爬杆辅助平台可行性研究报告
2020-11-16 13:38张凯
电力与能源系统学报·下旬刊 2020年4期
张凯
摘要:随着社会的发展,高空作业在人们的生活中出现得越来越普遍。高空作业具有较高的复杂性和危险性,工作人员往往需要架设吊绳或者使用工程车到达预定高度的位置,前期准备工作繁琐,作业环境存在高危险性和高不确定性,且作业过程成本高昂,作业效率低下。而本文设计了一种爬杆辅助平台,降低了高空作业复杂性与作业成本,提高了作业效率,同时也大大减少高空作业对人带来的潜在伤害。
关键词:高空作业;爬杆辅助;平台设计
一、设计背景及意义
由于周围环境的限制,在大型带电作业车不能到达的检修位置,往往一次检修都要浪费大量的时间、人力、财力等,工作效率较低。
(2)
如遇高空作业车及作业平台无法抵达设备指定位置,往往需要检修人员攀爬。
(3)
国网检修工人在进行爬杆作业时,传统的都是利用穿戴脚扣进行爬杆,到合适位置时,检修工人双脚只能维持上下错位的状态。这样的状态不利于高空作业,且检修人员工作效率会无法达到昀佳值。为了解决上述问题特提出爬杆辅助平台的设想。
(4)
目前市场上作业时只能一人在高空作業或者一上一下,不能同时容纳两个人在同一高度进行作业。
针对上述现状,研发一款便携式辅助平台设备来解决此现状,填补行业中的空白,节省检修时间、人力成本、提高工作效率。检修人员在高空作业检修时,可以卸掉脚扣,双脚踏在辅助平台上。由于力的作用是相互的,平台受力面积大于脚扣受力面积,平台对双脚的挤压是微乎其微的,所以作业人员是完全不会有任何不舒适感的。
平台结构是圆形机构,检修人员可以绕着水泥杆 360度范围内活动。脚扣结构只适应爬杆需求,检修人员只能在局部范围内活动。
二、国内外研究现状
1、滚轮式
该样式辅助平台以多个滚轮环抱杆件增加接触面积并运用自锁的原理设计,借助爬杆的自重与负载,使一侧的滚轮斜向下紧扣在电线杆上,另一侧滚轮斜向上紧扣在电线杆上,以此来产生较大的摩擦力,借助这个摩擦力,电机带动滚轮转动驱动整个辅助平台的移动。采用舵机为驱动滚轮,依靠滚轮与杆件之间的摩擦力完成移动。该爬杆辅助平台有较大的负载能力,动作平稳且冲击较小。但是越障能力较差,且整机体积较大,结构相对复杂。
2、仿生式
仿生式爬杆辅助平台,顾名思义就是通过模仿生物爬杆时的步态和贴附方式,进而设计出的。该辅助平台可以分为头部,中部,尾部。头部尾部分别设计有夹紧部件,中部设计有伸缩部件。爬行杆件时,尾部通过夹紧部件夹紧杆件,头部夹紧部件松开,中部伸缩部件伸长,之后头部夹紧,尾部松开,中部缩短。以此完成一个周期动作。该类型的辅助平台有良好的对心能力,利用气缸完成机器人的夹紧与移动有一定的负载能力与快速的响应速度。同时负载能力较好,结构简单,具备一定的越障能力,对控制的要求也相对简单
3、仿尺蠖式
仿生类爬杆辅助平台学习了生物结构或者运动特性上的优势,使得结构紧凑,或者对环境的适应性与机动性能良好。该类爬杆辅助平台对高性能的新型材料有一定的要求,需要精密灵敏的传感器为爬杆机器人感知外界环境,对控制方式,驱动方式更是发起高要求的挑战。也因为复杂的仿生类爬杆机器人在开发和制造上的困难,导致其还局限于实验验证,难以应用到工业方向。
三、项目的理论和实践依据
爬杆辅助平台的设计理念来源于抱箍,一种嵌入式抱箍,它是由左、右两半片抱箍对合后联接而成,左、右两半片抱箍均呈半圆环状,半圆环两端向外弯折,各形成一个安装耳,其特征在于:所述的左半片抱箍一端的安装耳上开有嵌槽,相应的,与其相配合的右半片抱箍相应端的安装耳上设置有销轴,右半片抱箍一端安装耳上的销轴嵌入左半片抱箍一端安装耳上的嵌槽。抱箍结构的基础上进行改装加装锁紧螺杆防滑出机构,抱箍左右半片内圆面都安装有防滑橡胶条增加摩擦力。平台上平面是具有一定斜度的平面,设计成这样的结构是因为作业人员在检修维护设备时在安全带作用下身体是不可能与电杆面相平行的,会形成一定的角度。
四、项目研究内容和实施方案
4.1 研究内容
目前针对输电配电变电线路上的设备维修依靠单纯的人力攀爬或者是高空作业车进行登高检修,特别是变电现场设备非常密集,受变电站检修通道、停电范围、安全距离的限制,高空作业车或检修升降平台有时不能到达检修位置。变电站内户外设备居多,设备长时间暴露在空气中,易受环境、负荷影响,设备容易被氧化及外部环境污秽物污染,导致设备需要进行定期维护。在狭窄的空间高空车无法驶入的情况下只能依靠人力攀爬登高维护清洗设备。目前传统的登高是依靠穿戴脚扣的形式,到达指定检修位置时,检修工人双脚只能维持上下错位的状态,这样的状态不利于高空作业。双脚踏在同一平面上是昀舒适的一种状态。只有姿势正确了,检修人员工作效率才会提升。在同一高度检修时,目前电力行业中不依靠高空登高车的情况下只能允许一个人进行作业,需要另一人员进行协助时,只能是一人在下部进行协助,而不能同时处在同一水平面上。另外传统的这种形式检修人员只能在某个区域内进行维护,不能围绕电杆进行360度范围内活动检修。
4.2 实施方案
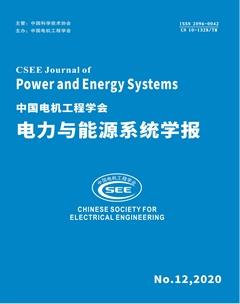
一种爬杆辅助平台,其特征在于,包括:左右两半平台、锁紧装置、内圈防滑橡胶、螺杆防滑机构、锁紧装置承载块、螺杆防滑机构承载块、平台面防滑槽、平台底部网状槽、开合机构、吊装孔。
一种爬杆辅助平台,其特征在于,左右两半片平台使用螺栓固定与开合机构组合在一起。
一种爬杆辅助平台,其特征在于,锁紧装置采用手轮与螺杆配合的方式,锁紧设备时只需顺时针旋转手轮,松开设备时只需逆时针旋转手轮。
一种爬杆辅助平台,其特征在于,内圈防滑橡胶是贴于左右两平台与水泥杆接触的内圈槽中,橡胶的作用是为了增加摩擦力。
一种爬杆辅助平台,其特征在于,螺杆防滑机构的组成是由拉环、销轴、弹簧、弹簧座组成,需要分离两平台时,第一步逆时针旋转手轮,第二步勾住拉环使销轴从孔中脱离,第三步螺杆逆时针旋转脱离螺杆防滑机构承载块的槽口,该设备就可以打开。
一种爬杆辅助平台,其特征在于,锁紧装置承载块与螺杆防滑机构承载块均用螺栓紧固分别安装在左右两平台上。
一种爬杆辅助平台,其特征在于,平台面防滑槽是利用机铣的方式在平面上开槽,开槽目的是为了防止检修人员脚底打滑。
一种爬杆辅助平台,其特征在于,平台底部网状槽是利用机铣的方式加工而成的,可以减轻设备的重量,防止设备受环境因素出现裂纹。
一种爬杆辅助平台,其特征在于,左右平台各加工一个直径为 30mm的吊装孔,检修人员爬杆时不需要随身携带,到达指定位置利用绳索把设备吊装到使用位置就行。
五、结语
本设计解决了检修工人徒手攀爬电线杆的难题,保障了工人的人身安全,提高了工作效率,加快了工作流程,提高了工人工作时的舒适度,在后续的工作中也可以对一些部件进行调整,提高高空作业的安全性。
参考文献
[1]高层建筑外墙清洁涂装壁面爬行机器人研究[D].干朝阳.哈尔滨工程大学 2007
[2]现代机械创新产品分析与设计[M].机械工业出版社,赵松年等主编,2000
[3]一种载人爬杆作业平台[P]. 高山,单晓锋,王琦,唐旭明,吴少雷,韩先国,史梦迪,冯玉,刘阳,郭祥,甄武东,王万成,张明帅,侯强强. 中国专利:CN210478872U,2020-05-08
猜你喜欢
信息化建设(2021年1期)2021-05-20
学苑创造·C版(2020年12期)2020-01-04
工业设计(2019年4期)2019-06-11
科学与财富(2016年34期)2017-03-23
大经贸(2016年11期)2017-01-06
软件导刊(2016年9期)2016-11-07
中国教育信息化·基础教育(2016年9期)2016-10-18
股市动态分析(2016年30期)2016-08-15
环球时报(2009-11-23)2009-11-23