
一种水下仿生机器鱼的设计
2020-11-09 13:23杜福鹏
无线互联科技 2020年15期
杜福鹏,陈 涛
(兰州石化职业技术学院,甘肃 兰州 730060)
随着陆地资源的枯竭,具有丰富资源的海洋成为人类探索的新方向,仿生机器鱼[1-3]具有高速度、高效率、灵活性好、低噪声、驱动方式多样等特点[4-6],为海洋探索提供一个可供选择的途径,已经成为学者们研究的热点之一。
本文设计一种仿生机器鱼,通过鱼身、鱼尾的潜水模块、推进模块以及摆动模块的配合,实现仿生机器鱼的水下运动,为机器鱼驱动机构设计提供一种合理的方案。
1 仿生机器鱼总体设计
仿生机器鱼总体结构主要分为鱼头、鱼身、鱼尾3个部分。(1)鱼头部分,由控制电路板、Openmv4摄像头、无线接/发送模块、无线接收模块、指示灯构成。(2)鱼身部分,由鱼前身和鱼后身组成,鱼前身外形设有开关塞和充电口塞,内部设有开关、充电口、前潜水模块;鱼后身设有Arduino控制板、电机驱动板、电源监测模块、电池盒、后潜水模块。(3)鱼尾部分,设有推进模块和摆动模块。仿生机器鱼总体结构如图1所示。

图1 仿生机器鱼总体结构
2 仿生机器鱼控制系统设计
本仿生机器鱼可实现自主控制和远程控制。(1)自主控制系统,通过Openmv4摄像头采集信息,并转化发送至Arduino控制器中,驱动相应的运动模块进行运动,从而实现自主运动的能力。(2)远程控制系统,通过PC端发送相应指令去完成对仿生机器鱼运动的控制,同时,将Openmv4采集到的视频信息实时上传到PC端,从而实现远程操作。控制系统的总体原理如图2所示。
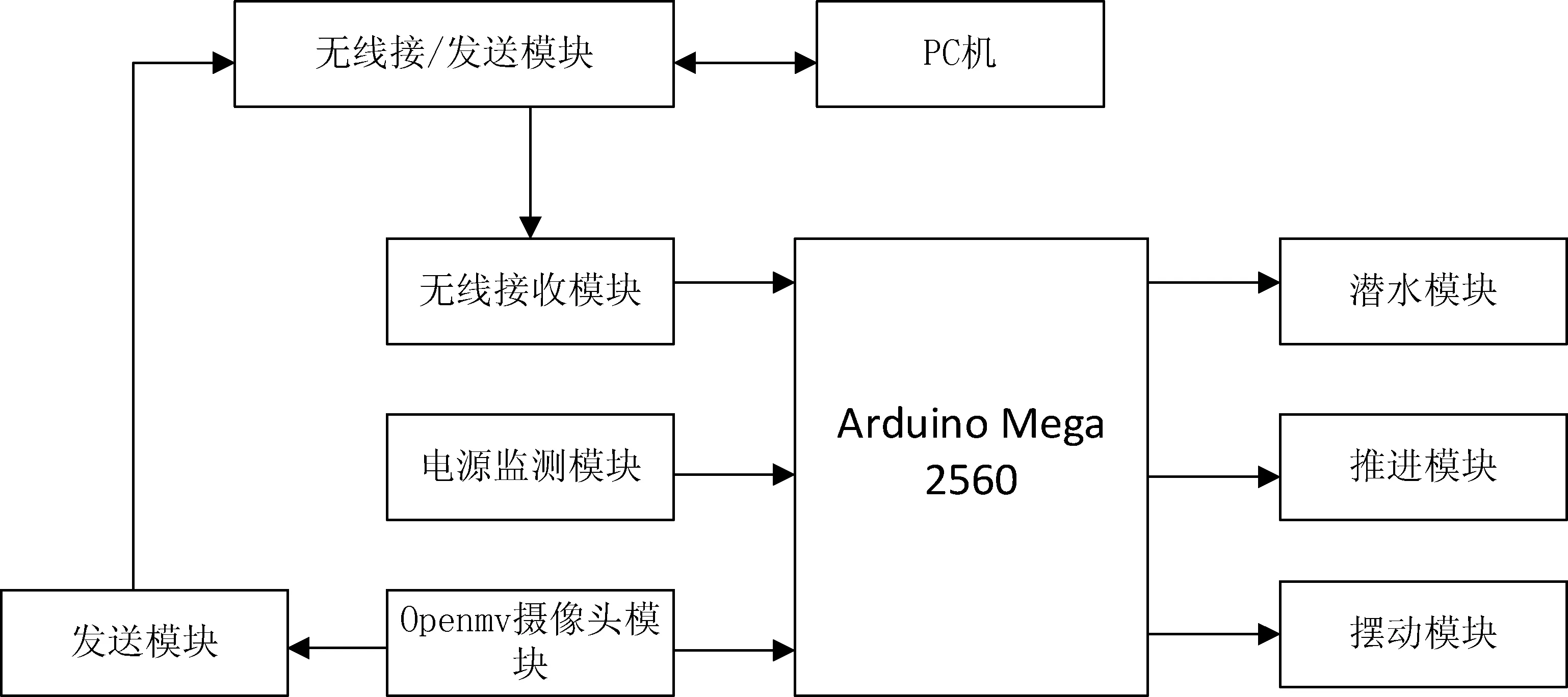
图2 控制系统的总体原理
2.1 主控板设计
Arduino Mega2560是基于ATmega2560单片机的微控制板,ATmega2560单片机是一款16位单片机,采用USB接口的核心电路,具有54路数字输入/输出口IO口,16路模拟输入端口,可以同时实现多路脉宽调制(Pulse Width Modulation,PWM)的输出,同时,拥有4路UART串口、USB连接口、电源接口、ICSP头和复位按钮,具有操作简单、价格低廉、方便开发等优点,能够满足所设计的仿生机器鱼的功能需求,因此,选择Arduino Mega2560作为仿生机器鱼的主控板。
2.2 图像传感器设计
OpenMV摄像头是一款小巧、低功耗、低成本、能轻松完成机器视觉应用的图像处理采集传感器,可以通过高级语言Python的数据结构在机器视觉算法中处理复杂的图像输出。
本文设计的仿生机器鱼利用Arduino Mega2560主控板完全控制OpenMV摄像头,通过拍摄采集图像信息或者执行主控板中的算法来实现。也可以把OpenMV摄像头中的算法处理结果输出,通过Arduino Mega2560主控板驱动舵机及电机实现仿生机器鱼的预期运动.因此,选择OpenMV可以有效完成仿生机器鱼图像采集和图像处理的任务。
2.3 驱动控制电机选择
舵机采用PWM控制的方式,舵盘的位置与脉冲宽度相对应,在0°~180°的范围内呈线性变化。在脉宽一定时,无论外界转矩怎样改变,输出轴只会保持在一个相对应的角度上,只有当脉冲信号的宽度发生变化时,输入轴的输出角度才会发生改变到新的对应的位置上。由此可见,舵机相对于其他电机更适合仿生机器鱼尾部摆动模块的驱动。
舵机内部有基准电路和比较器,基准电路产生周期20 ms、宽度1.5 ms的基准信号,比较器将外加信号与基准信号相比较,判断出方向和大小,从而产生舵机的转动信号,实现仿生机器鱼的尾部摆动。
仿生机器鱼在水下运动需要较好的密封性,选择具有运行声音小、无火花、使用寿命长、速度高等优点的高速无刷电密封电机作为机器鱼推进模块和潜水模块的动力来源。
3 仿生机器鱼运动实现
鱼类的运动形式与其体形和鳍的形状密切相关,提供动力主要依靠以下3种方式:(1)利用躯干部和尾部的肌肉收缩波浪式运动。(2)依靠鳍的摆动划水运。(3)利用鳃孔向后喷水引起的反作用力使鱼体前进。
本文将上述鱼类的第二种和第三种游动方式相结合,设计了一种摆动模块和推进模块,将其安装在机器鱼的尾部,通过推进模块两个电机同时正传或反转以及摆动模块舵机控制的组合,来实现仿生机器鱼前进、转弯等基本运动。仿生机器鱼尾部模块设计如图3所示。

图3 仿生机器鱼尾部模块设计
鱼类不仅能够在水面灵活自如地游动,还具有上潜下潜的能力。为了使仿生机器鱼具有鱼类同样的运动能力,满足仿生机器鱼在水下作业的要求,特为仿生机器鱼设计了一种潜水模块。由安装在仿生机器鱼鱼前身和鱼后身的潜水电机正传、反转的配合,实现仿生机器鱼上升和下潜的功能。潜水模块设计如图4所示。
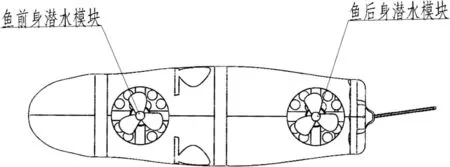
图4 仿生机器鱼潜水模块设计
当潜水模块、推进模块、摆动模块同时进行时,各运动模块互不干涉,可以单独密封,使密封容易实现,确保仿生机器鱼具有良好的密封性,能在水下平稳的运行。
4 结语
本文所设计的仿生机器鱼潜水模块、推进模块和摆动模块相互配合,能实现仿生机器鱼的沉浮、前进以及转弯等基本运动,具有良好的机动性和稳定性。同时,各模块相互分离,互不干涉,既能够单独控制也能耦合控制,又能实现任意方向的推进,并且密封容易实现,安全可靠。
猜你喜欢
控制与信息技术(2022年3期)2022-07-08
自动化学报(2019年6期)2019-07-23
网络安全和信息化(2018年2期)2018-11-09
电子制作(2018年1期)2018-04-04
数学大王·低年级(2017年8期)2017-08-04
学苑创造·A版(2017年7期)2017-06-24
制造业自动化(2017年2期)2017-03-20
电子制作(2016年11期)2016-11-07
文理导航·趣味课堂(2016年6期)2016-09-09
舰船科学技术(2015年8期)2015-02-27
