基于改进人工蜂群算法的灭火机器人路径规划研究
2020-11-11 05:11:32王艳春夏颖房汉雄李相敏乔志博
高师理科学刊 2020年10期
王艳春,夏颖,房汉雄,李相敏,乔志博
基于改进人工蜂群算法的灭火机器人路径规划研究
王艳春,夏颖,房汉雄,李相敏,乔志博
(齐齐哈尔大学 通信与电子工程学院,黑龙江 齐齐哈尔 161006)
针对传统人工蜂群算法在求解机器人路径规划问题时存在的精度低、收敛速度慢等问题,提出了改进的人工蜂群优化算法解决灭火机器人路径规划问题.改进的算法通过完善适应度评价机制和迭代更新参数提高算法适应力.仿真结果表明,该算法可以有效平滑路径,降低灭火机器人路径规划时间,提高其路径规划效率.
路径规划;人工蜂群算法;灭火机器人
机器人路径规划是智能移动机器人研究的核心内容之一[1].灭火机器人作为智能移动机器人的一种,主要用于协助消防员进行复杂、高危火灾现场监测和灭火救援,以提高灭火的精度和效率.灭火机器人路径规划使机器人能够绕开障碍物,为机器人提供出一条从起始点到目标点的安全防碰、高效的运动路径,代替消防员在危险火灾环境下高效完成救援任务.常用的移动机器人路径规划方法主要有人工势场法、可视图法、栅格法、拓扑法以及蚁群算法、遗传算法、粒子群算法、人工蜂群算法等群智能算法[2].
人工蜂群算法(Artificial Bee Colony,ABC)作为一种群智能算法,具有收敛速度快、精度高等优点,但同时,也存在进化速度慢、容易陷入局部最优等不足[3].为了克服这些缺点,研究人员根据应用需求对人工蜂群算法进行了相应的研究.目前,多数学者主要集中于对人工蜂群算法的性能改进,而将该算法应用于灭火机器人路径规划的研究尚不多见[4].因此,本文以蜜源花香浓度为启发信息,采用并行机制选择策略,通过自适应调节让蜜蜂在路径规划过程中更倾向于朝着目标方向运动的基础上,提出了将改进人工蜂群算法用于灭火机器人路径规划,并通过实验验证了算法的可行性和有效性.
1 传统人工蜂群算法
1.1 传统人工蜂群算法基本思想
人工蜂群算法通过模拟蜜蜂采蜜的过程,实现寻优的目的.该算法由引领蜂、非引领蜂和蜜源3个要素组成[5],其中非引领蜂有跟随蜂和侦察蜂2种.算法基本思想为:
(1)每个引领蜂选取一处蜜源;
(2)引领蜂对当前蜜源进行邻近搜索,发现新蜜源,记录蜜源位置、蜜量等信息;
(3)引领蜂搜索完成后以摇摆舞的形式将蜜源信息传递给蜂巢里的跟随蜂,跟随蜂根据引领蜂传递的蜜源信息,选择一个蜜源进行邻域搜索;
(4)当引领蜂在蜜源处进行邻域搜索达到一定的次数还没有找到新的蜜源,该蜜源将被放弃,引领蜂转变为侦查蜂,随机寻找新的蜜源.重复上述过程,直到满足要求为止.
在求解优化问题时,每个蜜源位置代表拟求解优化问题的一个可行解,其它具体参量信息对应关系见表1.

表1 人工蜂群算法与优化问题具体参量的对应关系
1.2 传统人工蜂群算法实现步骤
人工蜂群算法按照以下步骤寻优[6]:






2 改进的人工蜂群算法
灭火机器人工作环境为复杂的障碍物环境,由于环境中存在大量连续障碍物和障碍物陷阱,机器人难以找到最优路径,甚至导致路径规划失败.传统人工蜂群算法的基础上,对适应度评价策略选择及迭代更新方法进行了改进,提出了改进的灭火机器人路径规划方法.
2.1 改进算法的基本思想
改进的人工蜂群算法基本思想:传统人工蜂群算法适应度评价采取轮盘赌选择机制,改进算法中新蜜源适应度评价将轮盘赌机制和轮盘赌反向机制[7]相结合,采用并行选择策略提高适应度;改进算法进行迭代更新过程中以花香浓度[8]为启发信息,蜜蜂可以按照花香浓度大小来搜素蜜源,这样蜜蜂寻找优良蜜源的概率变大,效率得以提高.
2.2 改进人工蜂群算法实现步骤

2.2.2 邻域搜索 引领蜂对所有的蜜源进行邻域搜索,按式(2)产生新蜜源.


3 基于改进人工蜂群算法的路径规划仿真实验

所选参数设置为:最大迭代次数MCN=300,蜜蜂种群数N=20,则引领蜂和侦查蜂数量Ns=10,Ne=10,向量空间维数D=10,寻优停滞阈值limit=6.传统算法和改进算法路径规划仿真结果见图1.
从图1a可以看出,路径经过很多弯曲折线才到达最终的目的地;从图1b可以看出,在同样的仿真条件下改进后的机器人路径规划明显要优于改进前的路径规划.
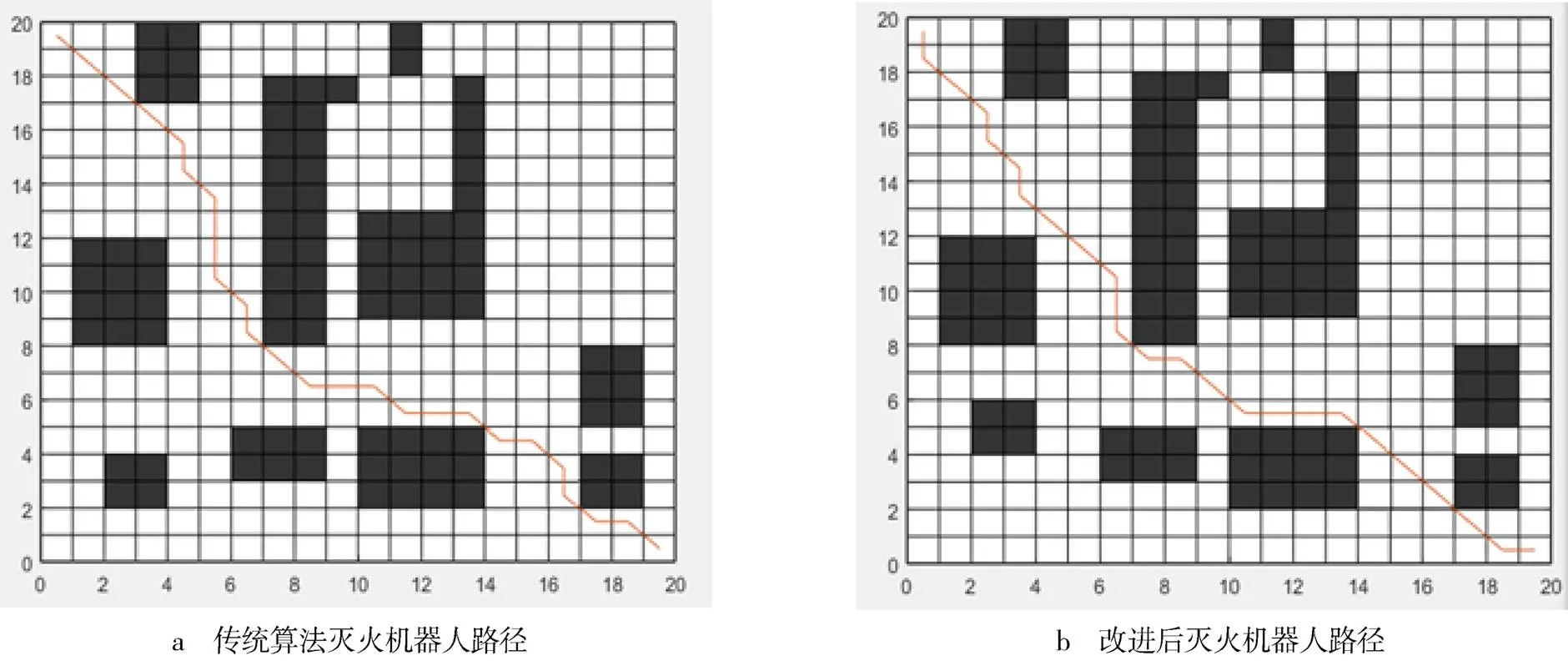
图1 2020优化前后路径对比
4 结语
本文对人工蜂群算法进行一定的改进,将蜜源花香浓度引入到人工蜂群算法中,采用并行选择策略使灭火机器人进行规划路径时更倾向于朝着目标的方向运动,随着迭代次数的增多,减小搜索区间,优化局部值.通过实验证明,相比于传统人工蜂群算法,改进后的人工蜂群算法收敛更快,规划出的路径也更加平滑.
[1] 吴方圆.基于改进蜂群算法的工业机器人路径规划研究[J].电子测量技术,2019(7):13-17
[2] 王艳春,马驰,赵鑫,等.灭火机器人路径规划研究[J].信息通信,2018(1):144-145
[3] Wu Bin,Qian Cunhua,Ni Weihong,et al.Hybrid harmony search and artificial bee colony algorithm for global optimization problems[J].Computers & Mathematics with Applications,2012,64(8):2621-2634
[4] Kong X,Liu S,Wang Z,et al.Hybrid artificial bee colony algorithm for global numerical optimization[J].Journal of Compu-tational Information Systems,2012,8(6):2367-2374
[5] Zhu G,Kwong S.Gbest-guided artificial bee colony algorithm for numerical function optimization[J].Applied Mathematics and Computation,2010,217(7):3166-3173
[6] 周国春,肖本贤.基于人工蜂群算法的机器人路径规划研究[J].自动化与仪表,2018,33(5):48-52
[7] 倪郁东,李媛媛,沈吟东,等.基于改进人工蜂群算法的移动机器人路径规划研究[J].合肥工业大学学报:自然科学版,2019,42(11):1570-1575
[8] 刘东林,陈银银.基于花香浓度的人工蜂群算法在机器人路径规划中的应用[J].华东理工大学学报:自然科学版,2016, 32(3):375-381
Research on path planning of fire extinguishing robot based on improved artificial bee colony algorithm
WANG Yanchun,XIA Ying,FANG Hanxiong,LI Xiangmin,QIAO Zhibo
(School of Communication and Electronic Engineering,Qiqihar University,Qiqihar 161006,China)
Aiming at the problems of low accuracy and slow convergence speed in the traditional artificial bee colony algorithm when solving the robot path planning problem,an improved artificial bee colony optimization algorithm is proposed to solve the path planning of the fire extinguishing robot.The algorithm improves the algorithm's adaptability by improving the fitness evaluation mechanism and iteratively updating parameters.Simulation results show that the algorithm can effectively smooth the path,effectively reduce the path planning time of the fire extinguishing robot,and improve its path planning efficiency.
path planning;artificial bee colony algorithm;fire extinguishing robot
TP242.6
A
10.3969/j.issn.1007-9831.2020.10.006
1007-9831(2020)10-0023-04
2020-07-18
黑龙江省教育厅基本业务专项齐齐哈尔大学科研项目(135209237);黑龙江省科学基金项目(QC2018045)
王艳春(1972-),女,黑龙江齐齐哈尔人,教授,从事嵌入式系统应用、无线传感器网络、机器人控制研究.E-mail:459671802@qq.com
猜你喜欢
贵州科学(2023年6期)2024-01-02 11:31:56
北京航空航天大学学报(2022年6期)2022-07-02 01:59:12
林业与生态(2022年5期)2022-05-23 01:16:51
小哥白尼(军事科学)(2020年4期)2020-07-25 01:25:22
高中生·天天向上(2018年1期)2018-04-14 09:24:38
制造技术与机床(2017年3期)2017-06-23 08:11:21
现代计算机(2016年17期)2016-02-28 18:35:33
湖南农业(2015年5期)2015-02-26 07:32:30
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28 12:21:31
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28 12:21:19