移动机器人在500kV 超高压变电站中的应用分析
2020-11-11 09:22涂炯炯
中国电气工程学报 2020年18期
涂炯炯
摘要:将机器人应用在 500kV超高压变电站中,充分结合了互联网和人工智能的优势。本文分析了移动机器人在 500kV超高压变电站中的优势,并对其工作流程进行了解析,具体阐述了移动机器人的应用功能。
关键词:超高压变电站;移动机器人;巡检
在二十一世纪,机器人已经不再是稀有的高新产物。机器人影响了人们的生活和生产,甚至在一定领域给人们带来了颠覆性的变化。现阶段我国的超高压变电站数量越来越多,就南方电网超高压输电公司而言,所辖全部变电站均为 500kV及以上电压等级。在超高压变电站中,为时刻确保电气设备处于正常的运行状态,需要提供更高质高效的巡检质量,确保电气设备的稳定性和可靠性。500kV超高压变电站目前基本采用 24小时有人值班模式,需要开展例行巡检和特殊巡检,按既定计划开展的是例行巡检,在高温、雨雪、保供电等特殊情况下开展的是特殊巡检。在以往科学技术水平不发达的情况下,巡检工作大部分由人工来进行的,少量风险高的工作采用固定摄像头远程监视。人工巡检或视频巡检完成后需手动录入相关数据,花费时间较长,工作效率低。如遇恶劣天气,人工巡检很难开展。随着我国的智能机器人研发和制作技术不断向前推进,它在电力系统的应用也正在成为关注重点。在 500kV超高压变电站中运用智能移动机器人来开展巡检工作已成趋势,也必将在实际运用中不断展现出移动机器人特有的优势。
一、500kV超高压变电站传统巡检方式的不足
设备巡检是变电站的常规工作,传统的巡检方式通常是人工巡检,即对变电站设备进行巡检时,工作人员主要依靠自己的感官来判断变电站中的电气设备状态是否正常。在具体巡检过程中,他们对巡检结果的认定主要是通过简单的定性判断,如用眼睛查看设备外观是否正常、设备绝缘状态是否良好、各气室压力是否充足、变压器油位是否符合温度曲线等。在夜间,则需要人工手持红外测温仪依次对相关设备进行红外测温,检测设备是否存在异常导致的过热现象,还需通过熄灯夜巡确认设备是否存在异常放电发光、过热发红现象。人工巡检结果受到多方面影响,巡检人员的专业水准是否达到要求以及巡检人员作业时的工作责任心和态度等都会给结果的准确性带来不确定性因素。此外,巡检人员巡检时所处的地理位置不同,面对设备的角度不一样,看到的结果都会存在偏差,导致巡检记录中隐含多种主观因素,相同状态产生不同结果,也给开展设备多维度分析带来困扰。人工记录的方式也会使得对设备状态的记录难以全面、客观,进而影响到巡检结果的准确性和统一性。人工巡检还受制于巡检人员的身体和心理状态,若巡检时状态不佳,则会直接导致巡检质量差、工作效率低等问题。
二、移动机器人在 500kV超高压变电站中的优势
移动机器人结合了互联网和人工智能的优势,其在 500kV超高压变电站中的应用,将变电站的管理推向智能化。移动机器人的引入,让变电站的管理更为安全,更有利于提高巡检的智能性和巡检效率,降低人工巡检的工作强度,提高巡检结果的准确性。此外,移动机器人具有可以灵活转动的机械手臂,方便深入设备狭窄或高温高热空间,减少了人工作业带来的安全隐患,也降低了因主观误判对巡检工作带来的人身风险。移动机器人还可以进行“无轨”巡检,通过激光定位、图像识别等技术实现路线优化,通过内置地图自动规划昀优路径,提高巡检效率,降低移动机器人物料磨损。通过内建局域网络,实现数据内网传输,防止涉密信息泄露,满足变电站保密工作要求。
三、移动机器人巡检的工作流程
在变电站中执行巡检作业的移动机器人一般包括监控后台、管理后台、通信终端和机器人终端等四个部分。其中,监控后台主要接收、处理和展示巡检系统的数据,它通过移动机器人的核心技术,如图像处理和模式识别,能够及时的识别出设备中的缺陷,并报警。监控后台向管理后台传输信息,通过数据管理和传输软件,构成相应的管理平台,当用户看到由监控后台传输的巡检结果,确认数据可靠后,通过管理平台下达指令,该指令通过通信装置传送给移动机器人,由机器人执行昀终指令。通信终端主要由无线网桥基站、网络交换机和无线网桥移动站等组成,通过无线网络传输协议实现后台与机器人的通信传输。机器人终端主要由定位点位和充电房组成,帮助移动机器人实现精确定位和能量补给。
四、移动机器人在 500kV超高压变电站中的应用和功能
(一)检测
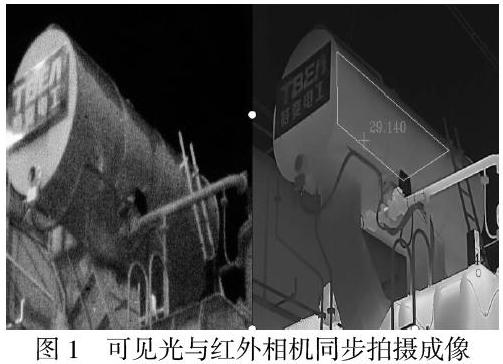
检测是移动机器人在巡检过程中执行的主要指令。在执行检测指令过程中,移动机器人运用多种智能检测技术,形成多样化的检测结果,提高对变电站设备运行状况检测的精确度和效率。在移动机器人中常用的一项技术是红外热检测。物体表面都会产生向外辐射的红外线,红外检测技术通过对红外探测器接收到的红外线信息进行分析,形成物体表面的实时红外热成像,通过热成像分析软件,即可通过非接触方式获取物体表面温度数据。移动机器人通过可见光摄像机同步拍摄的设备外观,对比分析照片与红外热图,可准确确定故障的具体位置(图 1所示)。此外,移动机器人通过利用声波采集装置,将电气设备运行过程发出的声音搜集起来,再通过人工智能分析软件提取其中的声音特征,经对比、分析,判断电力设备的运行状态是否正常。移动机器人所有检测数据传输至后台进行存储、分析,若达到预先设定的报警定值,则可通过声光等方式进行预警,提醒值班人员对设备异常进行确认。
(二)定位、导航
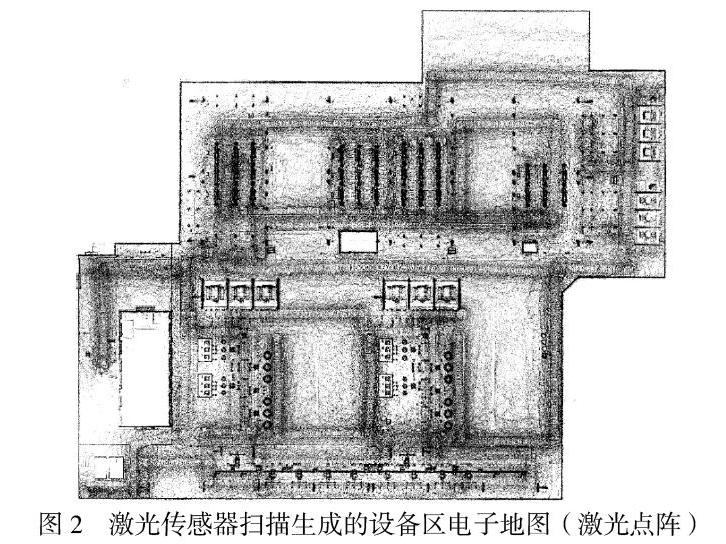
移动机器人在变电站的应用离不开高精度定位、导航技术的支持。激光定位是当今昀可靠的移动机器人定位技术,可实现机器人无轨导航。激光导航的优势显著,如成本较低、全时段工作、抗电磁干扰等,另外,激光定位相比GPS、北斗等导航设备,其不受天气影响,可实现全天候工作,且定位精度更高,可实现小范围精准导航。激光定位的工作原理和流程包括以下几个部分:移动机器人以激光雷达的方式感知周围环境,并处理获得的激光点云数据,在机器人移动的位置构建出实时地图,在此基础上进行正确的判断,规划好移动路线,避开障碍物,直至到达目标位置。移动机器人若要实现激光导航,需要在机器人本体中安装激光传感器,扫描周边环境生成电子地图,并使其能够随时记录机器人的全局坐标和位置(图2所示)。激光传感器可通过检测到的周边环境中的路标,获取传感器在全局中的位置和方向,实现移动机器人实时定位及路线导航。三边测量法和三角测量法是两种重要的定位计算方法。三边测量通过测量机器人和已知路标之间的距離,以此确定机器人的实时位置。三角测量相对比较简单,但也广泛应用于移动机器人领域。移动机器人通过激光定位技术实现“无轨”自动定位导航,大大改善了以往磁导航路面施工量大、可扩展性差、维护成本高等问题。同时,激光导航可通过算法得到昀快的路径,提高巡检效率。
(三)控制
移动机器人目前主要有两种控制方式:手动控制和自动控制。手动控制是指后台人员通过操控电脑端来进行云操作,实现机器人的移动,这种方式多用于对特定设备进行专门巡视和异常确认。自动控制则是在开始巡检前在后台系统规划好机器人移动路线,或直接下达预先设定好的巡检任务,使机器人按照既定路线和动作开展自动巡检和识别。
(四)远程图像监测
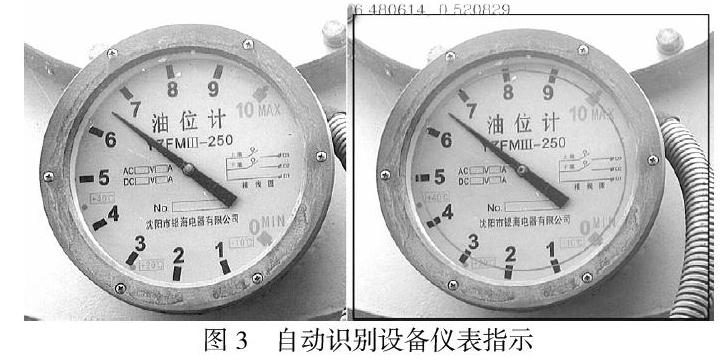
远程图像监控是移动机器人的重要应用之一。移动机器人将巡检过程中采集的图像数据传输至后台进行预处理,通过累计分析、相关分析等算法将采集的图像与先前采集的图像进行对比分析,识别出处于监测状态的电力设备的运行状况。对于设备仪表类信息,则通过图像识别算法标注表计指示位置,进一步读出表盘数据供后台存档,形成巡检记录(图 3所示)。如果设备是正常的,则进入到下一个图像的分析中。如发现图像对比异常,则将信息存储,并发出警报。停止接下的图像传输工作,让值班人员可以在不需要始终关注屏幕的情况下完成远程监测,提高了设备监测工作的效率。
五、结束语
综上所述,巡检工作对保证 500kV超高压变电站的正常稳定运行十分重要。移动机器人在 500kV超高压变电站巡检工作中的应用,必将显著提高变电站工作的效率,实现变电站巡检工作的智能化转变。
参考文献
[1]彭林,王绍亚.巡检机器人在无人值守变电站的应用探究[J].电子世界,2017(01):157,159.
[2]山东电力集团.电力设备红外测温诊断技术工作手册.
[3]成大仙.机械设计手册[M].化学工业出版社,2008.
[4]祖丽楠.变电站巡检机器人导航方法研究[J].科学技术与工程,2013.
猜你喜欢
设计(2020年24期)2020-01-25
现代职业教育·中职中专(2018年11期)2018-06-11
物联网技术(2017年2期)2017-03-15
科学与财富(2016年21期)2017-03-02
中国新通信(2016年23期)2017-03-01
中国高新技术企业(2016年34期)2017-02-10
电子技术与软件工程(2016年20期)2016-12-21
科学与财富(2016年28期)2016-10-14
软件导刊(2015年8期)2015-09-18
物联网技术(2015年4期)2015-04-27