
小型观测级ROV四自由度运动控制系统研究
2020-11-14 07:13盛智彬王海文
舰船科学技术 2020年10期
杨 淼,盛智彬,王海文,殷 歌
(1.江苏海洋大学电子工程学院,江苏连云港222002;2.江苏海洋大学机械与海洋工程学院,江苏连云港222002;3.江苏科技大学海洋装备研究院,江苏镇江212000)
0 引言
水下机器人(Underwater Vehicle)主要分为有缆水下机器人(Remotely Operated Vehicle,ROV)和自治水下机器人(Autonomous Underwater Vehicle,AUV)。作为一种探索海洋的智能工具,水下机器人在水产养殖、水下石油勘探、大巴检测以及军事等领域扮演着重要的角色[1–2]。但由于外部水流的干扰,以及自身各刚体间的耦合,水下机器人难以稳定地在水下进行运动,因此,对于水下机器人控制系统的研究至关重要[3–5]。
为有效控制水下机器人的运动,目前许多控制方法被使用,如自适应控制[6–8]、滑模控制[9–11]、模糊控制[12–13]、欠驱动控制[14]等。其中,欠驱动控制可以有效地控制水下机器人的运动,同时减少推进器的数量,降低能耗,但这种控制方法极为复杂,一般都是通过消除非线性项来解决,这会严重降低系统的鲁棒性[15]。
作为一种非线性控制方法,滑模控制具有结构简单、响应快速、鲁棒性强以及对外界干扰不灵敏等特点[16],备受广大研究人员青睐。但经典滑模控制方法存在严重抖动问题,对于水下机器人而言,这会导致推进器能量消耗过大,甚至损坏推进器[17]。因此,如何解决抖动问题成为近几年滑模控制研究的焦点。
经典滑模控制中的抖动,主要是由于控制规律中不连续的切换控制项引起的。针对这一问题,Soylu等[18]提出一种无抖动滑模控制方法,其方法主要是设计自适应控制项代替不连续的切换控制项,自适应控制项可以持续补偿系统模型不确定影响,从而消除抖动。但这种方法较为复杂,控制参数设置较多,在实际中难以实现;Liu等[19]提出了一种全局滑模控制方法,采用饱和函数替代了常用的符号函数。这种方法简单有效,但设计时并未考虑水下机器人模型不确定因素的影响;Huang等[20]采用了双闭环滑模控制方法,用以提高ROV运动时地抗干扰能力,在减小滑模控制抖动问题方面,则是通过设计一种连续的函数作为切换控制项。但此方法同样未考虑ROV模型不确定因素的影响。
为了解决经典滑模控制中的抖动问题以及ROV运动时地模型参数不确定性问题,本文针对一类小型观测级ROV的四自由度运动,提出一种基于径向基函数神经网络(Radial Basis Function Neural Network,RBFNN)自适应滑模控制方法。针对ROV运动时模型不确定因素的干扰问题,采用RBF神经网络算法,实现对ROV模型的补偿;用反正切函数替换符号函数,减小了经典滑模控制的抖动。
1 ROV模型数学描述
1.1 ROV运动学模型
本文针对一类小型观测级ROV进行设计,这类ROV一般配备4个推进器,主要实现前后、平移、深沉和转首四自由度的运动,如图1所示。
在ROV中,通常采用惯性坐标系(Inertial frame)和体坐标系(body-fixed frame)来描述ROV的运动。相对于体坐标系的速度向量可以表示为νT=[ν1ν2],其中,ν1T=[uvw]代表ROV的线速度向量,u,v,w分别为前进、平移、深沉3个方向的速度;v2T=[pqr]为ROV角速度向量,p,q,r分别代表横倾、俯仰、转首3个方向的速度。相对惯性坐标系的位姿向量表示为ηT=[η1η2],其中,η1T=[xyz]表示ROV在惯性坐标系中的运动位置向量,x,y,z分别为前进、平移、深沉3个方向的位置;η2T=[φθψ]表示ROV在惯性坐标系中的运动姿态向量,φ,θ,ψ分别代表横倾、俯仰、转首3个方向的姿态。速度向量与位姿向量的转换可以写为如下形式:

图1 小型观测级ROV模型Fig.1 The model of small monitoring ROV

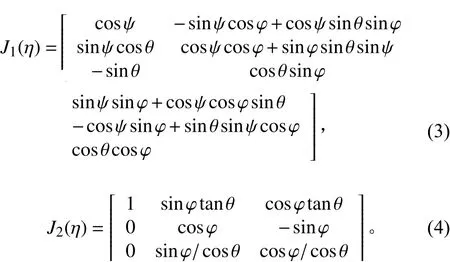
其中,J(η)为雅可比矩阵,定义为:

式中,J1(η)和J2(η)分别定义为:
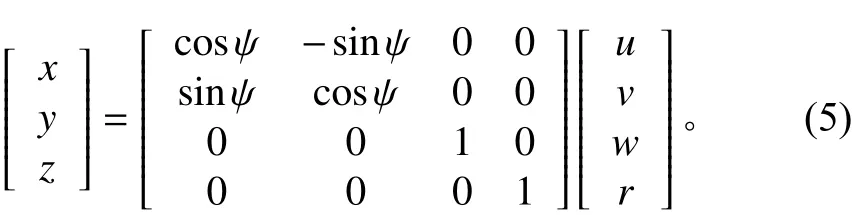
因为本文只讨论ROV前后、平移、深沉和转首4个自由度的运动,所以横倾角φ和俯仰角θ的变化都为0。因此,式(1)可以写为:
1.2 ROV动力学模型
针对四自由度的ROV,其动力学模型表示为[21]:

式中,M∈R4×4为惯性矩阵,定义为:

其中:m为ROV质量;Iz为ROV关于Z轴的转动惯量;分别为ROV的附加质量和附加惯量。
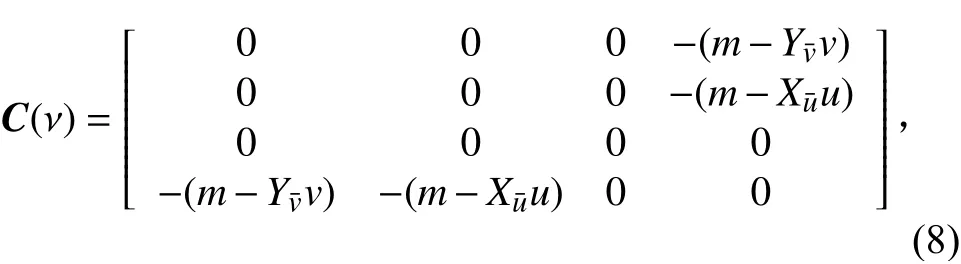
C(v)∈R4×4为科氏力和向心力矩阵,定义为:
D(v)∈R4×4为阻尼系数矩阵,定义为:

其 中:Xu,Yv,Zw,Nr,Xu|u|,Yv|v|,Zw|w|,Nr|r|代 表粘滞水动力参数。
g(η)∈R4为ROV恢复力和力矩向量,定义为:

其中:W,WB分别为ROV的重心和浮心。
τ∈R4和τd∈R4分别为ROV的控制输入以及外部干扰。
根据式(1)和式(6),ROV的动力学模型可以改写为:

为了便于后面部分ROV的稳定性分析,假设ROV的动力学模型具有如下性质:
性质1惯性矩阵Mη(η)为正定对角矩阵,即
性质2矩阵为斜对角矩阵,即对于任意向量ς ,都有
2 控制器设计
2.1 经典滑模控制器设计
在经典滑模控制器设计中,首先设计一个滑模函数S,然后再设计一个控制规律τ。当系统的状态轨迹在外部干扰下偏离滑模面时,控制规律会迫使系统的状态轨迹重新沿着滑模面向平衡点运动。
针对四自由度ROV系统,定义ROV的期望位姿为ηd,实际位姿为η,位姿误差为则滑模函数定义为[17]:

其中,S∈R4,Λ=diag{k1,k2,k3,k4},ki>0且ki为常数,i=1,···,4。

一般情况下,滑模控制规律设计为:其中,τeq为等效控制项,τsw为切换控制项。等效控制项用于补偿系统模型。切换控制项则是为了提高系统的抗干扰能力,一般设计为τsw=−Ksgn(S),其中K为常数且K>0,sgn(·)代表符号函数。
对滑模函数求1阶导数:

结合等式(11)、等式(12)和等式(14)可得:

如果ROV系统动力学模型中各参数都是不变的,则式(15)中控制规律τT可设计为:τT=Mη(¨ηd+Λ˙˜η)+Cη(˙ηd+Λ˜η)+Dη(˙ηd+Λ˜η)+
gη+KdS−Ksgn(S)。(16)其中,Kd为常数。
然而在实际应用中,由于ROV自身的非线性特性以及环境的影响,ROV系统动力学模型中的各参数是变化的,因此经典滑模控制方法并不能有效实现ROV的运动控制。
2.2 RBF神经网络自适应滑模控制器设计
为解决ROV模型参数不确定性问题,目前神经网络算法被广泛使用。然而,传统的神经网络算法收敛速度慢,并不适用于实时的在线计算,如BP(Back Propagation)神经网络算法。RBF神经网络作为一种前馈式网络,具有结构简单,训练速度快等优点。因此,本文将采用RBF神经网络算法解决ROV模型不确定性问题。RBF神经网络算法逼近公式为:

其中:b∈Rj是输入向量;W*∈Rj是网络的最优权值向量;μ(b)代表径向基函数,μ(b)=[μ1(x)μ2(x)···μj(x)]T;ε为逼近误差。RBF神经网络的网络结构如图 2所示。

图2 RBF神经网络结构图Fig.2 The structure diagram of RBFneural network
根据式(15),定义ROV模型不确定项为:


其中,Cj和Bj分别为高斯函数的中心和宽度。
定义RBF神经网络对ROV模型不确定项逼近函数为:



在本文中,将RBF神经网络部分作为等效控制项。此外,用反正切函数arctan(·)替换切换控制项中的符号函数sgn(·),则ROV的控制规律设计为:RBF神经网络自适应滑模控制的框图如图3所示。考虑引入控制规律τT,从而使得ROV系统的位姿误差和RBF神经网络的权值误差镇定,构造Lyapunov函数如下:

对Lyapunov函数求导,并将式(15)代入得:

将控制规律式(22)代入,则式(24)可写为:

图3 RBF神经网络自适应滑模控制框图Fig.3 Block diagram of RBFneural network based adaptivesliding mode control

将自适应规律式(21)代入,并根据性质2,等式可以简化为:

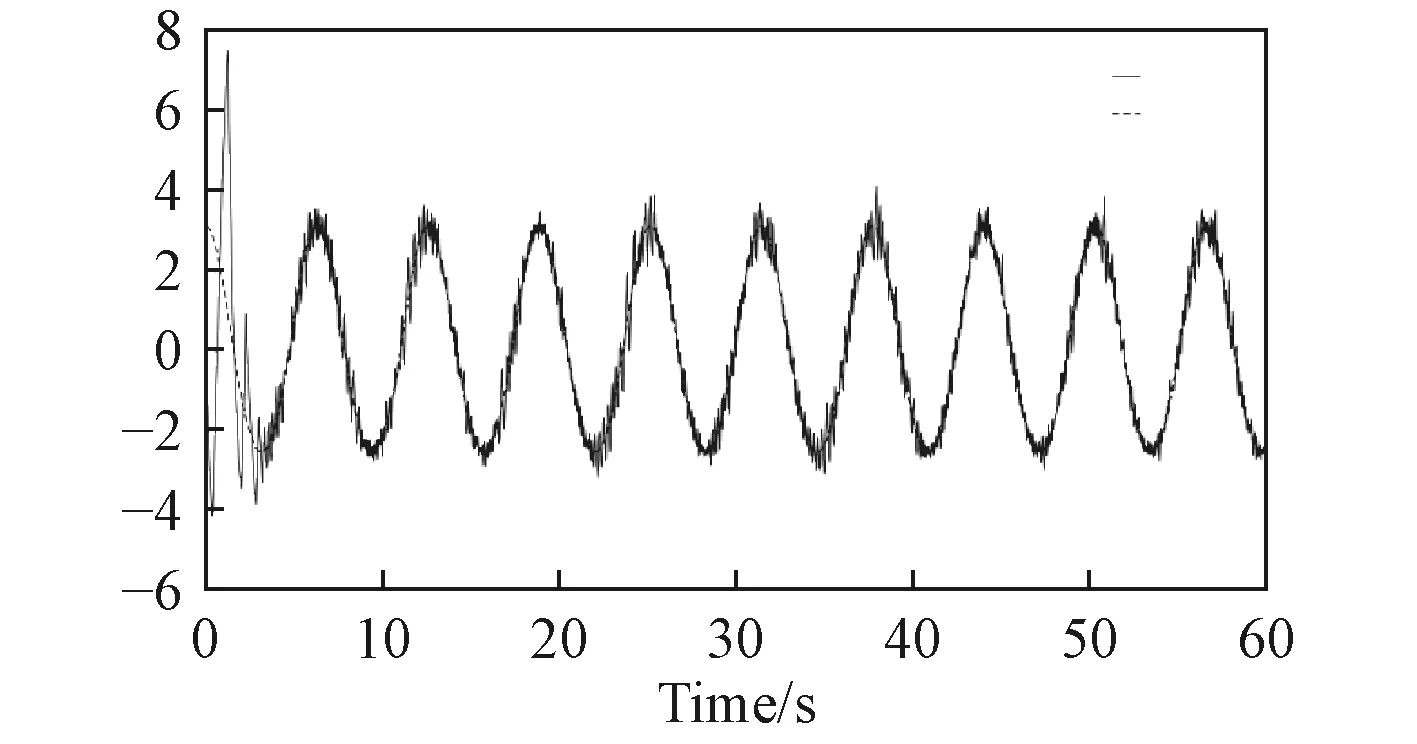
其中,外界干扰∥ε−d∥ 为验证本文提出的RBF神经网络自适应滑模控制器能有效控制四自由度ROV的运动,采用Matlab/Simulink软件进行仿真实验,比较RBF神经网络自适应滑模控制器与切换控制项分别为符号函数sgn(·)、饱和函数sat(·)的滑模控制器的性能。ROV的水动力参数如表1所示。 实验中,设定仿真时间t=60 s,选择cos(·)余弦函数作为外部干扰,ROV的初始位姿与期望位姿如表2所示。 仿真结果如图4~图8所示。其中,图4为RBF神经网络对ROV模型不确定项的逼近,图中虚线代表目标函数,实线代表逼近函数。可以看出,RBF神经网络可以有效地逼近ROV模型的不确定项,逼近误差大约在0.312~0.667,如表3所示。 为了便于比较分析,图5~图8使用3条曲线代表各控制方法的仿真结果。其中,曲线1代表本文提出的控制方法,曲线2和曲线3分别代表切换控制项为sgn(·)和sat(·)的滑模控制。 表1 ROV水动力参数表Tab.1 Hydrodynamic parameters of the ROV 表2 ROV初始位姿与期望位姿Tab.2 Initial position and desired position of the ROV 图4 RBF神经网络逼近ROV模型不确定项Fig.4 The RBFneural network approximates the ROV model uncertainties 图5 ROV三维轨迹跟踪Fig.5 Position tracking results of ROV in xyz plot 图6 ROV位姿相轨迹图Fig.6 Phaseportrait of ROV position and attitude 图5 为ROV在3种控制方法下的三维运动轨迹。可以看出,在3种控制方法下,ROV都可以运动到期望位姿,但采用RBF神经网络自适应滑模控制的ROV运动效果更好,抗干扰能力更强。ROV的相轨迹图如图6所示。可以看出,ROV在采用切换控制项为sgn(·)的滑模控制方法时,相轨迹图存在着明显的抖动,在采用切换控制项为sat(·)的滑模控制方法时,在x,y,z轴方向上的相轨迹图都较为平滑,并最终都趋近于稳定点,但在对转首角的控制上,却出现了极限环,这是不允许的,如图6(d)所示。在采用RBF神经网络自适应滑模控制方法时,ROV的相轨迹都较为平滑,并且最终都趋近于稳定点。图7为ROV四自由度的轨迹跟踪图。由图7(a)~图7(c)可以看出,3种控制方法均可快速的跟踪到目标轨迹,但在x轴和y轴方向上,RBF神经网络自适应滑模控制方法的超调量小于其他2种控制方法。在转首角姿态上,RBF神经网络自适应滑模控制方法几乎0误差跟踪ROV的运动轨迹,而其他2种方法都存在着误差,如图7(d)所示。ROV的轨迹跟踪误差如图8所示。从图8(d)可以看到,在转首姿态上,切换控制项为sgn(·)的滑模控制方法的跟踪误差在0.03左右,切换控制项为sat(·)的滑模控制方法的跟踪误差在0.07左右。因此,综合上述实验结果,可以证明本文提出的RBF神经网络自适应控制方法具有很好的综合性能,有效地减小了经典滑模控制的抖动问题以及解决了ROV模型不确定性问题,能够实现控制ROV在外部干扰下稳定地运动。 图7 ROV位姿运动轨迹跟踪Fig.7 ROV position and attitude tracking results 图8 ROV位姿轨迹跟踪误差Fig.8 Tracking errors of ROV position and attitude 表3 RBF神经网络逼近误差Tab.3 Theapproximation errors of RBFneural network 本文针对四自由度ROV,提出一种基于RBF神经网络的自适应滑模控制方法,主要解决了经典滑模控制中存在的抖动问题,以及ROV模型不确定性问题。首先考虑了ROV在运动时,受自身模型不确定因素的干扰,引入R B F神经网络算法,用以持续补偿ROV模型不确定项。RBF神经网络中的权值则是通过自适应控制方法给出。其次,为了解决经典滑模控制中存在的抖动问题,采用反正切函数作为切换控制项,这种方法简单有效,可以最大化减小滑模控制的抖动,使系统的状态轨迹平滑地沿着滑模面运动到平衡点。最后,根据Lyapunov稳定性定理验证了被控系统是全局渐进稳定的。通过仿真实验,将本文提出的控制方法与2种经典滑模控制方法进行了比较,仿真结果证明该控制方法具有更好的控制效果。3 仿真分析





4 结语


猜你喜欢
西安交通大学学报(2022年7期)2022-07-19
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
水下无人系统学报(2021年1期)2021-03-10
中国科技纵横(2020年13期)2020-12-11
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代信息科技(2020年22期)2020-06-24
山东工业技术(2019年16期)2019-07-19
