的原始数据因采用Excel VBA计算,数据量太大,不便展示,仅用图表展示部分数据。 安全钳提拉机构作为电梯重要的安全子系统之一,如果设计是有效的,能充分保证限速器安全钳有效运行,为电梯安全运行保驾护航。文中针对安全钳提拉机构理论分析其受力模型,给出计算公式,同时运用Excel VBA方法,获取大量数据进行分析,取得最佳设计组合数据,给业界同仁有很好的指导性。针对部件计算,业者也可以依据力学计算结果进行有限元分析,计算其强度是否足够,以及疲劳强度,借助现有市面上的有限元软件,皆可以顺利实现。



4 结 语
猜你喜欢
航空发动机(2020年3期)2020-07-24中国特种设备安全(2019年8期)2019-10-14中学物理·高中(2019年8期)2019-09-20中国特种设备安全(2019年4期)2019-05-20中国特种设备安全(2019年2期)2019-04-22科技创新与应用(2018年27期)2018-09-29发明与创新·中学生(2018年2期)2018-02-07时代英语·高二(2017年4期)2017-08-11天津体育学院学报(2016年3期)2016-12-18中国质量监管(2016年10期)2016-07-10