
具有积分滑模环节的低压微电网下垂控制策略研究
2020-11-17 07:20:26王茗萱
吉林电力 2020年4期
巫 悦,王茗萱,王 智
(1. 东北电力大学,吉林 吉林 132012;2.国网长春供电公司,长春 130021 )
由分布式电源、负荷、储能、监控保护等装置汇集而成的微电网, 通过柔性控制, 可以大大降低分布式电源受到其他扰动因素的影响。下垂控制策略常用于微电网孤岛运行中[1]。下垂控制属于对等控制,微电网内的微电源地位等同、相互独立,没有从属关系。利用微电源输出电压、频率和功率之间的线性耦合关系,通过调节参数输出理想电压。
目前国内外相继提出了一些针对微网控制的改进策略,文献[2]提出了一种改进的基于分散式虚拟电池的下垂控制,可以动态更改下垂控制环路中的参考输出电压和虚拟电阻。文献[3]中结合微电网分层控制的基本框架,以实现每一层的分布式控制为目标,提出了基于多智能体一致性算法的分布式分层控制策略,以维持微电网系统频率和电压的稳定,以及实现有功、无功负荷在分布式电源间的灵活分配。文献[4]从下垂控制原理出发,对传统下垂控制进行改进,提出带有电压补偿环节的“虚拟电抗法”,以实现在功率按容量分配的同时,电压不出现大幅跌落。文献[5]提出一种基于虚拟阻抗滑模控制的多媒体控制器(MMC)环流抑制策略。通过建模分析和解耦控制,结合普通和通用环流抑制策略,进行不同环流抑制模型下的对比研究。文献[6]通过设计了一种基于矢量控制的积分滑模控制器,解决孤岛微电网中的三相电压稳定问题。
本文对下垂控制及孤岛微电网的拓扑结构进行了数学推导,并根据滑模控制的设计原则设计了具有积分滑模环节的下垂控制器。在Matlab/Simulink中搭建了仿真模型,与传统下垂控制器进行了对比,验证了所设计控制器的有效性。
1 孤岛微电网及控制器模型
1.1 下垂控制原理
以两台逆变器并联为例,其简化原理图见图1。其中电阻Rii,感抗Xii(i=1,2)为逆变器i的等效输出值,Zload为公共负载,Ei∠φi为逆变器i的空载输出电势,φi为逆变器i输出电压与并联交流母线电压的相角差,U∠0°为并联交流母线输出电压。

图1 两台逆变器等效模型
逆变器输出的有功、无功功率Pi、Qi分别为:
UEisinφisinθi]
(1)
UEisinφicosθi]
(2)
式中Zi为逆变器i的阻抗,为逆变器等效输出阻抗和线路阻抗之和;θi为逆变器i的输出阻抗角。
且有:
(3)
θi=arctan(Xli/Rli)
(4)
低压微电网中,φi很小,近似有sinφi=φi,cosθi=1,且当R远大于X时,有:
(5)
由式(1)至式(5)可以看出,输出有功功率Po与电压幅值差呈线性关系,输出无功功率Qo与相角差也是线性关系。电压相角φi与角频率ωi有:ωi=dφi/dt,可以通过无功功率控制角频率进而控制相角差,通过有功功率来控制电压幅值,由此可以得到PV-Qf控制算法:
ω=ωo+kQ(Q-Qo)
(6)
E=Eo-kP(P-Po)
(7)
式中:ωo、Eo分别为PV-Qf控制算法的角频率、电势输出值;kQ、kP分别为PV-Qf控制算法的无功功率角频率控制系数、有功功率电势控制系数。
传统的下垂控制手段通过P、Q得到逆变器输出电压的相角与幅值,通过逆变器的输出电压Ut与脉冲宽带调制(PWM)波关系Ut=(Udc/2)m得到调制波m,调制波m经过PWM环节得到脉冲,将脉冲输入给逆变器,最终直流电源电压Udc经过逆变得到的输出电压Ut。
1.2 积分滑模原理
滑模控制作为非线性变结构控制的一种,能够使得系统参数按照固定的滑模面趋近于参考值,并且能大幅度提升系统鲁棒性。但由于滑模控制存在抖振问题,因此将滑模面设计为积分滑模的形式,能够大幅度降低参数的抖振现象。通过在下垂控制当中引入积分滑模的环节,设计适当的参考电压,使得
逆变器输出电压能够快速跟踪参考电压,并削弱了抖振。
1.3 系统结构

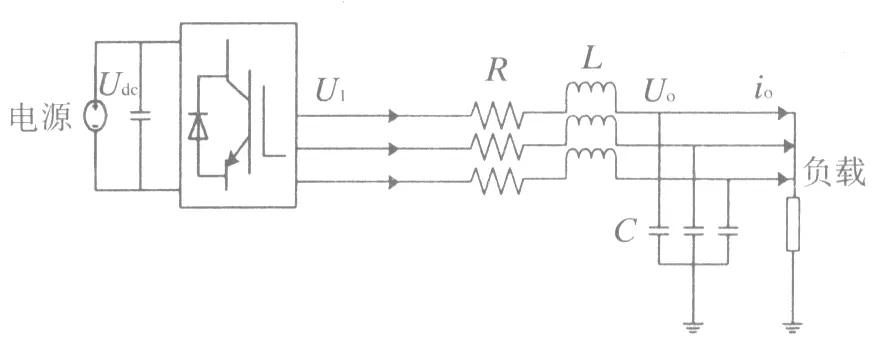
图2 孤岛微电网系统结构
1.4 数学模型
微电网状态方程表达式如下:
(8)
(9)
将上述等式写为d-q轴的表达式,并进行解耦:
(10)
(11)

图3 控制系统结构

(12)
(13)
式中i0d、i0q分别为d-q坐标系下输出电流。

(14)
(15)
定义d-q坐标系下电流误差:
(16)
(17)
a1、a2,b1、b2为控制器参数,定义积分滑模面函数:
(18)
确定d-q坐标系下积分滑模控制率:
(19)
(20)
其中K和ε分别为在控制率表达式中积分滑模面函数以及其符号函数的系数,一般取固定常数。
因此联立上述方程,解得滑模控制输出调制波md、mq分别为:
(21)
(22)
2 仿真分析
使用Matlab/Simulink软件进行了仿真以验证所提出控制策略的有效性。构建了微电网的等效模型,分别采用本文提出的控制策略以及传统下垂控制策略进行分析比较。选择a1=a2=1,b1=b2=1 000,K=1.5×107,ε=5×105,kP=4×10-6,kQ=4×10-4,参考电压设定为350 V。
全仿真时长为0.5 s,仿真中设置的系统元件参数:Udc=800 V,C=1 500μF,R=8 mΩ,L=350 μH。
图4和图5分别给出了系统在0

图4 传统下垂控制系统输出的三相电压
本文设计的控制方法理论上输出的谐波失真远小于这个值,因此采用积分滑模的控制器具有优于传统下垂控制的控制效果,更适用于工程实践。

图5 含积分滑模环节的下垂控制系统输出的三相电压
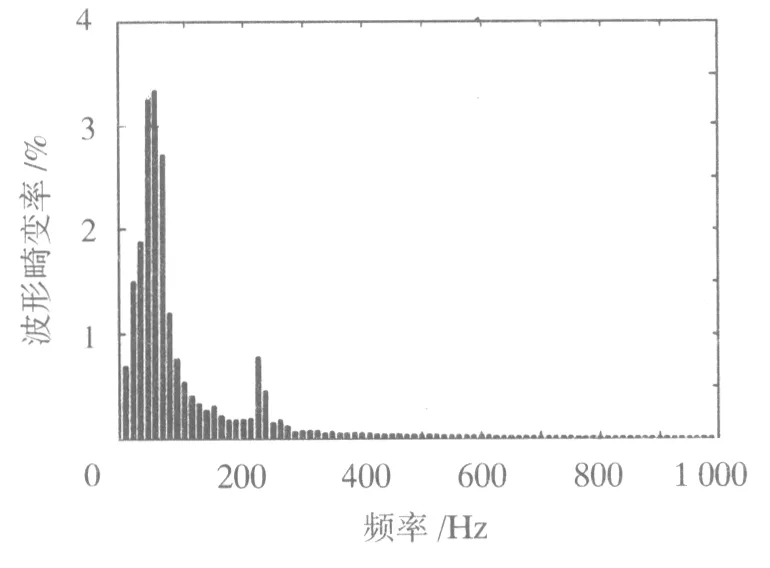
图6 传统下垂控制系统输出电压FFT分析

图7 含积分滑模环节的下垂控制系统输出电压FFT分析
3 结论
本文针对下垂控制电压跟踪性能展开研究,两台逆变器并联的等效模型,推导了下垂控制的基本数学模型,通过研究微电网拓扑结构,利用积分滑模的方法设计了控制器, 最后在Matlab/Simulink软件中搭建了仿真模型,并使所设计的积分滑模下垂控制策略与传统的下垂控制策略进行了对比,证明了含积分滑模环节的下垂控制策略具有更强的电压跟踪性能,验证了本文改进的控制策略的有效性。
猜你喜欢
电工技术学报(2021年9期)2021-05-12 06:33:40
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
消费导刊(2018年10期)2018-08-20 02:57:02
电子制作(2018年1期)2018-04-04 01:48:40
西安工程大学学报(2016年2期)2016-06-05 12:25:17
通信电源技术(2016年1期)2016-04-16 04:57:26
