
无人直升机在海事领域的应用研究
2020-11-08 05:43王鹏石磊巫艳明
无人机 2020年10期
王鹏,石磊,巫艳明
中国直升机设计研究所
我国地处亚欧大陆东部,太平洋西岸,拥有一望无际的海岸线,海洋国土面积超过3×106km2,海上交通密集,险情多发,监管任务繁重。无人直升机以其机动灵活、可长时间飞行、部署快速、无人员伤亡、效费比高等优势,可在海事监管海域监管范围内执行日常巡航、溢油监视监测、违章查处、海上重大事件安保、应急搜救、通信中继、喊话等任务。
目前海事系统推行的立体化监管体系主要采用静态和动态监管手段相结合的模式,其中包括船舶交管中心(VTS)、自动识别系统(AIS)和视频监控(CCTV)等电子静态监管手段;海巡船日常巡逻,海事直升机和固定翼飞机不定期巡航,以及海巡车机动应急指挥处置等动态监管方式。随着技术的发展,现有安全监管水平已有很大提高,但从长远来看,现有的海事装备在监管范围、时效性、运行成本等方面仍存在一些问题和不足,仅仅依靠现有装备已无法满足当前及未来海事“陆、海、空”三维立体监管的需要。例如日常海事巡航,现有有人驾驶直升机或固定翼飞机的运营和维护成本高,且受天气因素和飞行员生理因素影响,导致空中巡航监管无法实现常态化。随着无人直升机载重能力、可靠性和安全性等性能指标不断提升,其在许多领域得到广泛应用。无人直升机的技术成熟度已经能满足日常海事巡航监管的需求,为丰富海事系统的监管手段,实现常态化空中巡航监管提供了新的解决方案。

图1 海事无人直升机。
无人直升机优势
无人直升机搭载海事任务载荷,可在监管海域内执行日常巡航、溢油监视监测、违章查处、海上重大事件安保、应急搜救、通信中继、喊话驱离等任务。相对传统手段,无人直升机应用于海事系统具备以下优势。
机动性强适宜应急
海上事故和自然灾害突发性强,其随机性、不可预知性则要求主管部门必须快速判明情况,组织指挥救援。小型无人直升机具有对起降地点要求低、自主飞行能力强、操作简单等特点,当紧急情况发生时,可在短时间内实现机动部署,采用远程遥控方式在异地起飞后,快速抵达目标区域,而无需大规模人员转场,具备较强的环境适应性,执行任务的方式也更加机动灵活,效率高。
执行持久广域海面巡航任务
无人直升机机上无飞行员,不会发生人员疲劳问题,经过适当维修保养后,可连续执行任务。其滞空时间仅依赖于平台的性能指标,特别适宜执行持久、广域海面搜索和监视任务,实现常态化巡航监管。
实时传输数据信息
无人直升机适合在高危环境中探测、飞行速度快。相较传统的监测手段,无人直升机可深入事故、灾害中心区域,最大限度接近目标,收集的情报信息可信度高,监测效果更佳,为溢油等事故调查取证提供有效证据。同时,无人直升机具备数据实时传输能力,第一时间为应急指挥决策提供数据,信息时效性强。
安全可靠
无人直升机操控员与平台分离,且位于安全区域,即使出现无人直升机坠落等情况,也不会造成人员伤亡,损失大幅降低。
受起降场地限制小
无人直升机不需要专用跑道,对起降环境要求低,可在沿岸复杂地形快速起降,执行任务。
效费比高
与直升机相比,无人直升机结构更简单,生产制造成本相对较低,售价也相应更低,用户的直接采购成本大幅下降。在人员培训方面,培训一个无人直升机机组与培训一位飞行员相比,无论是周期还是费用都大幅缩减。由此可见,无人直升机系统能以相对较低的成本,实现更大的作用,效费比大幅提升。
使命任务
无人直升机作为海事监管系统的重要组成部分,主要在近海、重要港口、航线及锚地等重点区域执行日常巡航监管、应急支持和通航保障等海事任务。
日常巡航监管
(1) 船舶巡查、监督
无人直升机巡查、监督船舶在航道、港池、锚地等区域执行有关安全管理规定的情况,监督船舶遵守避碰规则、船舶定线制等情况;
(2)海域环境监视
无人直升机定期巡查航道、锚地等通道密集区,加强有污染隐患区域的巡查,对存在非法排污行为的船舶进行及时追踪、调查取证;
(3)港区作业巡查
无人直升机巡查码头、港外系泊点、装卸站、渡口等设施的安全状况,对影响通航安全的捕捞、海上养殖、挖砂、海上娱乐活动等行为进行及时追踪、调查取证,及时报告巡航中发现的海上交通事故,必要时做应急处理;
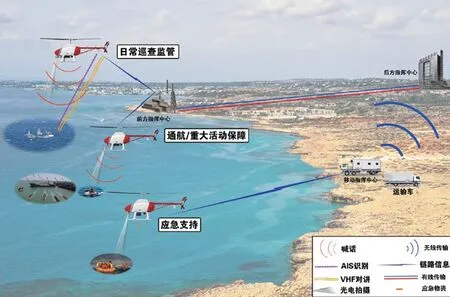
图2 典型应用场景图。
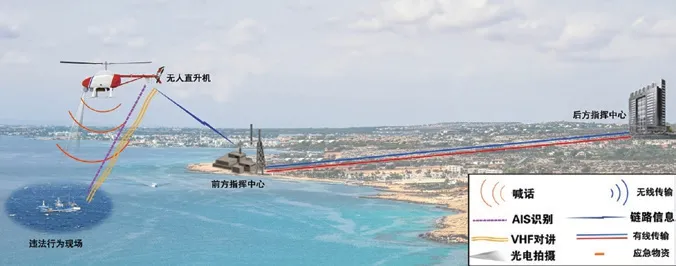
图3 无人直升机执行日常巡查监管任务。
(4)溢油监视监测
无人直升机在重要海域巡航,借助机载任务设备监控溢油、船舶倾废情况,对发现、控制和清除溢油起到支撑作用。
应急支持
(1)应急搜寻和定位
接到海上遇险报告后,快速启动无人直升机在相关海域开展应急搜寻,并将遇险位置实时回传至后方指挥中心;
(2)应急现场支持
无人直升机快速飞赴应急现场,在现场低速盘旋或悬停监测,将现场信息实时回传给指挥中心,供应急辅助决策,或通过海事对讲系统进行现场指挥和协调;
(3)搜救物资抛投
无人直升机携带轻便救生圈、海上应急示位标至事故地点投放应急物资。
通航保障
(1)通航秩序维护
无人直升机可维护交通管制区、交通密集区、捕捞作业区、桥区、油区、事故多发区等海域的通航秩序,保障重点船舶的航行安全;
(2)航海保障
无人直升机巡查助航、导航标志、水上建筑物安全标志的使用状态,巡查海域内是否存在妨碍航行安全的漂流物、碍航物;
(3)交通密集区通航环境调查
无人直升机观察、拍摄、跟踪了解船舶在交通密集区的通过情况,调查巡航海域不同季节渔船、定置渔具、养殖区分布情况;
(4) 重大活动保障
利用无人直升机对中央、地方政府以及军队的一些重大海上活动进行通航保障,如大型海上运动会、军事演习、卫星发射海上保障等。
典型任务剖面

图4 无人机开展应急支持。

图5 无人直升机执行通航保障任务。
无人直升机搭载光电、扩音、自动识别系统、海事对讲系统和抛投等设备在监管海域执行日常巡查监管、应急支持、通航保障等任务,通过任务设备将监管画面、船载自动识别系统信息、语音信息回传至地面指挥中心,第一时间提供信息。同时也可向船只扩音喊话或海事对讲系统对讲喊话,向遇险海域抛投应急物资或示位标,提供应急支持。
日常巡查监管及通航保障
(1)无人直升机在海事基地展开飞行准备,如挂载任务设备、加注燃油等
(2)利用地面控制站,控制无人直升机垂直起飞;
(3)无人直升机转入斜爬升飞行状态;
(4)无人直升机进入巡航高度后按预设航线进入监管海域;
(5)无人直升机对监管航道、港地、锚地等海域开展日常巡查和观测记录;如果遇到非法捕捞、养殖、挖砂等违法行为,无人直升机进入盘旋飞行状态,对违法船只和行为进行船载自动识别系统收集、喊话、语音通话并拍摄取证,将搜集的信息实时回传至地面指挥中心;
(6)执行航海保障任务时,无人直升机到达任务高度后,对任务海域进行巡航,检查助航装置、海上建筑物的使用状态,并将拍摄信息实时回传至指挥中心;
(7)执行重大活动保障时,无人直升机到达任务高度后,对任务海域进行巡航,如遇到影响重大活动的船只或障碍物,进入盘旋飞行状态,对障碍物进行定位,对船只进行船载自动识别系统收集、喊话以及语音通话,指导其驶离活动区域;
(8)完成巡查任务后,无人直升机返航。
应急支持
(1)接到任务后,为无人直升机挂装任务设备,装填救生物资,加注燃油等;
(2)利用地面控制站控制无人直升机垂直起飞;
(3)无人直升机转入斜爬升飞行状态;
(4)进入巡航高度后,无人直升机按预设航线进入任务海域;

图6 日常巡查监管及保障任务执行过程。
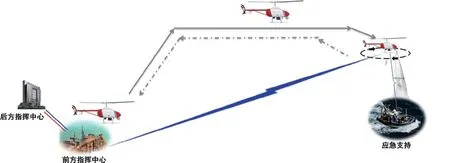
图7 应急支持任务过程。
(5)执行应急搜索和定位任务时,无人直升机对事故发生的海域开展搜索,当搜索到被困船只或人员时,通过定位装置进行目标定位,并将遇险位置实时传输至指挥中心;
(6)开展应急现场支持时,无人直升机根据目标位置,进入盘旋飞行状态,实时拍摄事故现场状态并回传至指挥中心,供应急辅助决策,并通过扩音设备进行现场喊话和提醒;
(7)需要抛投搜救物资时,无人直升机利用抛投设备将救生衣等物资投送给被困人员;
(8)完成应急支持任务后,无人直升机返航。
关键技术
复杂海洋环境下的通信技术
在无人直升机飞行高度较低时,无线通信需在海面环境下进行,无线电信号受海水镜面反射效应影响,产生无线电信号叠加,多径传输引起信道衰落。鉴于无线电信号在复杂海面上,特别是在有波浪的海面上传输时会受到各种干扰、吸收和衰减,如果在波浪波谷处发送无线电信号,大部分信号能量会被波浪阻挡和吸收,加大了通信的误码率。因此,需要对一种适用于海面无线通信环境,具备自愈能力的自适应联网技术进行研究,建立高效、可靠的海面无线通信系统和通信机制,提高信道利用率。
海上目标智能识别技术
多光谱、红外、可见光影像分别用于溢油监测、夜间侦察和日常电视监视监测。不同场景中这三种非同元传感器具有不同目标的监测能力。因此,需要以传感器的成像特性、像素精度、作用距离等多个角度为突破口开展技术攻关,建立适用于无人直升机机载平台,具有对目标自动识别功能的传感器决策融合方式,以达到更高的使用效能。
精准投放技术
针对无人直升机的应急支持需求,研究多体耦合飞行动力学建模、多体协调运动控制等一系列飞行控制技术,以及复杂海洋环境下的救援物资精准投放技术,解决投放过程存在的模型不确定性和旋翼下洗流、海上恶劣气象条件如强风等外部干扰因素对投放性能的影响,对失事人员、船只实施精准救援。
海面应急迫降技术
无人直升机在执行海事作业时,一旦遭遇飞行安全故障,需进行海面应急迫降。应急漂浮系统可以提高无人直升机海上飞行的安全性,确保无人直升机在应急迫降时在海面稳定漂浮,为救援人员从海面成功捞起无人直升机争取时间。因此,需针对无人直升机自转下滑特性,开展无人直升机应急漂浮系统技术研究。
与其它装备相比,无人直升机应用于海事领域,具备独特优势如垂直起降、定点悬停、低空飞行、无需专用跑道、响应速度快、搜索范围广、使用方式灵活、体积小、重量轻、研制和维护成本低、无人员伤亡等特点。无人直升机作为一种新的辅助手段应用到海事监管领域,能够进一步补充完善海事监管服务体系,优化海上安全监管体系,对全面推进我国海事现代化发展具有积极意义。■
猜你喜欢
中国水运(2022年9期)2022-10-14
水上消防(2021年5期)2022-01-18
水上消防(2021年3期)2021-08-21
水上消防(2020年5期)2020-12-14
船海工程(2020年2期)2020-11-28
水上消防(2020年3期)2020-07-25
船海工程(2020年2期)2020-06-08
中国水运(2015年10期)2015-11-09
源流(2014年4期)2014-04-21
