基于人工智能的高速公路车辆安全驾驶预警系统识别方法与系统设计
2020-11-13 09:02:38王乐宁
山西交通科技 2020年5期
王乐宁
(青岛理工大学 机械与汽车工程学院,山东 青岛 266520)
1 研究背景
交通运输部2019年交通运输行业发展统计公报显示,目前我国高速公路里程已达到14.96万km,居世界第一。随着越来越多的人选择高速公路出行,我国高速公路的事故率与死亡率居高不下。针对国内外高速公路事故原因分析[1]得知,造成交通事故的人为因素中驾驶员操作不当的案例尤为常见。其中更深层次的原因主要有两点。第一,驾驶员本身驾驶技术不高,规则意识淡薄,对于车辆在高速行驶情况下的应急处理能力低,容易造成因随意变道、激烈驾驶等而引发的交通事故。第二,车辆驾驶员特别是大型车辆驾驶员,工作压力大,休息时间短,容易造成因疲劳驾驶而引发的交通事故。
此外,根据相关数据统计,在各类事故死亡人数中,交通事故死亡人数所占比例为78.5%,已成为各种事故的“第一杀手”。其中,由于驾驶员疲劳驾驶造成的交通事故占事故总数20%左右,占特大交通事故的40%以上[2]。
因此,本文设计通过人工智能技术,对高速公路上具有潜在驾驶安全隐患的车辆驾驶员进行预警,以提高车辆驾驶员的安全驾驶意识,降低其安全驾驶风险。从而降低高速公路因驾驶员人为因素造成的交通事故发生率和人员伤亡率。
2 设计方案
2.1 总体构架
本系统将基于现有的高速公路摄像头、雷达、ETC门架等设备,对驶入高速公路车辆的行驶轨迹、速度变化进行数据采集,进一步采用人工智能方法分析处理,得出车辆行驶状态、驾驶员的驾驶状态,并采用加权的方式对车辆行为进行评分,进而对驾驶状态异常的车辆驾驶员进行提醒,从而达到降低交通事故发生率,减少人员伤亡的目的。总体构架如图1所示。

图1 系统总体构架
2.2 系统设计
本系统采用一车一码的监测方案,当车辆进入高速公路入口收费站时,通过视频监控、ETC设备采集车辆信息,并建立此车辆档案,然后车辆进入高速公路;当车辆经过测速雷达和相应摄像头时,记录此车辆速度、当前时刻与车辆所在车道等信息;当车辆经过ETC门架设备时记录当前时刻与车辆所在车道等信息;当车辆经过1 280 p分辨率以上的摄像头(包括出入口附近的广角摄像头、车道上放的摄像头等)时,采用基于OpenCV下的图像识别处理技术对车辆的行驶轨迹进行判断。基于以上4种方式对驾驶员驾驶车辆状态不断进行评分,若出现车辆评分高于阈值,则由相关部门手动或自动通过短信、电话、广播等方式对车辆驾驶员进行预警,或对车辆驾驶员采取其他相关措施,进而降低交通事故发生率。
基于以上设计,此系统模块可以分为:车辆信息存储模块、车辆位置参数采集模块、车辆时刻参数采集模块、视频参数采集模块、参数计算模块、视频参数分析模块和评分预警模块。特别的车辆位置参数与车辆时刻参数模块的目的是指当车辆经过ETC门架、雷达测速装置、摄像头等能够识别此车辆通过的相关装置,并由此直接得出或间接计算得出车辆所在车道和车辆速度信息,并为下一步人工智能分析提供相对直观和较完善的数据。
2.3 系统组成
2.3.1 车辆信息存储模块
当车辆驶入高速公路入口收费站时,此模块将对驶入高速公路的车辆建立特定“档案”,存储车辆车牌号、车型、驾驶员联系方式、OBU或CPC卡等可对车辆进行特定识别的相关信息。为接下来的信息存储和车辆行为评分做准备。
2.3.2 车辆位置、时刻、视频参数采集模块
此模块的工作方法我们将其分成三类讨论,但最终目的都是将车辆相关行为记录至计算机,也将对车辆行为评分做准备。
一般情况下,对于ETC门架上RSU设备采集的车载OBU设备或CPC卡的信息包括车辆识别、车辆所属车道和车辆经过此RSU设备的时间此类信息;对于雷达测速装置采集到的信息包括一系列的车辆瞬时速率、车牌信息、车辆所属车道等信息;对于在高速公路出入口匝道附近的高清监控摄像头,因为其识别范围广、精度高,且可以以较高的码率传输视频信号,所以可以主要作为基于OpenCV下人工智能图像识别的功能。因此,此装置可以采集到较长一段时间内的车辆速度变化情况、车牌信息、车辆所属车道信息。若在摄像头分辨率足够高,且网络传输速率足够快,计算机设备性能优良的情况下,还可识别到车辆驾驶员的驾驶状态,为车辆预警提供更多参考。
2.3.3 视频参数分析模块
上述,对于视频的分析主要是对高速公路出入口匝道附近的高清摄像头进行分析。分析的方法主要采用基于OpenCV下的图像识别技术,处理方式主要分为3个主要步骤。第一,对图像进行矫正处理。因车辆在高速公路上行驶速度较快,且多数摄像头摆放位置较高,与车辆行驶方向呈一定角度。因此采用基于标定板的摄像机标定的方法,利用摄像机成像模型以及标定板上特征求解其内外参数,以实现对车辆的定位和对摄像头的畸变矫正[3]。第二,对图像进行灰度、降噪、滤波、二值化处理,且调用无车情况下当前时间,当前天气的历史影像,采用OSTU算法的阈值自适应选择算法[4],与当下实时影像逐帧进行比对,判断图像不同的区域,并对此区域物体进行轮廓分析,以对车辆进行跟踪。第三,对识别到的车辆车牌进行中值滤波、灰度拉伸、字符切字符识别等处理[5]。得知车辆的特征信息之后,将相关信息存入此车辆“档案”,并对其车辆驾驶状态进行评分。且将数据传入计算机对应此车辆的评分预警模块,以便于其他模块调用。
2.3.4 参数计算模块
根据收集到的数据,很容易可以统计出车辆在驶入高速公路至车辆所在位置之间的一系列车辆瞬时速率、车辆经过某一车辆识别装置的时刻以及车辆所在车道。根据两识别装置之间距离差Δx=x2-x1且根据经过两识别装置的时间差Δt=t2-t1计算得知平均速度为。若当车辆经过雷达测速装置时可以获知多次车辆的瞬时速率(此处v指的是速率),进而将其对时间t分别求其一阶和二阶导函数,得到车辆此刻的加速度和急动度。通过加速度判断出车辆的速度变化情况;通过急动度判断出车辆驾驶员对车辆“油门”控制变化的情况,并存储数据,为下面人工智能分析做准备。
此外,结合以往不同外部环境状况下μ与车辆车道变换频率λ的相关性关系,可以统计出不同车辆与不同路况车况条件下的定性关系,其中μ为不同外部环境状况,λ为车辆车道变换频率,ξ为外部环境状况与车辆车道变换频率λ之间的函数关系。

此处外部环境状况μ与当前路况、车况、车型、驾驶员的普遍驾驶习惯等都存在一定的联系。因此无法定量分析,只有通过大量数据统计得出较为准确的分析结果。
因此,我们接下来引入人工智能分析的方法。通过对大量实例的系统分析,不断更正学习,这样不仅可以减少因数学计算带来的复杂情况,还可以大幅提高对车辆驾驶行为评分的准确性。
2.3.5 评分预警模块车辆评分体系建立
此模块为本系统的核心模块,主要采用人工智能分析的方法对前期采集的基础数据和已经进行初步分析的数据进行深度分析。具体分析方法如下:
首先,遵循科学性与系统性的原则,建立车辆评分体系,将驾驶员状态、车辆状态、自然环境、人为环境作为一级指标,将方向盘抓握位置、车辆车道变化率、天气对路面影响、路面施工情况等作为二级指标,如图2所示。

图2 车辆评分体系
然后,通过人工智能对车辆评分指标进行权重判定。具体判定方法为:首先,采集以往事故车辆在高速公路上行驶的视频记录、车辆行驶速度等相关数据。然后,对此车辆事故的严重性以百分制的标准进行打分。进一步,根据上面提到的车辆评分体系E分别对事故车辆的E11~E43指标进行对应打分。将得出的数据进行以下处理:

式中:σ为此车辆事故造成的严重性进行评分的分数;m为一级指标个数;i、j分别对应相应的一级、二级指标。通过求和计算,从而得出不同指标对车辆事故的造成和造成事故严重性的权重。
进一步,使用初步建立的车辆评分体系对还未使用的车辆数据进行评分,将此判定数据与此车辆实际发生事故情况进行比对,不断采用人工智能学习、纠错,以提升车辆评分体系的科学性与准确性。流程如图3所示。
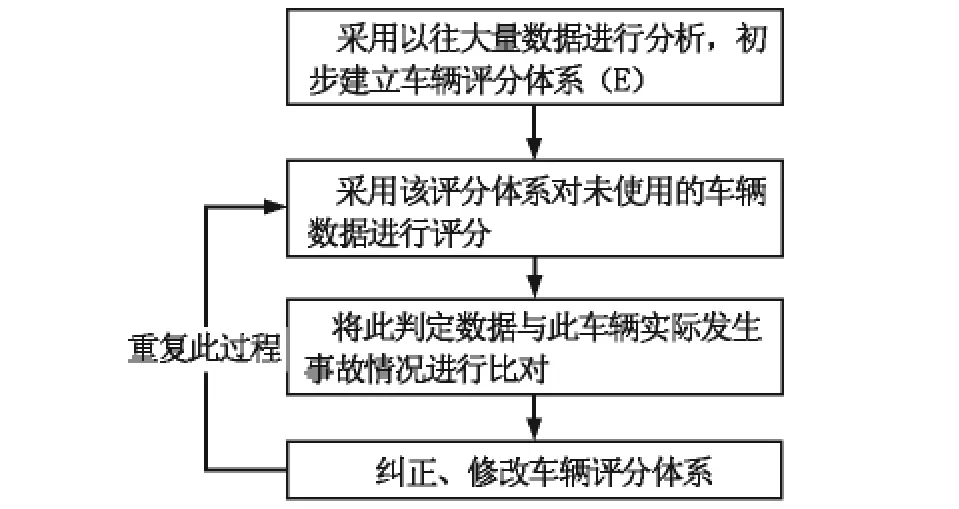
图3 车辆评分体系工作流程图
当车辆评分体系错误率降至合理范围之内,此系统将初步投入运营,对当下处于高速公路中的车辆进行评分和预警,且将继续同步不断地进行学习和纠错的过程,从而进一步完善车辆评分体系。
特别说明的是,上文在车辆评分体系中提到的一级、二级指标应根据不同地域、不同相关法律法规等实际情况做出适当调整,其中相关指标的权重判定,也可结合相关专家、考察队伍的建议进行权重和阈值的调整,以适应实际工作情况。
3 系统工作整体流程
a)车辆进入高速公路,采集车牌、车型等可特定识别此车辆的必要信息。
b)车辆经过视频监控、测速雷达、RSU门架等,采集相关数据。
c)数据传输至计算机,进行数据初步处理。
d)将处理完成的数据交由人工智能分析,人工智能给出驾驶评分。
e)根据预先设定好的阈值确定是否由高速交管中心向车辆驾驶员发出预警。
f)若e)向车辆驾驶员发出预警,则由高速交管部门做进一步处理。若e)未向车辆驾驶员发出预警,则返回执行b)。
g)车辆驶出高速,结束此次进程,将此次驾驶数据存储至数据库,备用。如图4所示。
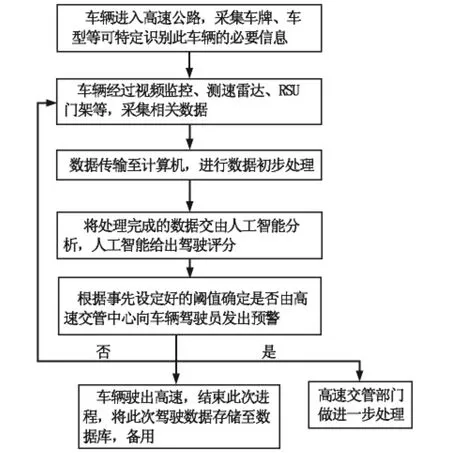
图4 系统工作整体流程图
4 应用前景
本系统将高速公路现有的设施做进一步开发,改造成本较低,且能大幅度地提高车辆在高速公路驾驶的安全性,有效降低高速公路事故率,提高车辆的通行效率,无论是对车辆驾驶员还是交通管理部门都会产生一定的积极影响。进而推动物流、运输、旅游行业的进一步发展。因此本系统有着广阔的应用前景。
5 结论
基于人工智能的高速公路车辆安全驾驶预警系统能够使用高速公路上现有的相关设施,通过计算机处理,人工智能学习、分析的方法,对车辆驾驶行为进行评分,从而对驾驶状态异常的车辆驾驶员进行提醒,以达到降低交通事故发生率,减少人员伤亡的目的。

猜你喜欢
中国交通信息化(2022年9期)2022-10-28 06:14:40
卫星应用(2021年11期)2022-01-19 05:13:02
汽车工程师(2021年12期)2022-01-18 06:02:43
科学大众(2021年9期)2021-07-16 07:02:50
中国交通信息化(2020年11期)2021-01-14 03:30:34
公民与法治(2020年17期)2020-10-27 02:27:52
小雪花·成长指南(2020年2期)2020-10-12 02:39:11
灾害医学与救援(电子版)(2016年4期)2016-03-11 20:18:15
中国交通信息化(2015年10期)2015-06-06 06:39:31
汽车维修与保养(2015年8期)2015-04-17 03:32:59