
单轨悬挂式胶带输送机巡检机器人研究设计
2020-11-06 06:05黎思奇刘枝峰
科学与财富 2020年22期
黎思奇 刘枝峰

摘要:一直以来,煤矿生产的安全指数备受社会与人民的关注,而煤矿生产的安全指数取决于煤矿生产所处的环境及煤矿生产所使用的设备。由于目前市面上的检测煤矿技术不够全面,以至于无法保证煤矿生产的安全指数在安全的区间内波动。正是有了可靠性较高的机器人技术的研发,煤矿生产的安全指数多了一种检测方式,保障了带式输送机更高效、更稳定、更安全的运行。在此基础上,本文研究设计了一种用于井工煤矿的单轨悬挂式巡检机器人,使用特有的检测系统进行检测,确保煤矿生产环境的安全与生产设备的高效运行。
关键词:带式输送机;巡检;机器人
前言:
带式输送机作为煤矿生产必不可少的运输机械,最常见的就是在井下作业工作中和洗煤厂的工作中。就我国目前的带式输送机巡检方式来说,一般以人工巡检为主,而人工巡检不仅工作难度大,工作效率也不高,检测的数据浮动范围过大。在我国煤矿事业使用的检测系统中,大都无法克服输送机传送距离长、监控范围广等特点。为了促进我国智能检测技术的提高,有必要对煤矿检测中的单轨悬挂式胶带输送机巡检机器人进行研究设计。一方面强化煤矿生产巡检工作的工作效率,另一方面可以有效预防带式输送机运作过程中发生事故。
1. 机器人系统设计
1.1 硬件组成
在煤矿生产中,单轨悬挂式胶带输送机巡检机器人的硬件组成有传动部分、信号采集部分和数据传输、监控部分。通过这三大部分的协调运作,充分发挥无线充电技术、无线感应技术、无线数传技术,及时准确的判断、检测煤矿巷道内不同类型的故障。打破人工检测的局限性,高效分析、处理检测数据,达到实时、准确预判紧急事故发生的效果。
1.1.1 传动部分
单轨悬挂式胶带输送机巡检机器人硬件组成中的传动部分主要是把动力装置产生的动能转化成工作机械中的动能。其转化装置主要包括了初始驱动装置、制止装置、悬吊单轨[1]。由初始驱动装置的启动使机器人本体在悬吊单轨上来回作业,以至于实时检测、监控带式输送机的有效信息。
1.1.2 信号采集部分
单轨悬挂式胶带输送机巡检机器人硬件组成中的信号采集部分主要通过内部传感器,来主动收集各种类型信号的。最终把收集到的各类信息向信号中心如实传送。信号采集部分由特种机器人本体、专用高灵敏度红外线温度传感器、矿用胶带机烟雾传感器、高抗噪声音采集器和专用高清防爆摄像机组成。在对信号的采集过程中,各个零部件缺一不可。
1.1.3 数据传输、监控部分
在单轨悬挂式胶带输送机巡检机器人硬件组成中,数据传输、监控部分主要通过DDN、2M、以太网等传输途径,把采集的信号传达给检测监控中心,从而达到监控效果。在这过程中,需要无线基站井下交换机、井下监控终端、地面控制中心监控终端、地面控制中心交换机等协调配合。数据传输、监控部分是巡检机器人硬件组成的核心,只有保持传输、监控部分的完整性,检测工作才能顺利进行。
1.2 机器人装置设计
在对单轨悬挂式巡检机器人装置的设计中,主要设计了特种机器人本体、特种机器人本体专用传感器、录像装置等主导装置。而特种机器人本体又包括对接线腔、主控腔和电池腔的设计,使主控箱与电池腔串联,在电池腔内设计专门的电池,为主控箱持续供电。特种机器人本体专用传感器就是要打破应用环境、数据处理、通信协议的差异性,实现信息共享。录像装置主要零部件有液晶显示屏、控制装置、成像设备等,一一对应着提取图像信息、增加图像聚焦、捕捉影像工作的进行。
1.3 数据采集系统设计
单轨悬挂式巡检机器人的数据采集系统设计主要有高级录像设备,比如可自动化清洁的防爆摄像机;灵敏度强的传感设备,比如专用烟雾传感器、专用温度传感器、专用湿度传感器。这些设计主要使单轨悬挂式巡检机器人在进行作业时,扩大检测录像范围,全面采集烟雾、温度、湿度、音质、动态图像等数据,同时还要检测到带式输送机的运行速度[2]。其次,利用模拟信号处理技术、数据分析处理技术设计一个高效处理信息的资料库,对采集的数据进行综合的筛选后压缩处理,为地面控制中心输送高质量的数据。
2. 机器人软件系统设计
2.1 程序设计
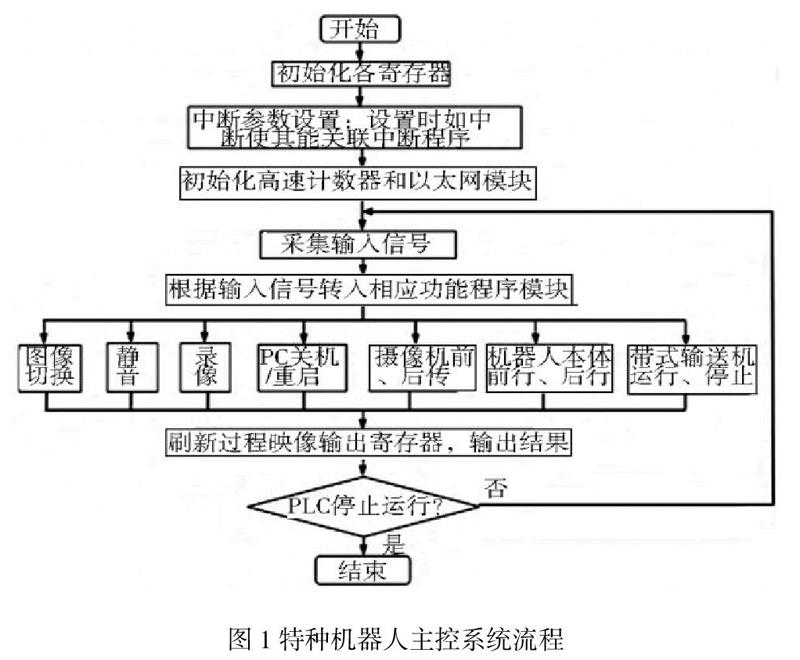
单轨悬挂式胶带输送机巡检机器人系统软件在西门子S7-200PLC的基础上得以开发,按照效果显著性来区分,其系统软件可分为控制本体驱动运行部分、控制音频、录像部分、控制带式输送机速率部分和控制程序截止部分[3]。在这四大部分的组成、调配下,呈现出完整的特种机器人主控系统流程,如图1。
2.2 机器人系统功能
2.2.1 環境数据采集功能
带式输送机在操作、作业的时候,由悬吊单行轨道与机器人装置的摩擦力驱动,使得机器人装置来回运动,机器人本体上的机械设备开启检测模式,配备的录像装置开始录像,发挥环境数据采集功能。在发挥环境数据采集功能后,还对采集的数据信息进行自动化储存,传输到煤矿管理人员的储存硬盘,便于煤矿管理部门根据采集的实时数据对矿山管理采取相应措施。
2.2.2 故障报警功能
在所设计的机器人系统中,具有故障报警功能的。在地面控制系统的操控下,机器人传输的实时检测信息可以被自主性判别,一旦信息安全指数不在安全区间内,警报系统便启动警报。待安全员到现场进行故障排查工作后,方可解除警报,带式输送机恢复工作状态。
3结语
总的来说,单轨悬挂式胶带输送机巡检机器人的设计,是井工煤矿事业发展的关键所在。通过机器巡检,不仅保障了矿产安全开采工作,也能提高煤矿生产效率。本文介绍的机器人系统,可以如实的反馈带式输送机作业情况,及时提醒作业安全问题,提高带式输送机的安全可靠性。为了我国矿产资源的合理开发,应该加大单轨悬挂式胶带输送机巡检机器人研究设计,排除资源使用过程中的安全隐患问题。
参考文献:
[1] 欧阳爱国.邵福.舒盛荣等.一种单轨悬挂式采茶机结构设计及通风管流场仿真分析[J].江苏农业科学,2019,47(20):236-240.
[2] 魏彬彬.综掘机履带牵引电缆装置的研制与应用[J].煤,2019,028(002):38-39.
[3] 胡步毛.潘妍.鲁昭.我国首条悬挂式单轨试验线建设实践[J].都市快轨交通,2019,32(01):48-52.
黎思奇 刘枝峰
摘要:一直以来,煤矿生产的安全指数备受社会与人民的关注,而煤矿生产的安全指数取决于煤矿生产所处的环境及煤矿生产所使用的设备。由于目前市面上的检测煤矿技术不够全面,以至于无法保证煤矿生产的安全指数在安全的区间内波动。正是有了可靠性较高的机器人技术的研发,煤矿生产的安全指数多了一种检测方式,保障了带式输送机更高效、更稳定、更安全的运行。在此基础上,本文研究设计了一种用于井工煤矿的单轨悬挂式巡检机器人,使用特有的检测系统进行检测,确保煤矿生产环境的安全与生产设备的高效运行。
关键词:带式输送机;巡检;机器人
前言:
带式输送机作为煤矿生产必不可少的运输机械,最常见的就是在井下作业工作中和洗煤厂的工作中。就我国目前的带式输送机巡检方式来说,一般以人工巡检为主,而人工巡检不仅工作难度大,工作效率也不高,检测的数据浮动范围过大。在我国煤矿事业使用的检测系统中,大都无法克服输送机传送距离长、监控范围广等特点。为了促进我国智能检测技术的提高,有必要对煤矿检测中的单轨悬挂式胶带输送机巡检机器人进行研究设计。一方面强化煤矿生产巡检工作的工作效率,另一方面可以有效预防带式输送机运作过程中发生事故。
1. 机器人系统设计
1.1 硬件组成
在煤矿生产中,单轨悬挂式胶带输送机巡检机器人的硬件组成有传动部分、信号采集部分和数据传输、监控部分。通过这三大部分的协调运作,充分发挥无线充电技术、无线感应技术、无线数传技术,及时准确的判断、检测煤矿巷道内不同类型的故障。打破人工检测的局限性,高效分析、处理检测数据,达到实时、准确预判紧急事故发生的效果。
1.1.1 传动部分
单轨悬挂式胶带输送机巡检机器人硬件组成中的传动部分主要是把动力装置产生的动能转化成工作机械中的动能。其转化装置主要包括了初始驱动装置、制止装置、悬吊单轨[1]。由初始驱动装置的启动使机器人本体在悬吊单轨上来回作业,以至于实时检测、监控带式输送机的有效信息。
1.1.2 信号采集部分
单轨悬挂式胶带输送机巡检机器人硬件组成中的信号采集部分主要通过内部传感器,来主动收集各种类型信号的。最终把收集到的各类信息向信号中心如实传送。信号采集部分由特种机器人本体、专用高灵敏度红外线温度传感器、矿用胶带机烟雾传感器、高抗噪声音采集器和专用高清防爆摄像机组成。在对信号的采集过程中,各个零部件缺一不可。
1.1.3 数据传输、监控部分
在单轨悬挂式胶带输送机巡检机器人硬件组成中,数据传输、监控部分主要通过DDN、2M、以太网等传输途径,把采集的信号传达给检测监控中心,从而达到监控效果。在这过程中,需要无线基站井下交换机、井下监控终端、地面控制中心监控终端、地面控制中心交换机等协调配合。数据传输、监控部分是巡检机器人硬件组成的核心,只有保持传输、监控部分的完整性,检测工作才能顺利进行。
1.2 机器人装置设计
在对单轨悬挂式巡检机器人装置的设计中,主要设计了特种机器人本体、特种机器人本体专用传感器、录像装置等主导装置。而特种机器人本体又包括对接线腔、主控腔和电池腔的设计,使主控箱与电池腔串联,在电池腔内设计专门的电池,为主控箱持续供电。特种机器人本体专用传感器就是要打破应用环境、数据处理、通信协议的差异性,实现信息共享。录像装置主要零部件有液晶显示屏、控制装置、成像设备等,一一对应着提取图像信息、增加图像聚焦、捕捉影像工作的进行。
1.3 数据采集系统设计
单轨悬挂式巡检机器人的数据采集系统设计主要有高级录像设备,比如可自动化清洁的防爆摄像机;灵敏度强的传感设备,比如专用烟雾传感器、专用温度传感器、专用湿度传感器。这些设计主要使单轨悬挂式巡检机器人在进行作业时,扩大检测录像范围,全面采集烟雾、温度、湿度、音质、动态图像等数据,同时还要检测到带式输送机的运行速度[2]。其次,利用模拟信号处理技术、数据分析处理技术设计一个高效处理信息的资料库,对采集的数据进行综合的筛选后压缩处理,为地面控制中心输送高质量的数据。
2. 机器人软件系统设计
2.1 程序设计
单轨悬挂式胶带输送机巡检机器人系统软件在西门子S7-200PLC的基础上得以开发,按照效果显著性来区分,其系统软件可分为控制本体驱动运行部分、控制音频、录像部分、控制带式输送机速率部分和控制程序截止部分[3]。在这四大部分的组成、调配下,呈现出完整的特种机器人主控系统流程,如图1。
2.2 机器人系统功能
2.2.1 環境数据采集功能
带式输送机在操作、作业的时候,由悬吊单行轨道与机器人装置的摩擦力驱动,使得机器人装置来回运动,机器人本体上的机械设备开启检测模式,配备的录像装置开始录像,发挥环境数据采集功能。在发挥环境数据采集功能后,还对采集的数据信息进行自动化储存,传输到煤矿管理人员的储存硬盘,便于煤矿管理部门根据采集的实时数据对矿山管理采取相应措施。
2.2.2 故障报警功能
在所设计的机器人系统中,具有故障报警功能的。在地面控制系统的操控下,机器人传输的实时检测信息可以被自主性判别,一旦信息安全指数不在安全区间内,警报系统便启动警报。待安全员到现场进行故障排查工作后,方可解除警报,带式输送机恢复工作状态。
3结语
总的来说,单轨悬挂式胶带输送机巡检机器人的设计,是井工煤矿事业发展的关键所在。通过机器巡检,不仅保障了矿产安全开采工作,也能提高煤矿生产效率。本文介绍的机器人系统,可以如实的反馈带式输送机作业情况,及时提醒作业安全问题,提高带式输送机的安全可靠性。为了我国矿产资源的合理开发,应该加大单轨悬挂式胶带输送机巡检机器人研究设计,排除资源使用过程中的安全隐患问题。
参考文献:
[1] 欧阳爱国.邵福.舒盛荣等.一种单轨悬挂式采茶机结构设计及通风管流场仿真分析[J].江苏农业科学,2019,47(20):236-240.
[2] 魏彬彬.综掘机履带牵引电缆装置的研制与应用[J].煤,2019,028(002):38-39.
[3] 胡步毛.潘妍.鲁昭.我国首条悬挂式单轨试验线建设实践[J].都市快轨交通,2019,32(01):48-52.
猜你喜欢
中国新通信(2016年23期)2017-03-01
中国高新技术企业(2016年34期)2017-02-10
山东工业技术(2016年24期)2017-01-12
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
